TBOX项目CAN服务深度解析:同步与异步数据传输
版权申诉
"TBOX项目中的CAN功能涉及到CANService,它是一个用于在多个应用程序间同步和共享CAN总线数据的机制。CANServiceBase负责从MCU的COMService接收CAN报文数据,并将其同步到其他应用。而CANService则提供内存管理、函数注册以及获取共享内存地址等功能。应用可以采用同步或非同步的方式获取数据。同步方式是直接通过共享内存读取,非同步方式则是通过回调函数通知。初始化流程包括创建队列、消息头、共享内存以及线程。读线程负责从MCU获取数据并写入共享内存,而写binder线程处理数据通知。ConfigSVC提供了同步和异步接口,用于管理CAN数据的注册、获取和回调注册。"
在TBOX项目中,CAN功能的实现是基于一个名为CANService的模块,它的核心任务是协调和传输MCU接收到的CAN总线数据到其他ECU或者应用中。CANService分为两个主要部分:CANServiceBase和CANService。CANServiceBase的主要工作是从MCUCOMService获取CAN报文数据,这些数据包括CANID、DLC(数据长度代码)和Data,并将这些数据同步到其他应用。同步是通过申请共享内存来完成的,CAN数据会被保存在这个内存中,供其他应用访问。
CANService的功能更加全面,它不仅为CANMgr提供函数注册接口,还为CANServiceBase提供了一套用于共享内存操作的子集。应用可以通过注册回调函数来实现非同步方式的数据获取,即当MCUCANservice接收到新数据时,会通过回调函数直接通知应用。另一方面,应用也可以选择同步方式,直接从共享内存中读取数据。
项目的初始化流程包含了几个关键步骤:首先创建一个APPList队列,用于存储应用的注册信息;接着创建MSG_HEAD队列,用于保存获取的CAN数据以便异步通知;然后创建一块2MB的共享内存,用于保存CAN数据供同步读取;此外,还需要启动一个读线程,它从MCU接收CAN数据并写入MSG_HEAD队列和共享内存。如果共享内存已满,读线程会等待内存可用并清理,这可能会导致CAN数据的接收延迟。
写binder线程则负责处理数据的通知,它从CANService获取已注册应用的信息,当MSG_HEAD队列有新数据时,它会通知已注册的APP。ConfigSVC作为接口服务,提供了同步和异步接口,如Get_CanMSG_List、Remove_CanMSG_List、Get_Latest_Can_MSG用于同步操作,而RegisterCanID、RegisterCallback则用于异步接口的注册。
TBOX项目中的CAN功能设计了一个高效且灵活的数据共享架构,能够适应实时性和效率要求较高的汽车电子控制单元间的通信需求。通过优化数据处理流程和内存管理,确保了CAN总线数据的准确和及时传输。
3
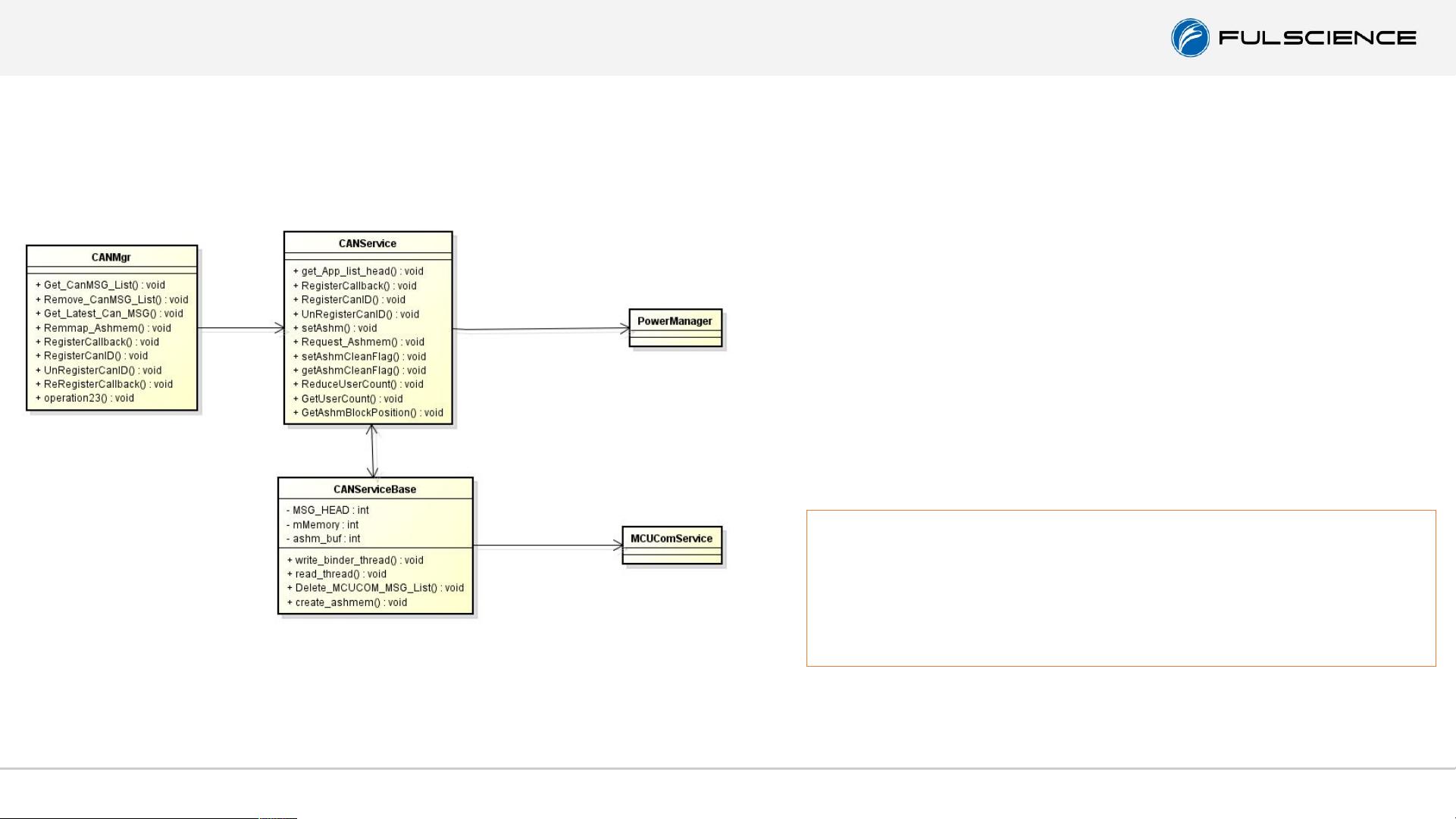
类图
CANServiceBase :
1. 从 MCUCOMService 获取 CAN 报文数据
(包括: CANID+DLC+Data )
2. 将获取的 CAN 数据同步给其他应用
3. 申请共享内存,并将获取到报文保存到该内存中
CANService :
4. 为 CANMgr 提供函数注册、获取共享内存地址等
5. 为 CANServiceBase 提供共享内存操作子集
应用可以通过同步和非同步两种方式获取 CAN 数据。
1. 非同步方式:需要注册回调函数。 MCUCANservice 获取到
CAN 数据后,直接通过回调的方式通知其他应用服务。
2. 同步方式:直接从共享内存中获取数据
剩余11页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-10-27 上传
2023-04-28 上传
2022-03-23 上传
2023-09-04 上传
2022-09-14 上传

小火球2.0
- 粉丝: 1102
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- 石竹山文武学校网络搭建实验
- linux扫描式教程
- AnalyzeIPv6_WinPcap.cpp
- JavaScript DOM编程艺术 英文版
- tslib-1.4交叉编译和分析
- 增益可变运放AD603的原理及应用
- 70-315面向.NET的Web应用程序设计for C#模拟题.pdf
- MATLAB图像处理
- TCP-IP详解卷1-001
- Eclipse中文教程---适合初学者
- 利用现成的资源(一个可发送短信的WebService)来开发短信发送程序.txt
- 华为编码规范---非常详细
- c++课件c++课件关于循环和函数
- 编程 - 贪心算法.pdf
- Asp.net开发必备51种代码
- ubuntu学习教程
