CAN总线基础与应用解析
需积分: 5 125 浏览量
更新于2024-07-09
1
收藏 964KB PDF 举报
"CAN总线学习总结.pdf"
CAN总线是一种广泛应用的串行通信协议,尤其在汽车电子系统中,由德国BOSCH公司于1986年开发。该技术基于OSI七层模型,但简化为两层:物理层和数据链路层。CAN总线的设计目的是为了在车辆中实现各个电子控制单元(ECU)之间的高效、可靠通信,它通过两根线——CAN_H和CAN_L来传输数据。
在物理层,CAN总线的通信依赖于CAN_H和CAN_L之间的电位差。隐性状态(逻辑1)表示这两条线上的电压差为0,而显性状态(逻辑0)则对应CAN_H为高电平,CAN_L为低电平。这种特性使得CAN总线具有独特的仲裁机制,即在数据传输过程中,多个节点同时发送数据时,优先级高的节点(发送的标识符更小)的信号会保持显性,从而确保数据的正确接收。
CAN总线的网络拓扑可以是星型、总线型、环形、树形或网状,但最常见的是总线型,其中所有设备共享同一条物理线路。为了防止信号反射并确保信号完整性,每个节点的CAN_H和CAN_L之间都需要接一个120Ω的终端电阻。
CAN协议分为两个版本,CAN2.0A和CAN2.0B。CAN2.0A仅支持11位的标准标识符,而CAN2.0B则增加了29位的扩展标识符,提供更大的地址空间以支持更多的节点和优先级设置。这两个版本都在数据链路层定义了相同的标准,但在物理层有所差异,对应不同的通信速度。例如,ISO11898是针对高速通信(125kbps-1Mbps)的标准,而ISO11519适用于低速通信(125kbps以下)。
CAN总线的流量控制功能确保了发送速率不会超过接收端的处理能力,防止数据丢失。透明传输则是指不论传输的数据是什么样的比特组合,都可以无误地进行传输,不会因数据中的特定比特组合与控制信息相同而导致误读。
在实际应用中,CAN总线广泛用于汽车、工业自动化、楼宇自动化和医疗设备等领域,它的优点包括高可靠性、错误检测能力以及对电磁干扰的耐受性。学习和理解CAN总线的工作原理和技术细节对于进行嵌入式系统设计和维护至关重要。
4
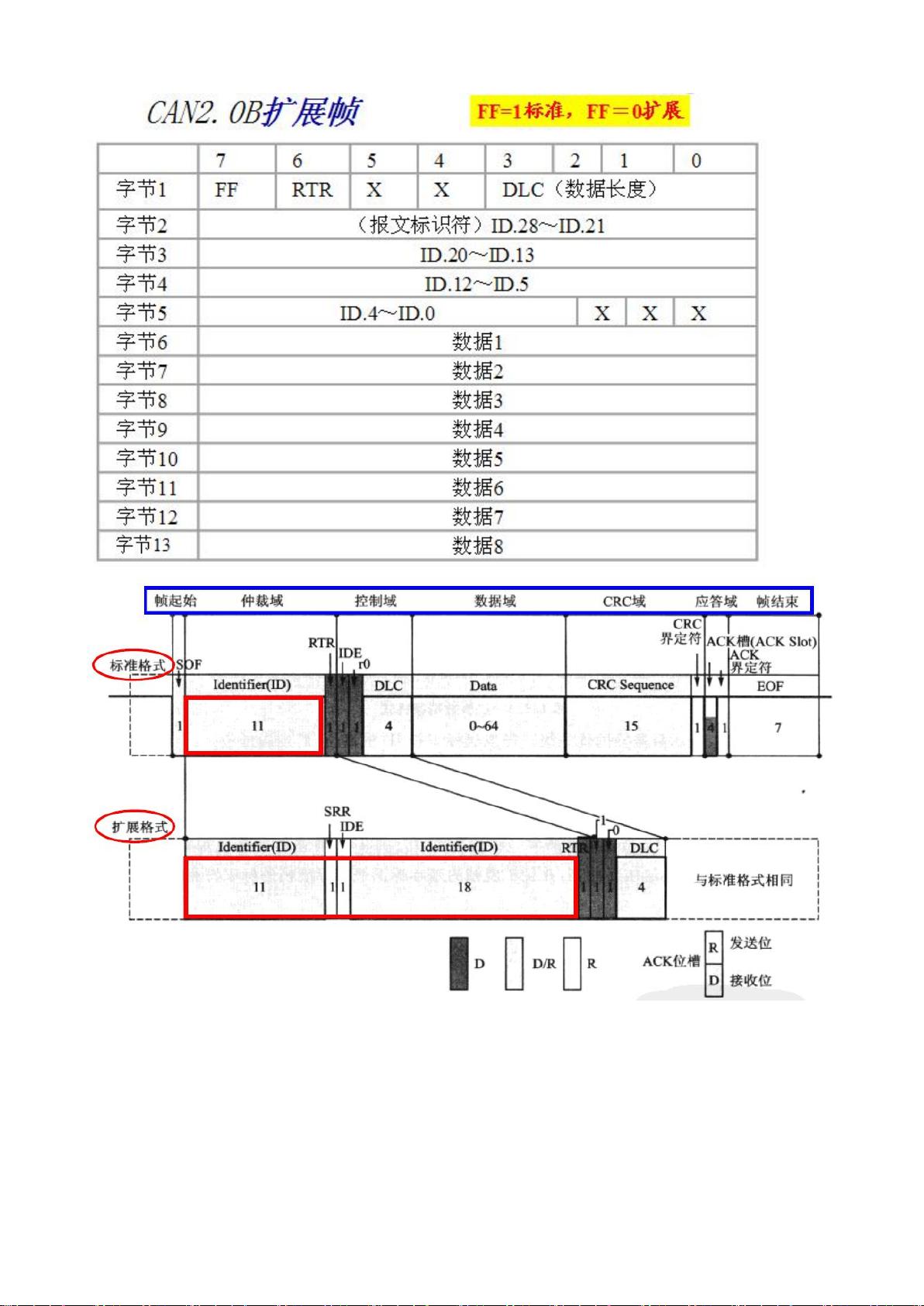
数据帧格式
3、 数据帧
数据帧由 7 个不同的部分组成:帧起始、仲裁域、控制域、数据域、CRC 域、应答域和帧结束。数据域的
长度可以为 0。
①帧起始:由一个单独的“显性”位(0)组成。
②仲裁域:仲裁域表示数据的优先级,标准帧和扩展帧的仲裁域不同。
在标准帧格式中,仲裁域由 11 位标识符(ID)和远程发送请求位(RTR)组成。
剩余15页未读,继续阅读
282 浏览量
142 浏览量
357 浏览量
236 浏览量
390 浏览量
637 浏览量
2021-10-06 上传

yinxiaowei823
- 粉丝: 0
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- MSADS_Portfolio
- Arduino-FOC:用于BLDC和步进电机的Arduino FOC-基于Arduino的磁场定向控制算法库
- TestePraticoDDD:使用受DDD(域驱动设计)实践支配的结构测试项目
- react-number-format:React组件以将数字格式化为输入形式或文本形式
- 鼠标经过图片显示文字介绍代码
- 蓝色简洁企业介绍品牌宣传PPT模板
- DETR.detectron2:基于detectron2的DETR实现
- Algorithm-GoogleCodeJam-2015.zip
- StepperDriver:用于A4988,DRV8825,DRV8834,DRV8880和通用两针(DIRSTEP)步进电机驱动器的Arduino库
- RxAnimatedCarthageExample
- 逗比测试HTML5游戏源码
- HTextView:动画效果为文本,不是真正的textview
- Flarum - PHP编写的漂亮、优雅、简洁的轻论坛.zip
- 噪音控制技术.zip
- HTML5实现的全屏图片展示效果
- Web开发问题
