深度学习驱动的单图像超分辨率:CVPR方法与创新
下载需积分: 46 | PDF格式 | 2.07MB |
更新于2024-09-11
| 129 浏览量 | 举报
"CVPR图像超分辨率"是计算机视觉领域的一个重要研究方向,主要关注如何利用深度学习技术提升图像的细节质量和清晰度,尤其是在单张图像的高分辨率重建上。该论文由Chao Dong、Chen Change Loy、Kaiming He和Xiaoou Tang等研究人员提出,他们提出了一种深度卷积神经网络(Deep Convolutional Neural Network,DCNN)方法来处理这一问题。
在传统图像超分辨率(Single Image Super-Resolution,SISR)方法中,通常依赖于稀疏编码或者基于分解的技术,这些方法可能需要对图像的不同特征进行逐个处理。然而,这篇论文提出的方法则完全不同,它通过构建一个端到端的深度学习模型,将低分辨率图像作为输入,直接学习并生成高分辨率的输出。这种方法的优势在于能够联合优化所有层,从而提高整体性能。
论文的核心贡献在于设计了一种轻量级的深度卷积网络结构,这种网络在保持高恢复质量的同时,实现了较快的实时处理速度,适合于实际应用中的在线使用。作者通过探索不同的网络结构和参数设置,成功地实现了性能与速度之间的平衡,使得方法既能在复杂场景下保持良好的效果,又能在实时性方面满足需求。
此外,该研究还扩展了他们的网络架构,使其能够同时处理三通道的彩色图像,这进一步增强了图像的复原质量,尤其是在处理颜色丰富的场景时,显示出更好的整体重建能力。因此,该工作不仅推动了图像超分辨率技术的发展,也为实际图像处理应用提供了一个有效且高效的解决方案。
"CVPR图像超分辨率"这一研究展示了深度学习在图像处理领域的强大潜力,通过创新的网络设计和优化策略,它在提高图像质量的同时,兼顾了计算效率,对于提升图像处理技术的整体水平具有重要意义。
of them has analyzed the SR performance of different chan-
nels, and the necessity of recovering all three channels.
2.2 Convolutional Neural Networks (CNN)
Convolutional neural networks date back decades [26] and
deep CNNs have recently shown an explosive popularity
partially due to its success in image classification [18], [25].
They have also been successfully applied to other computer
vision fields, such as object detection [33], [50], face recogni-
tion [38], and pedestrian detection [34]. Several factors are
of central importance in this progress: (i) the efficient train-
ing implementation on modern powerful GPUs [25], (ii) the
proposal of the rectified linear unit (ReLU) [32] which
makes convergence much faster while still presents good
quality [25], and (iii) the easy access to an abundance of
data (like ImageNet [9]) for training larger models. Our
method also benefits from these progresses.
2.3 Deep Learning for Image Restoration
There have been a few studies of using deep learning tech-
niques for image restoration. The multi-layer perceptron
(MLP), whose all layers are fully-connected (in contrast to
convolutional), is applied for natural image denoising [3]
and post-deblurring denoising [35]. More closely related to
our work, the convolutional neural network is applied for
natural image denoising [21] and removing noisy patterns
(dirt/rain) [12]. These restoration problems are more or less
denoising-driven. Cui et al. [5] propose to embed auto-
encoder networks in their super-resolution pipeline under
the notion internal example-based approach [16]. The deep
model is not specifically designed to be an end-to-end solu-
tion, since each layer of the cascade requires independent
optimization of the self-similarity search process and the
auto-encoder. On the contrary, the proposed SRCNN opti-
mizes an end-to-end mapping. Further, the SRCNN is faster
at speed. It is not only a quantitatively superior method, but
also a practically useful one.
3CONVOLUTIONAL NEURAL NETWORKS FOR
SUPER-RESOLUTION
3.1 Formulation
Consider a single low-resolution image, we first upscale it to
the desired size using bicubic interpolation, which is the
only pre-processing we perform.
3
Let us denote the interpo-
lated image as Y. Our goal is to recover from Y an image
F ðYÞ that is as similar as possible to the ground truth high-
resolution image X. For the ease of presentation, we still call
Y a “low-resolution” image, although it has the same size as
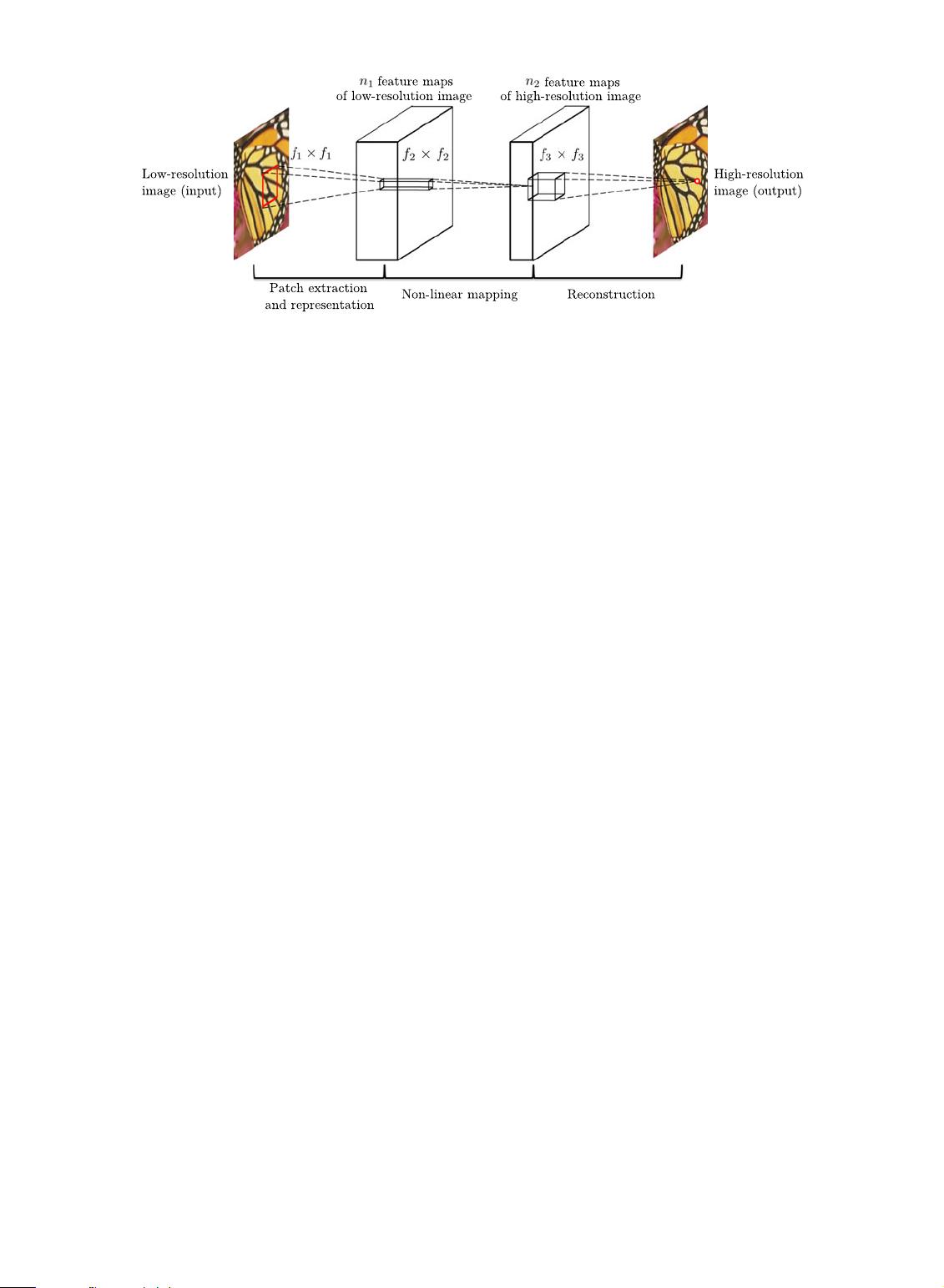
X. We wish to learn a mapping F, which conceptually con-
sists of three operations:
1) Patch extraction and representation. this operation
extracts (overlapping) patches from the low-resolu-
tion image Y and represents each patch as a high-
dimensional vector. These vectors comprise a set of
feature maps, of which the number equals to the
dimensionality of the vectors.
2) Non-linear mapping. this operation nonlinearly maps
each high-dimensional vector onto another high-
dimensional vector. Each mapped vector is concep-
tually the representation of a high-resolution patch.
These vectors comprise another set of feature maps.
3) Reconstruction. this operation aggregates the above
high-resolution patch-wise representations to gener-
ate the final high-resolution image. This image is
expected to be similar to the ground truth X.
We will show th at all these operations form a convolu-
tional neural network. An overview of the network is
depicted in Fig. 2. Next we detail our definition of each
operation.
3.1.1 Patch Extraction and Representation
A popular strategy in image restoration (e.g., [1]) is to
densely extract patches and then represent them by a set of
pre-trained bases such as PCA, DCT, Haar, etc. This is
equivalent to convolving the image by a set of filters, each
of which is a basis. In our formulation, we involve the opti-
mization of these bases into the optimization of the network.
Formally, our first layer is expressed as an operation F
1
:
F
1
ðYÞ¼max 0;W
1
Y þ B
1
ðÞ; (1)
Fig. 2. Given a low-resolution image Y, the first convolutional layer of the SRCNN extracts a set of feature maps. The second layer maps these
feature maps nonlinearly to high-resolution patch representations. The last layer combines the predictions within a spatial neighbourhood to produce
the final high-resolution image F ðYÞ.
3. Bicubic interpolation is also a convolutional operation, so it can be
formulated as a convolutional layer. However, the output size of this
layer is larger than the input size, so there is a fractional stride. To take
advantage of the popular well-optimized implementations such as
cuda-convnet [25], we exclude this “layer” from learning.
DONG ET AL.: IMAGE SUPER-RESOLUTION USING DEEP CONVOLUTIONAL NETWORKS 297
剩余12页未读,继续阅读
相关推荐

257 浏览量




qq_33691974
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- jdk-7u80-windows-x64.exe
- CRM成功的十大秘诀DOC
- InsectDefense
- ProClub:2015-2016年霍姆斯特德高中编程俱乐部工作坊资料
- cryptmount:Linux加密文件系统管理工具-开源
- Zadania-Informatyka
- cards_test_task
- 三菱PLC通过三菱控件与PC交互
- 留住客户还不够
- tv-remote-control:在浏览器上运行的电视遥控模拟器
- python-utils:在Keboola Connection环境中运行的Python应用程序的实用程序库
- 数据库世界:CS340网站数据库
- cpu环境下可运行的骨骼序列行为识别的代码
- IFCX-开源
- st-tutorial.github.io
- DeliveryTracker:大韩民国的快递服务跟踪器写在Rust中
