MLP-3D网络:无卷积的视频识别新方法
128 浏览量
更新于2024-06-20
收藏 970KB PDF 举报
"本文介绍了一种名为MLP-3D的新型三维视频识别网络,它采用了无卷积的多层感知器(MLP)结构,旨在处理视频数据的复杂性和变化性。MLP-3D网络由MLP-3D块构成,每个块包括令牌混合MLP和信道MLP,通过引入分组时间混合(GTM)操作来增强时间序列的建模能力。GTM将输入令牌按时间分组,并用共享投影矩阵进行线性映射。研究者设计了不同分组策略的GTM变体,并通过结构搜索将它们集成到MLP-3D网络的不同块中。尽管计算效率较高,但该网络在Something-SomethingV2和Kinetics-400数据集上的性能与广泛采用的3DCNN和视频变压器相当,实现了68.5%和81.4%的top-1准确率。"
在计算机视觉领域,卷积神经网络(CNN)长期被视为图像和视频识别的主流模型,因其在多个任务上的优异表现以及硬件优化的实现。然而,随着注意力模型在自然语言处理中的成功,视觉转换器(如Transformer)也开始在视觉领域受到关注。MLP-3D网络则是结合了这两种思想,特别是在处理视频数据时,它试图克服CNN和Transformer的局限性。
MLP-3D网络的设计灵感来源于MLP混合器层,但进行了改进,将其分解为沿高度、宽度和时间三个维度的子模块。核心创新在于令牌混合MLP的改进,通过GTM操作,它能够捕捉到视频数据的时间动态。GTM不仅分组了输入令牌,还引入了线性投影,使得每个时间组内的令牌可以进行交互,从而增强网络对时间序列的理解。
为了进一步优化网络性能,研究者探索了多种GTM的分组策略,并利用贪婪结构搜索方法来确定最佳组合,将这些变体整合到MLP-3D的不同块中。这使得网络能够在保持高效计算的同时,仍然能够有效地学习和捕获视频数据的时空特征。
实验结果显示,MLP-3D网络在Something-SomethingV2和Kinetics-400这两个标准视频识别数据集上取得了与当前最先进的3DCNN和Transformer相当的性能。这表明,即使没有依赖传统的卷积或注意力机制,MLP-3D网络也能有效处理视频识别任务,为视频理解和分析提供了新的视角和可能。
3064
× ×
×
×
∈
O
O
4
S
4
4
32
32
4
×
×
∈
视频
小块
阶段
1
MLP-3D
阶段
2
MLP-3D
阶段
3
MLP-3D
阶段
4
MLP-3D
平均
夹
嵌入
块x L
1
区块x
L2
Block x
L3
Block x
L4
池化
类数
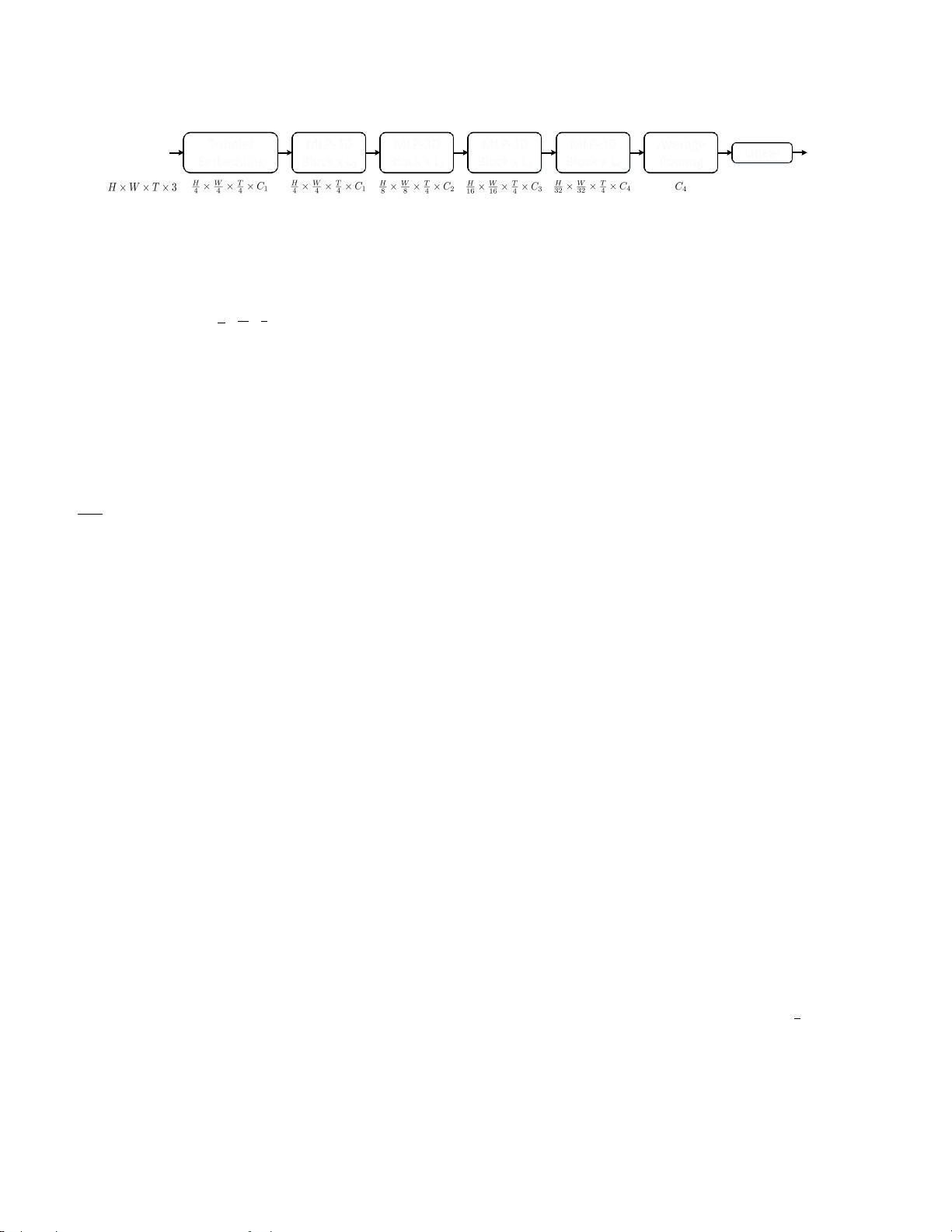
图2.我们提出的MLP-3D网络的概述。
C
i
和
L
i
分别
表示第i级中的输出声道的数量和
MLP-3D块
的重复数量
。输出特征图的大小也
为每个块给出。
宽度和剪辑长度,我们的模型首先嵌入重叠tubelets与
窗口大小
7 7 4
和步幅
4 4 4
。通过使用共享的线性嵌入
层,每个tubelet被映射到具有更高维度
C1
因此,整个小
块嵌入模块产生具有
H
×
W
×
T
×
C1
形状的特征。
MLP-3D块在视频识别中选择沿时间轴而不是通道轴混
合。这种设计与3D卷积分解[46,59,68]和时空分割
注意力[1,3]具有相似的精神。
具体地,分解到
ken
混合
的
输出
Y
通过线性投影token
多级架构。 然后,沿着三个维度的顺序MLP
图2中所示的3D块被应用于小块令牌。整个MLP-3D网
络包括四个阶段,
Y
=
FC
(
X
H
+X
W
+X
T
)
、
(
2
)
并且在每个级内保持特征分辨率。在两个相邻的级之
间插入一个级过渡,这增加了通道的数量并降低了空
间分辨率。这样,来自最后一个阶段的令牌的数量是
HWT
。最后,将生成的令牌沿空间和时间维度进行平
均,然后是用于类预测的全连接层。
3.2.
MLP-3D模块
所提出的MLP-3D块源自MLP混合器[54]中的基于
MLP的块,其通过令牌混合MLP来替换Transformer中
的多头自注意模块。详细地,基于MLP的块由两个组
件 组 成 : 信 道 MLP 和 令 牌 混 合 MLP 。 MLP 利 用 了
Transformer [60]中前馈层的类似结构,其中包含两个
线性层以及其间的GELU [15]非线性。标记混合MLP
混合来自不同空间/时间位置的标记的信息,并表征各
种基于MLP的模型之间的主要差异[6,17,54,70]。
具体地,给定输入令牌X,基于MLP的块的函数可以
被公式化为:
Y
=
令牌混合
-MLP
(
LN
(
X
))
+
X
,
(
1
)
Z=MLP
(
LN
(
Y
))
+Y
,
其中LN表示层范数[2]。输出Z用作下一个块的输入,
直到最后一个块。
分解令牌混合。令牌混合MLP的目标是通过混合不
同令牌的信息来捕获空间/时间模式。受视觉变换器[17]
的启发,MLP-3D块分解令牌混合MLP并一次沿一个
轴编码信息。通过这样做,令牌混合MLP可以捕获沿
一个维度的长程依赖性,同时保留沿其他维度的精确
位置信息。与[ 17 ]不同,[17 ]通过图像
其中X
H
、X
W
和X
T
分别是高度、宽度和时间混合的输
出。FC表示全连接层。在这里,我们利用[17]中提出
的加权求和来聚合不同混合操作的输出。对于高度/宽
度混合操作,我们选择[6]中的循环FC,这已被证明对
捕获空间上下文是
3.3.
分组时间混合(GTM)
为了进一步提高令牌混合MLP的效率,我们提出了
一种新的分组时间混合(GTM)操作,以产生方程中
的
X
T
(2)在时间维度上对令牌间形式上,我们从分
析最简单的时间混合开始,它线性映射不同时间点的
所有标记的特征更具体地说,
给定
kens
的重新
整形输
入为
X
R
H
W
×
T C
,全
时混频的输出计算为
X
T
=
X
·
W
,
(
3
)
其中WR
TC×TC
是投影矩阵。 虽然 该操作可以捕获沿
时 间 轴 的 大 范 围 相 关 性 , 它 要 求 计 算 复 杂 度
(HWT
2C2
)和参数数目(
T2C2
)随剪辑长度T的增加
呈几何级数增长。
为了缓解这一限制,我们设计了分组时间混合操
作,它将输入令牌分成几个时间组,并将每组中的令
牌与共享的投影参数进行映射。因此,计算的复杂性
和参数的数量减少,因为组的大小通常比剪辑长度小
得多。为了实现这一想法,我们推导出四种不同的
GTM操作,如图3所示,它们对应于令牌组的不同构
造。我们详细比较了以下操作:
(1)
短程GTM 第一种设计将令牌均匀地分成
T
个组,
其中S是组大小(即,的
线性
剩余14页未读,继续阅读
2020-06-11 上传
2021-05-25 上传
2024-06-18 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
