构建ROSCAR-TIANBOTRACER环境:LINUX虚拟机安装教程
需积分: 5 25 浏览量
更新于2024-06-15
收藏 5.97MB DOCX 举报
本篇文章主要介绍了如何在虚拟机中使用VirtualBox搭建ROSCAR-TIANBOTRACER开发环境,特别是在Ubuntu Linux系统上的详细步骤。以下是关键知识点的详细说明:
1. **虚拟机环境准备**:
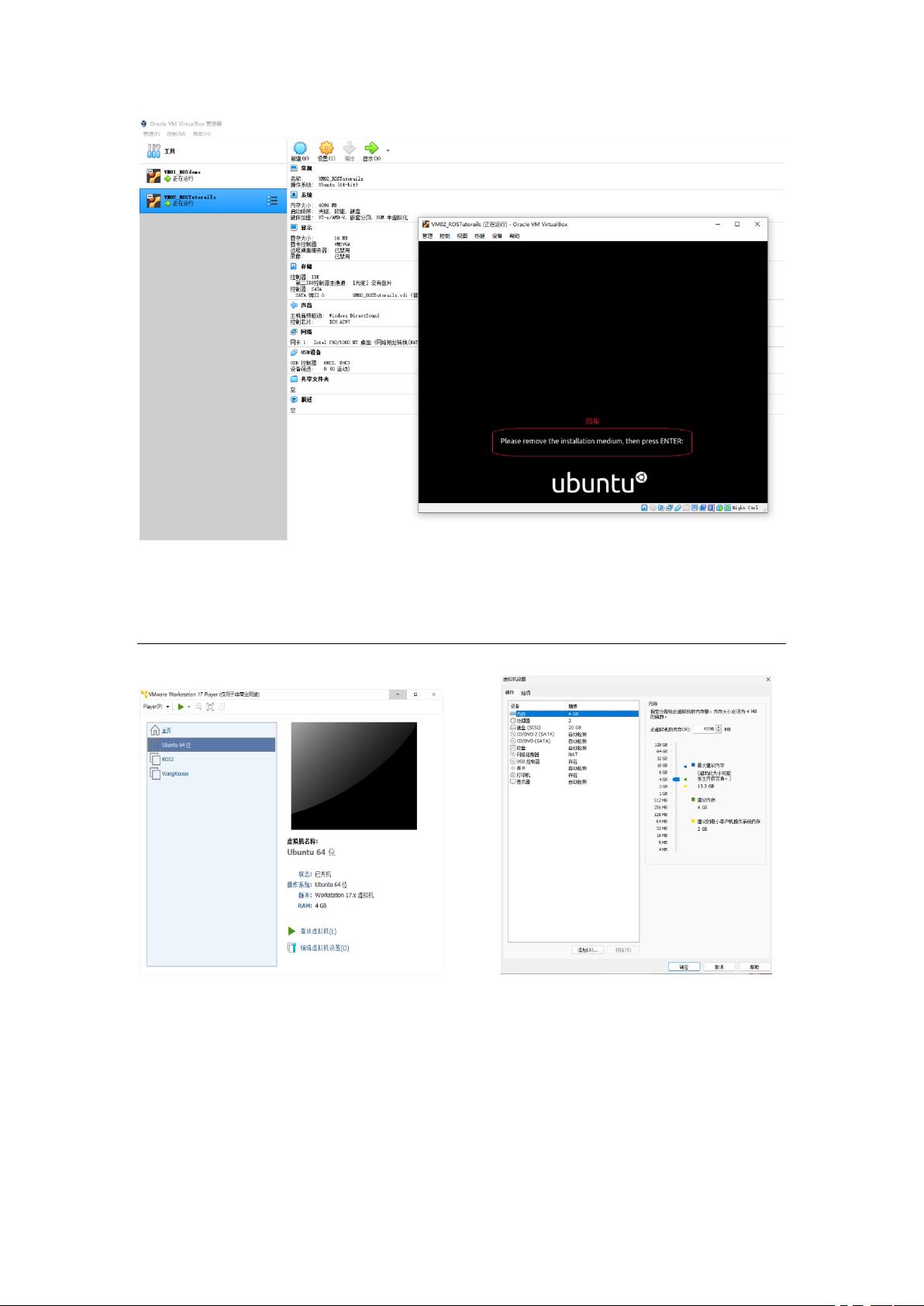
- 首先,创建一个新的Linux系统,推荐使用Ubuntu 20.04版本,因为ROS(Robot Operating System)通常与该版本兼容。系统需分配足够的资源,如4096MB内存和60GB磁盘空间,以确保性能稳定。
- 在选择磁盘时,建议使用虚拟机中的磁盘,其他配置保持默认,使用单个CPU核心。
- 将ROS镜像文件关联到虚拟机,通过VirtualBox的设置——存储——磁盘选择来进行。启动系统后,根据提示进行常规的键盘布局设置、安装类型选择(全新安装),并设置正确的时区。
2. **VMware Player的优化**:
- 对于使用VMware Player的用户,安装虚拟机工具可以提高性能。启用文件交换模式有助于数据交换,同时安装VMware的扩展插件,以实现窗口大小的自动调整和鼠标右键菜单的定制。
3. **安装ROS**:
- 在Ubuntu系统中,为安装未经认证的软件打开权限,这可以通过“软件和更新”对话框完成,确保选择了"restricted"、"universe"和"multiverse"源。
- 安装ROS官方源,使用命令`sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros-latest.list'`。如果国内访问速度较慢,可以考虑使用清华大学的镜像源进行替换。
4. **额外设置**:
- 为了优化用户体验,如鼠标右键菜单中添加新建文档选项,可以在主目录下的模板目录创建一个空文本文档,并使用gedit编辑器进行设置。
本文提供了从头开始搭建ROSCAR-TIANBOTRACER环境在Ubuntu虚拟机中的详细步骤,包括硬件配置、操作系统安装优化以及ROS的具体安装设置。对于从事机器人开发或对ROS感兴趣的开发者来说,这是一个必备的指导教程。
进入后,登陆一下,即可。
如果使用 VM Player,操作步骤会更加简单一点,设置如下
-------------------------------------------------------------------------------
使用优化:安装虚拟机工具,启动文件交换模式,安装扩展插件
先去 virtualbox 官网下载扩展包,在 virtual box 中添加扩展工具。
剩余23页未读,继续阅读
2021-01-06 上传
2022-08-03 上传
2024-11-14 上传

WanGxxxx.
- 粉丝: 3130
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
