Canny边缘检测算法详解:噪声抑制与边缘定位
需积分: 50 35 浏览量
更新于2024-07-24
收藏 1.92MB PPT 举报
"Canny算子是一种经典的边缘检测算法,由John Canny在1986年的IEEE Transactions on PAMI上提出。它以其高效的边缘检测性能、良好的定位准确性和较低的误检率而被广泛使用。Canny算子通过一系列步骤来识别图像中的边缘,这些步骤包括图像预处理、计算梯度、非极大值抑制和双阈值检测。
1. **图像预处理**:Canny算子通常先对图像进行高斯滤波,以去除图像中的噪声。高斯滤波器是一个线性平滑滤波器,能够有效地降低图像的高频噪声,同时保持边缘信息。
2. **计算图像梯度**:接着,使用高斯函数的一阶导数来计算图像的梯度幅度和方向。梯度幅度表示图像亮度变化的程度,梯度方向则指示了这种变化的方向。这一步骤是边缘检测的关键,因为边缘通常对应于图像亮度的快速变化区域。
高斯函数的一阶导数可以近似地满足边缘检测的三个最优准则:
- **好的边缘检测性能**:确保在边缘处的响应强于噪声。
- **好的定位性能**:确保边缘检测的最大值靠近实际边缘位置。
- **低的错误检测率**:避免在非边缘区域出现过多的极大值点。
3. **非极大值抑制**(Non-Maxima Suppression, NMS):这一步是为了消除边缘检测过程中可能产生的多峰现象,确保每个边缘只对应一个峰值。通过比较当前像素点与其邻域内像素的梯度幅度,抑制那些不是局部最大值的点,使得边缘更加清晰。
4. **双阈值检测**:设置两个阈值,小阈值用于初步检测边缘,大阈值用于确认边缘。低于小阈值的像素点被视为噪声,高于大阈值的点被确认为边缘,介于两者之间的点需要通过连接分析来决定是否属于边缘。
5. **边缘连接**:将孤立的边缘点连接成连续的边缘,形成完整的边缘轮廓。
Canny算子的优点在于其全面性和准确性,但也有一定的计算复杂性,特别是在处理大尺寸图像时。尽管如此,由于其优良的性能,Canny算子仍然是许多计算机视觉应用中首选的边缘检测算法之一。"
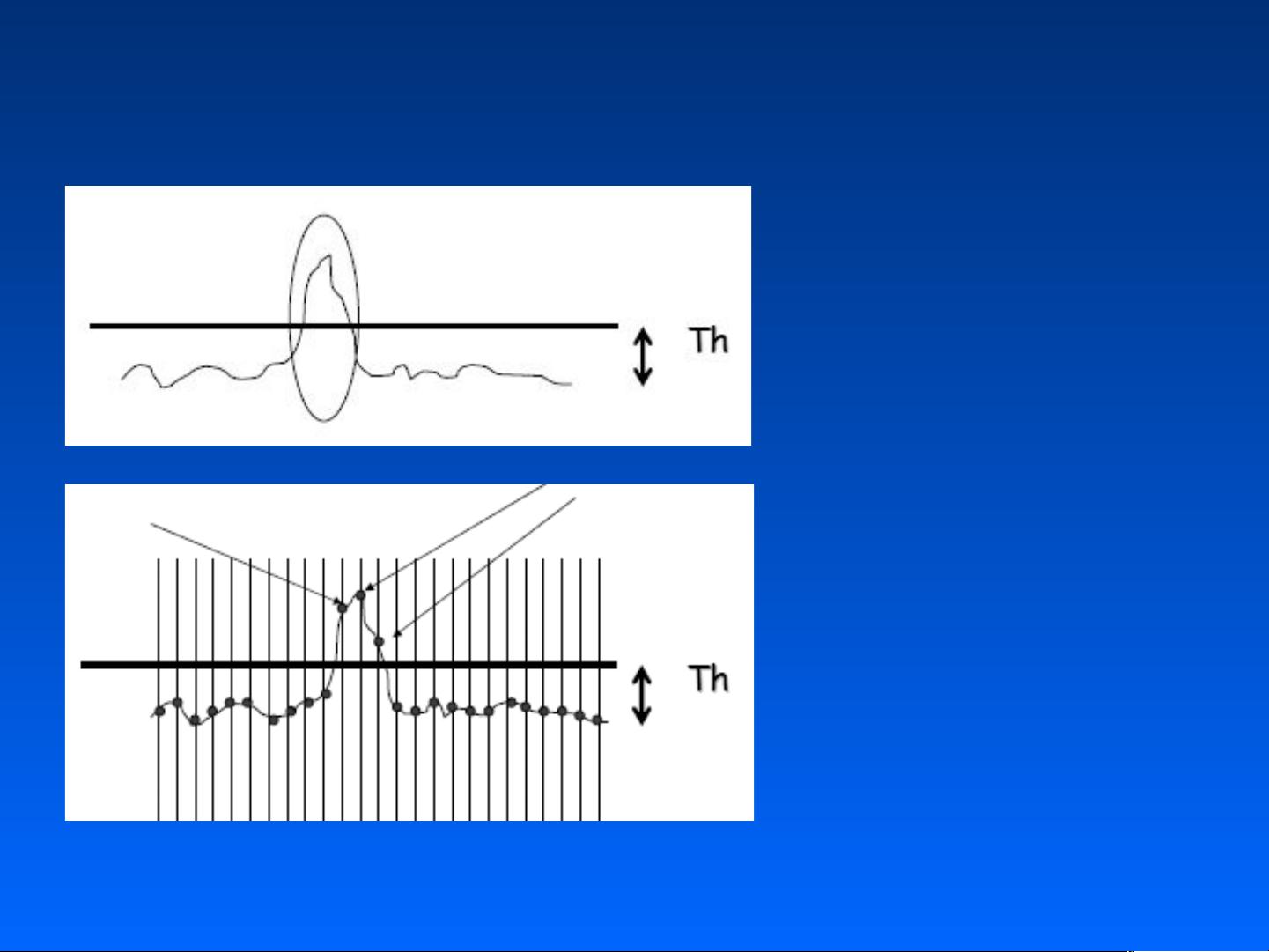
如何检测边缘?
局部极值周围存在相近数
值的点

剩余37页未读,继续阅读
3656 浏览量
285 浏览量
183 浏览量
143 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
106 浏览量
405 浏览量

lz123zxc
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- FonePaw_Video_Converter_Ultimate_2.9.0.93447.zip
- 162100头像截图程序 4.1
- subclass-dance-party
- JavaScript:Curso完成JavaScript
- Medical_Payment_Classification:确定医疗付款是用于研究目的还是用于一般用途
- P1
- javascript-koans
- 保险行业培训资料:寿险意义与功用完整版本
- ChandyMishraHaasOrAlgo
- maven-repo
- react-as-space
- eclipse-inst-mac64.dmg.zip
- bearsunday.github.io
- ks
- lazytoby.github.io
- 0.96寸OLED(IIC接口)显示屏的图像显示应用
