串行通信模式与异步通信方式解析
"s3c2440的串口通信"
串口通信是电子和计算机领域中常见的一种数据传输方式,尤其在嵌入式系统中,如s3c2440这样的微处理器中,串口通信扮演着重要的角色。串行接口的基本原理是将数据一位一位地进行传输,与并行通信相比,它需要更少的传输线,成本更低,适合远距离传输。串行通信的时间消耗与数据位数成正比,例如,n位数据在串行通信中至少需要n倍的时间。
串行数据通信有三种基本模式:单工、半双工和全双工。单工通信只允许数据单向流动,从设备A到设备B;半双工通信则支持双向传输,但不能同时进行;全双工通信允许数据同时双向传输,提高了通信效率。
串行通信方式主要分为同步和异步两种。同步通信中,数据以固定的时间间隔发送,整个数据包(如起始位、数据位、校验位和停止位)作为一个整体同步传输。而在异步通信中,数据帧之间的时间间隔是不固定的,每帧数据包含起始位、数据位、奇偶校验位和停止位,数据帧间的同步依赖于起始位。
异步通信的特点包括字符格式、波特率和校验位的设定。字符格式规定了每个字符前后的起始位和停止位,以及可能的奇偶校验位。波特率定义了每秒传输的位数,如1200波特表示每秒传输1200位数据。校验位用于检测数据传输过程中的错误,通过计算字节中的“1”位数来确保数据的完整性,常见的校验方式有奇校验和偶校验。
在实际应用中,s3c2440这样的微处理器通常会配置多个串行通信接口(如UART),以支持不同外设的连接。这些接口可以配置波特率、数据位数、校验位和停止位,以适应不同的异步通信需求。配置完成后,通过编程控制串口发送和接收数据,实现设备之间的通信。
串口通信在嵌入式系统中广泛使用,特别是在s3c2440这样的微控制器中,它提供了一种高效、低成本的远距离数据传输解决方案。理解串行接口的基本原理、通信模式和异步通信的细节,对于设计和调试基于s3c2440的系统至关重要。

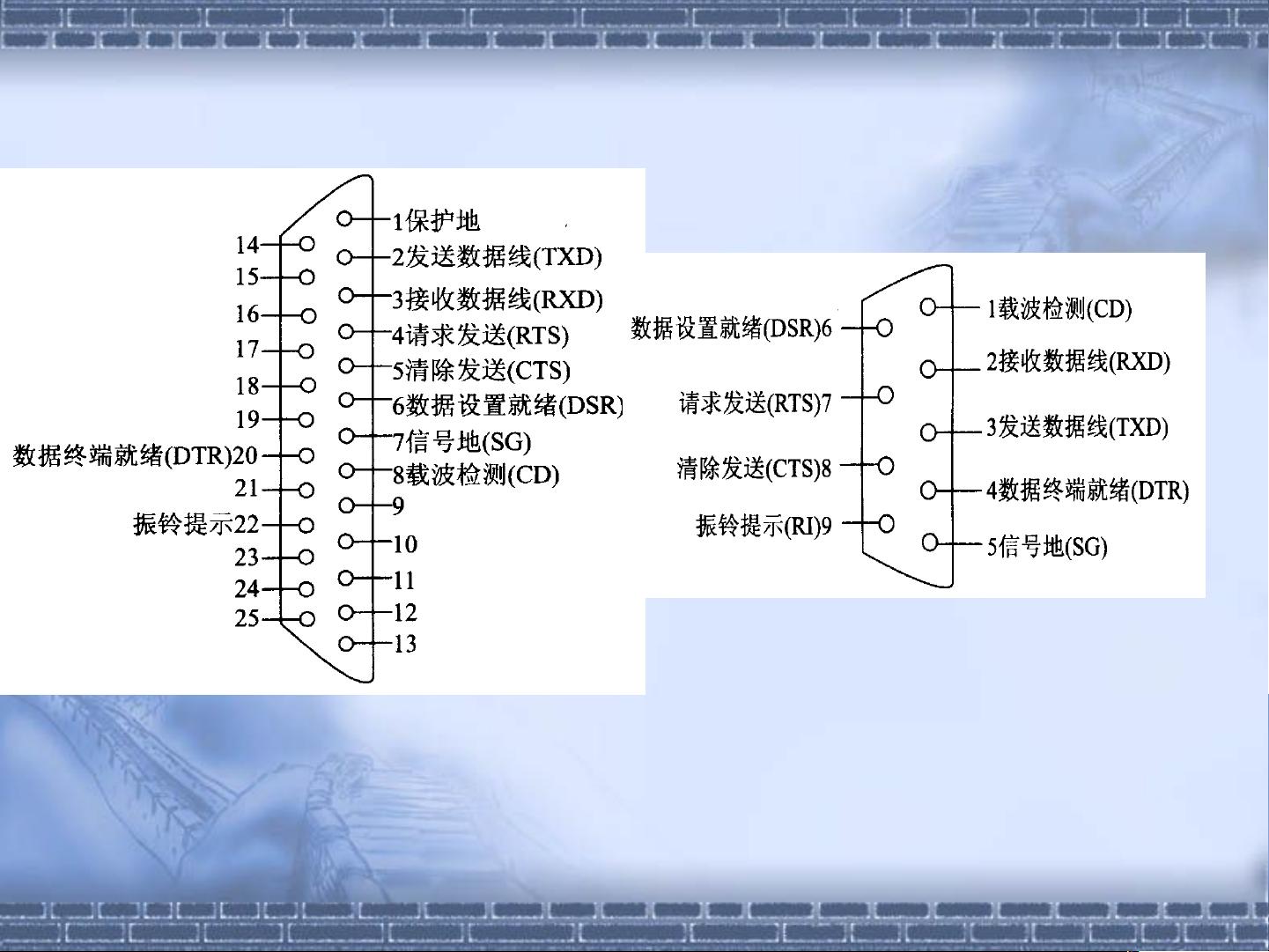
● RTS 请求发送。此引脚由计算机来控制,用以通知 Modem 马上传送
数据至计算机;否则, Modem 将收到的数据暂时放人缓冲区中。
● CTS 清除发送。此引脚由 Modem 控制,用以通知计算机将要传送的
数据送至 Mo-dem 。
● RI :振铃提示。 Modem 通知计算机有呼叫进来,是否接听呼叫由计
算机决定。
剩余47页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-09-20 上传
2022-09-22 上传
2022-09-24 上传
2022-09-19 上传
261 浏览量
2022-09-21 上传

Danile.Li
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- eclipse中文教程
- excelvba设计教程
- 网络协议分类大全 图解
- 存储--基础知识(090202)(1)
- AutoCAD快捷键大全.txt
- 悟透javascript
- 西门子通用型变频器工程师手册
- CC++bianchengguifan.pdf
- PHP与MySQL WEB开发(第四版)(En).pdf
- oracle帮助文档
- 企业员工通讯录管理系统
- Struts_in_Action中文版
- Cambridge.Press.Security.and.Quality.of.Service.in.Ad.Hoc.Wireless.Networks.
- Oracle10g安装、升级、卸载和使用
- mysql-4th-edition-developers-library
- 企业人事管理系统的设计与实现
