深度学习下StereoVision算法与应用详解
需积分: 49 72 浏览量
更新于2024-07-20
收藏 51.61MB PDF 举报
《立体视觉:算法与应用》是由Stefano Mattoccia撰写的一份详尽的200多页PDF资料,主要关注于立体视觉这一领域。作者是来自意大利博洛尼亚大学计算机科学系DISI的Stefano Mattoccia,他的邮箱地址为stefano.mattoccia@unibo.it,可在网站www.vision.deis.unibo.it/smatt获取更多信息。
该文档的更新历史表明,作者持续关注并分享了立体视觉技术的最新进展。早期版本包括对线性立体匹配(ICCV 2011)、Minetal算法(同样在ICCV 2011)、快速分割驱动(FSD)算法的实验结果以及结构光匹配(SGM)的描述。此外,还有基于GPU的Fast Bilateral Stereo算法的实验成果,以及Vision Ststereocamera的性能展示。
2011年5月19日,作者加入了关于FBS在GPU上的应用结果,以及对更多论文的描述和实验数据,如[67]、[68]和[69]。在2010年4月20日,文档进一步包含了这些研究成果。Linux和Windows平台上Fast Bilateral Stereo算法的实现也在同年7月25日公开可用,链接为www.vision.deis.unibo.it/smatt/fast_bilateral_stereo.htm。
文档的主体部分分为两个主要部分:一是立体视觉的介绍,它涵盖了这个技术的基本概念、原理和理论基础,让读者对立体视觉有全面的认识;二是快速立体视觉算法的概述,这部分深入解析了如何通过计算方法处理和分析左右眼图像对,以实现深度感知和三维重建,包括但不限于匹配、分割、融合等关键步骤。
随着技术的发展,该文档不断更新,反映了立体视觉领域的前沿动态,适合对立体视觉技术感兴趣的研究人员、工程师和学生参考,无论是对于理论学习还是实践应用都有很高的价值。有兴趣者可访问http://www.vision.deis.unibo.it/smatt/Seminars/StereoVision.pdf获取最新版本。
Stefano Mattoccia
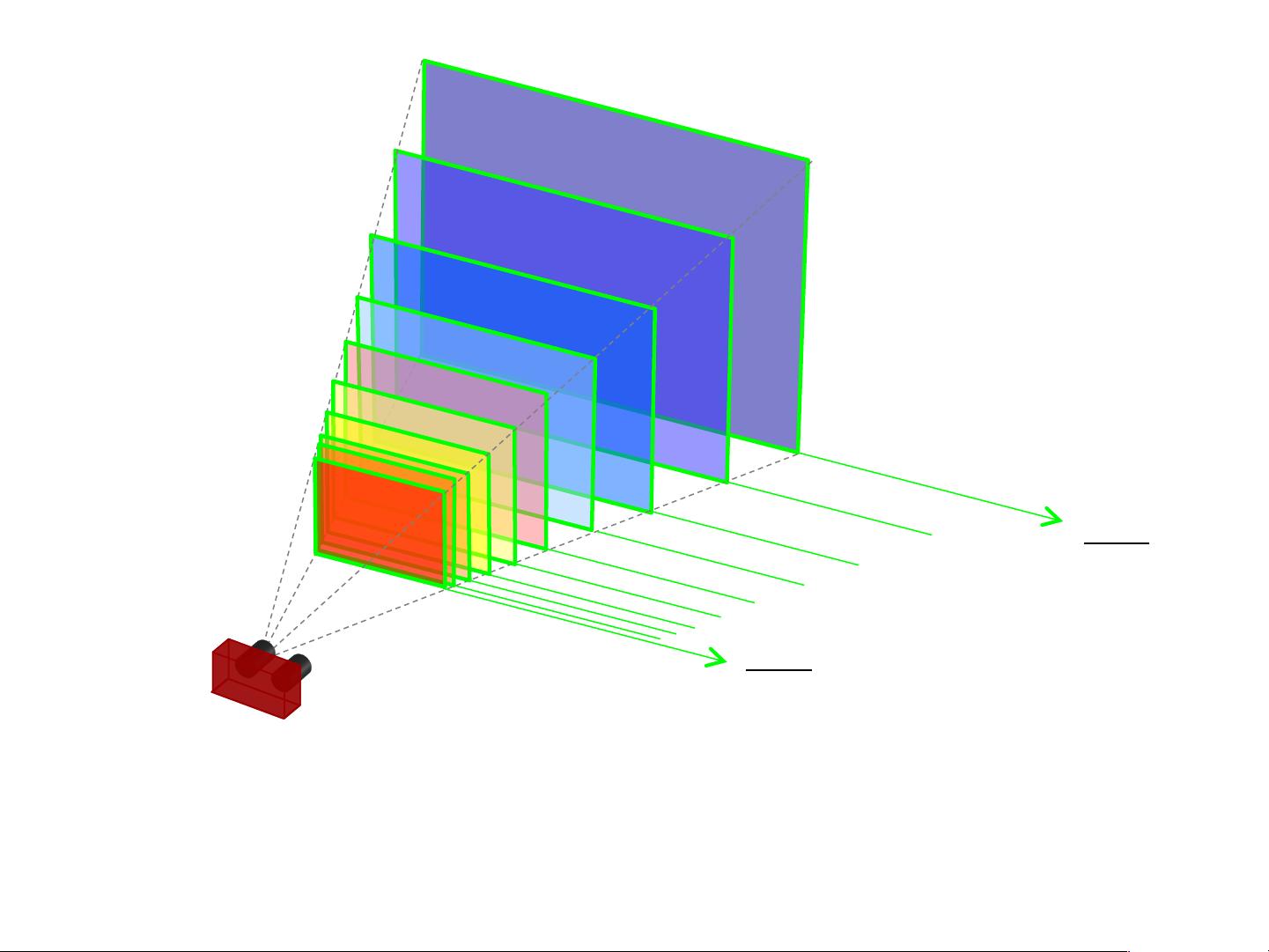
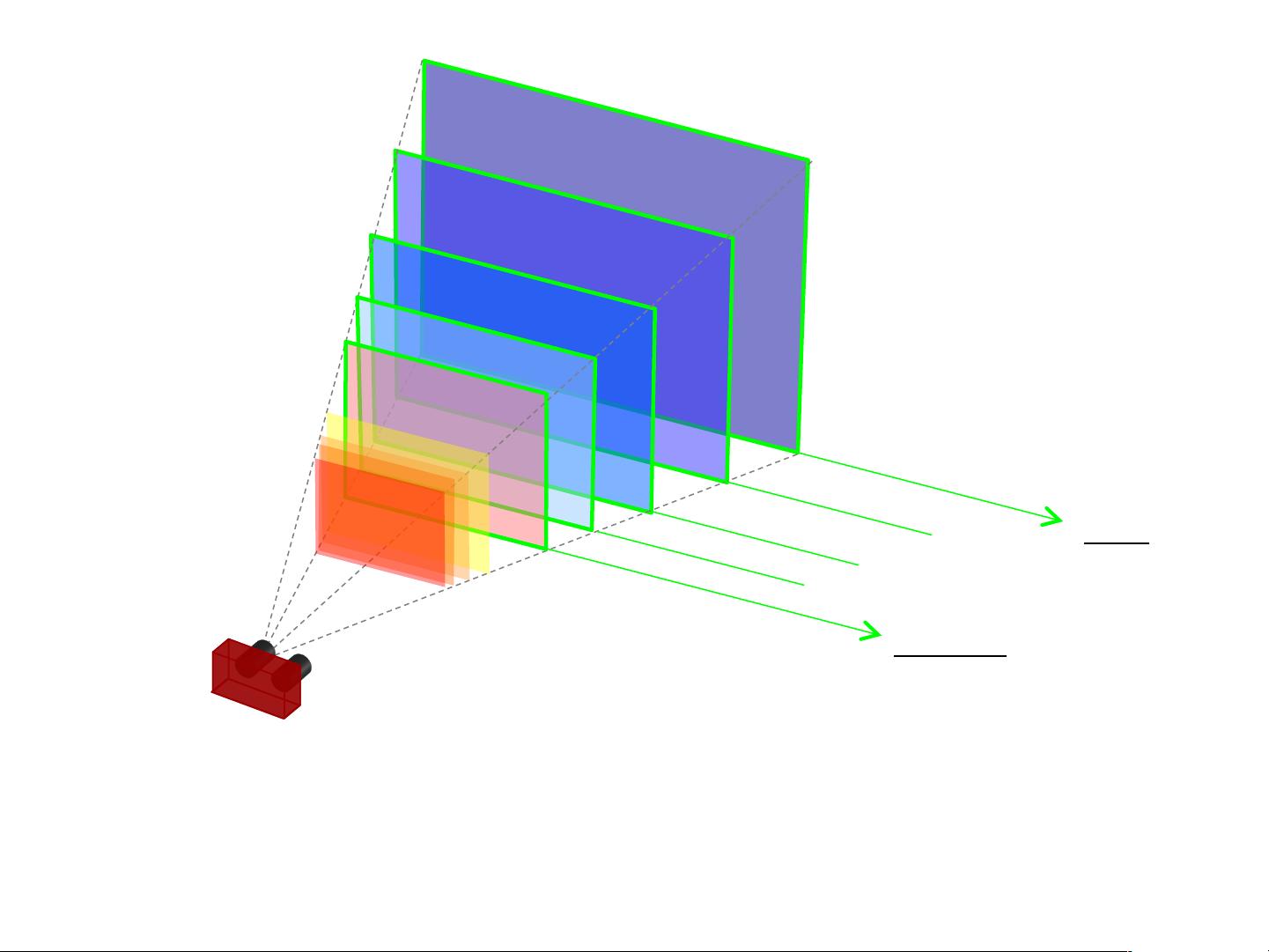
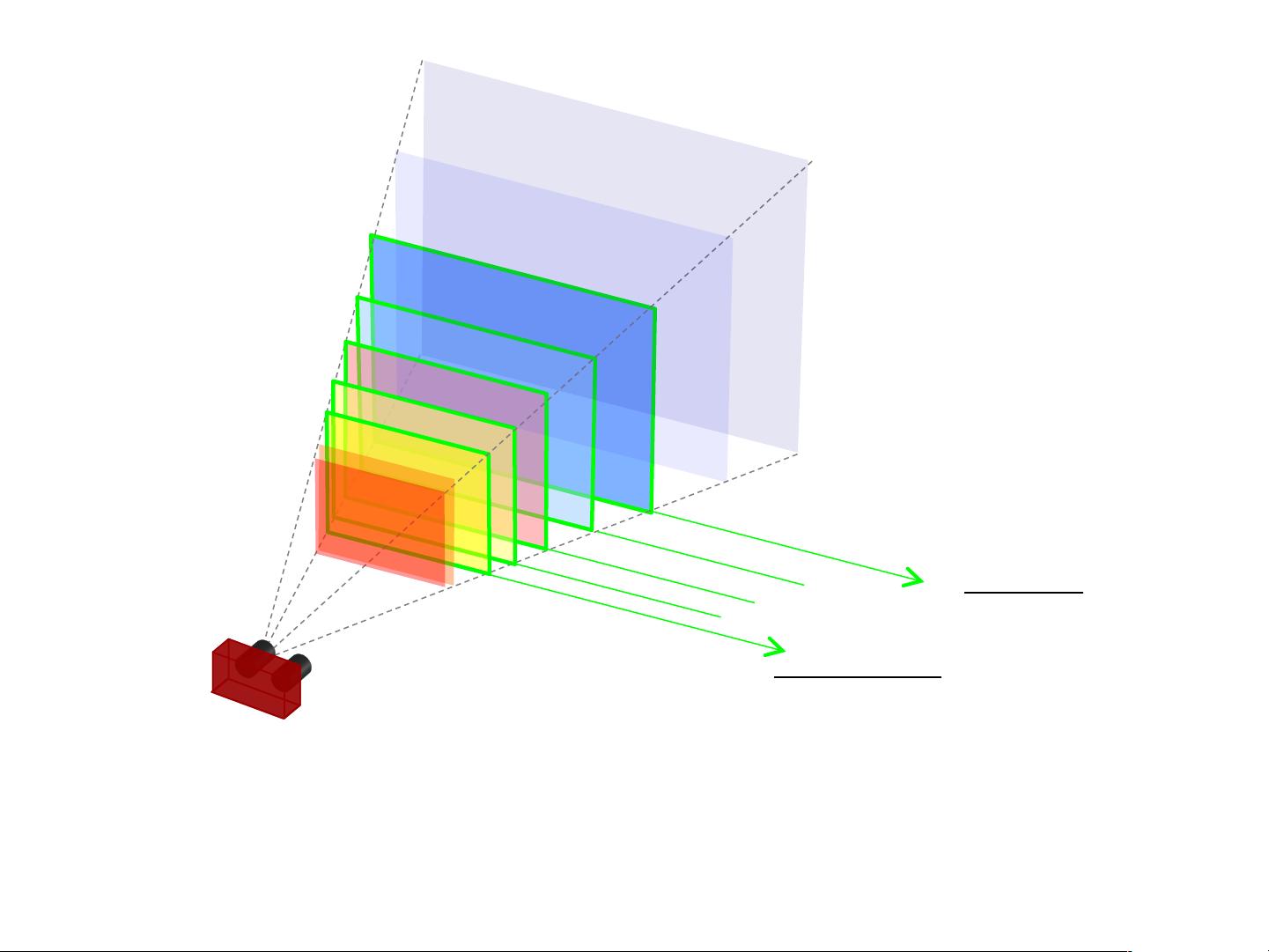
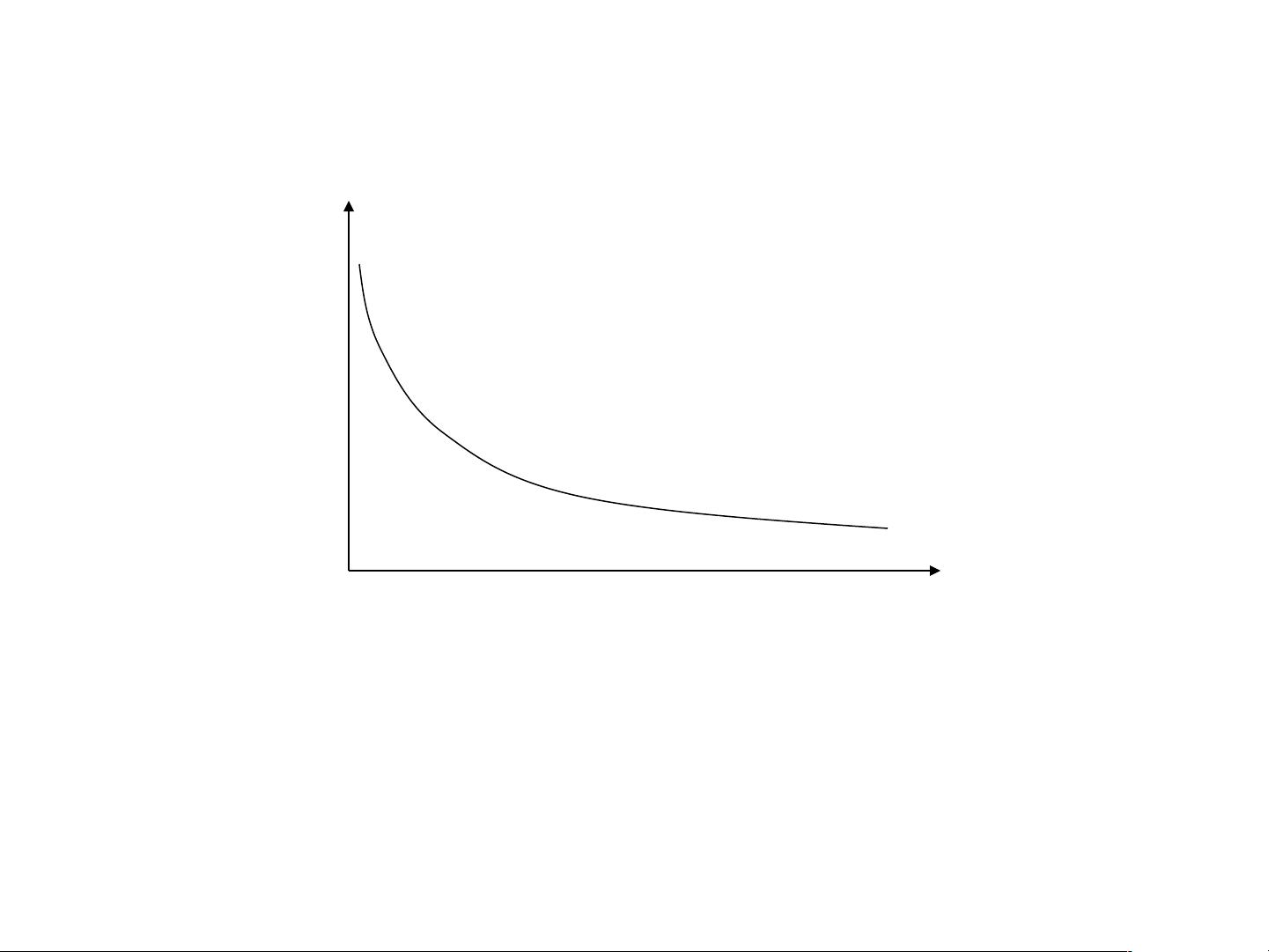
• Depth measured by a stereo vision system is discretized
into parallel planes (one for each disparity value)
• A better (virtual) discretization can be achieved with
subpixel techniques (see Disparity Refinements)
min
d
fb ⋅
max
d
fb ⋅

剩余207页未读,继续阅读
2021-09-29 上传
2022-07-15 上传
2016-04-02 上传
2012-03-07 上传
2015-09-17 上传
2021-09-30 上传
2021-08-11 上传
2009-08-07 上传
2021-07-24 上传

淺淺不憂愁
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
