AVR单片机控制的帆板自动调角系统
48 浏览量
更新于2024-08-31
1
收藏 197KB PDF 举报
"基于AVR单片机的帆板控制系统是一个采用闭环控制的自动化设备,主要目的是通过实时监测和调整帆板的角度,使其能够在不同风力条件下保持预设位置。系统利用AVR单片机作为核心处理器,结合角度传感器、LCD显示屏、电机驱动模块以及键盘模块等组件来实现这一目标。"
在该控制系统中,AVR单片机扮演着关键角色,它负责定时采集角度传感器的数据,并与预设的帆板转动角度进行比较。如果实际角度与预设角度有偏差,单片机会生成脉宽调制(PWM)信号来控制风扇电机的转速,进而改变风帆的角度。LCD显示屏则用来实时显示预置参数、当前帆板角度、PWM信号状态以及调控过程所需的时间,为操作员提供了直观的监控界面。
设计任务要求在风扇与帆板之间距离变化时,系统能够在规定时间内自动调整帆板至设定角度。为此,设计思路包括以下几个部分:
1. **控制模块**:采用AVR单片机,例如Atmel公司的ATmega系列,作为系统的核心,执行控制算法和数据处理。
2. **角度检测模块**:使用ADXL345三轴加速度计作为角度传感器,该传感器通过I2C接口与单片机通信,能提供高精度的角度数据。为解决风帆摆动不稳定的问题,采取了多次采样取平均值的方法。
3. **电机驱动模块**:L298电机驱动芯片用于控制风扇电机的正反转和转速,其输入接受来自单片机的逻辑信号,输出端则连接到风扇电机,通过PWM信号调节电机转速。
4. **显示模块**:LCD1602液晶模块用于显示帆板状态和控制参数,为用户提供可视化信息。
5. **电源模块**:采用LM2576开关型降压稳压芯片,为整个系统提供稳定的工作电压。
6. **键盘模块**:允许用户输入预置参数,调整帆板的目标角度。
7. **角度检测电路**:ADXL345传感器通过I2C接口与单片机通信,采集的角度数据经过处理后生成PWM信号。
8. **驱动电路**:L298驱动芯片的使能端通过隔离光耦接收单片机输出的PWM信号,从而控制电机的转速。
整个系统的运行流程是:AVR单片机定期读取ADXL345传感器的数据,计算角度差,然后生成相应的PWM信号,通过L298驱动风扇电机调整风帆角度,同时LCD1602显示屏实时更新显示信息。这样的设计使得系统具有较高的自动化水平和响应能力,能够适应动态环境下的帆板角度调节需求。
基于基于AVR单片机的帆板控制系统单片机的帆板控制系统
以AVR单片机为核心,采用闭环控制,角度传感器检测帆板的实际转动角度,单片机定时采集,与帆板预置参
数进行比较,生成调控风扇电机的PWM信号;用LCD屏显示预置参数、帆板的转动角度、调节用的PWM信号及
调控过程完成的时间等内容。
设计任务
设计并制作一个
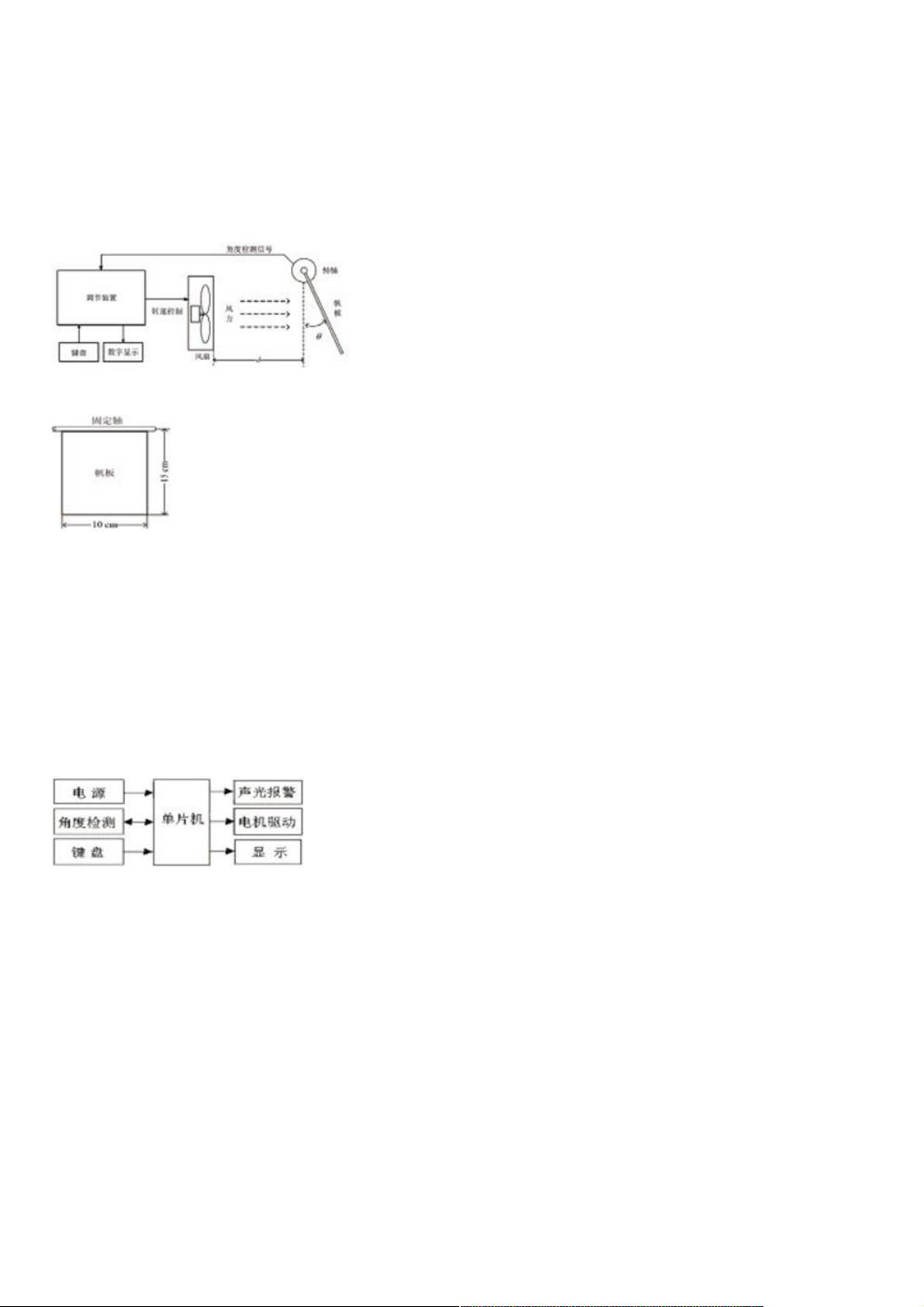
图1 帆板控制系统示意图
图2 帆板制作尺寸图
根据题目要求,设计任务要实现风扇和帆板之间的距离在一定范围内变动时,在规定的时间内,自动调节帆板达到通过键盘设
定的预置转角(下文简称:预置参数),同时对控制过程中的相关数据进行实时处理并显示。
设计思路:以
系统硬件设计与实现
硬件概述
系统由以下几个基本模块组成:电源模块、单片机控制模块、电机驱动模块、显示与声光报警模块、键盘模块和角度检测模
块。整个系统框图如图3所示。
图3 系统框图
(1)控制模块:采用AVR单片机控制;
(2)角度检测模块:采用ADXL345角度传感器;
(3)风扇类型:采用轴流式的电吹风风扇;
(4)电机驱动方式:采用L298电机驱动芯片;
(5)显示模块:用LCD1602液晶模块进行显示;
(6)电源模块:采用LM2576开关型降压稳压芯片。
角度检测电路
角度传感器选用三轴加速度计ADXL345。其输出数据为16位二进制补码格式,可通过SPI(3线或4线)或I2C数字接口访问。对
ADXL345的数据累计采样50次,取其平均值作为结果,这种方法成功的解决了风帆摆动不稳的难题。单片机依据该值大小与预置
参数运算,最后生成调节风扇电机转速的PWM信号。
ADXL345与单片机采用I2C模式通信,电路如图4所示。角度检测电路由IC1、IC3、R15、R16组成。
下载后可阅读完整内容,剩余4页未读,立即下载
164 浏览量
167 浏览量
2021-07-12 上传
2022-07-15 上传
2020-10-26 上传
217 浏览量
2021-11-19 上传
2023-06-20 上传
2024-04-19 上传

weixin_38657984
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- Windows CMD命令大全:实用操作与工具
- 北京大学ACM训练:算法与数据结构实战
- 提升需求分析技巧:理解冲突与深度沟通实例
- Java聊天室源代码示例与用户登录实现
- Linux一句话技巧大全:陈绪精选问答集锦
- OA办公自动化系统流程详解
- Java编程精华500提示
- JSP数据库编程实战指南:Oracle应用详解
- PCI SPC 2.3:最新规范修订历史与技术细节
- EXT中文教程:入门到进阶指南
- Ext2核心API中文详细解析
- Linux操作系统:入门与常用命令详解
- 中移动条码凭证业务:开启移动支付新时代
- DirectX 9.0 游戏开发基础教程:3D编程入门
- 网格计算新纪元:大规模虚拟组织的基础设施
- iReport实战指南:从入门到精通
