STM32F4 CAN通讯实验:正点原子探索者开发板指南
版权申诉
158 浏览量
更新于2024-06-25
收藏 2.86MB PDF 举报
"本资源是一份关于STM32F4开发板进行CAN通讯实验的教程,主要涵盖了CAN通讯的基础知识,硬件设计,软件设计以及下载验证的步骤。内容包括CAN协议的简介,特点,以及在STM32F4开发板上的具体应用。"
STM32F4开发指南中的CAN通讯实验详细解析:
32.1 CAN简介
CAN(Controller Area Network)是一种广泛应用的串行通信协议,最初由德国博世公司为汽车行业开发,后来成为ISO国际标准。CAN协议因其高可靠性和高性能,在汽车电子、工业自动化、医疗设备等领域得到广泛应用。CAN总线采用两线制,通过电位差判断总线状态,存在显性电平和隐性电平两种状态,用于传输数据。
32.2 硬件设计
在STM32F4开发板上进行CAN通讯,需要配置CAN控制器和物理层接口。STM32F4系列MCU内置了CAN控制器,可以连接到汽车或工业环境的CAN总线。硬件设计包括正确连接CAN接口的晶体振荡器,确保通信时钟的准确性,以及连接CAN收发器以实现物理层的信号转换,确保信号的长距离传输。
32.3 软件设计
在软件层面,首先需要配置STM32的GPIO引脚,设置为CAN模式。然后初始化CAN控制器,包括设定波特率、滤波器设置等。接下来,定义CAN消息结构体,填充数据并设置消息标识符(ID)以确定优先级。最后,使用CAN发送和接收函数实现数据的传输和接收。
32.4 下载验证
实验完成后,需要通过编程工具将编译好的固件下载到STM32F4开发板上。验证过程包括检查CAN通讯是否正常,例如,可以在一个开发板上发送数据,另一个开发板接收并显示在TFTLCD模块上。通过实际数据交互确认CAN通讯的正确性。
CAN协议的特点:
1)多主竞争机制:CAN总线允许多个节点同时发送数据,通过逐位仲裁确定优先级,高优先级节点继续发送,低优先级节点停止并转为接收模式。
2)灵活性:CAN协议不依赖于特定的物理地址,增加了新设备不会影响现有网络的运行。
3)高速通信:CAN最高可达1Mbps的数据速率,且通信距离较远,可达1公里(在较低速率下)。
通过这个实验,开发者可以深入理解CAN通讯的工作原理,并掌握在STM32F4平台上实现CAN通讯的具体方法,这对于嵌入式系统开发尤其重要,尤其是在需要实时、可靠通信的场合。
STM32F4 开发指南(库函数版)
ALIENTEK 探索者 STM32F407 开发板教程
407
同步段(SS)
传播时间段(PTS)
相位缓冲段 1(PBS1)
相位缓冲段 2(PBS2)
这些段又由可称为 Time Quantum(以下称为 Tq)的最小时间单位构成。
1 位分为 4 个段,每个段又由若干个 Tq 构成,这称为位时序。
1 位由多少个 Tq 构成、每个段又由多少个 Tq 构成等,可以任意设定位时序。通过设定
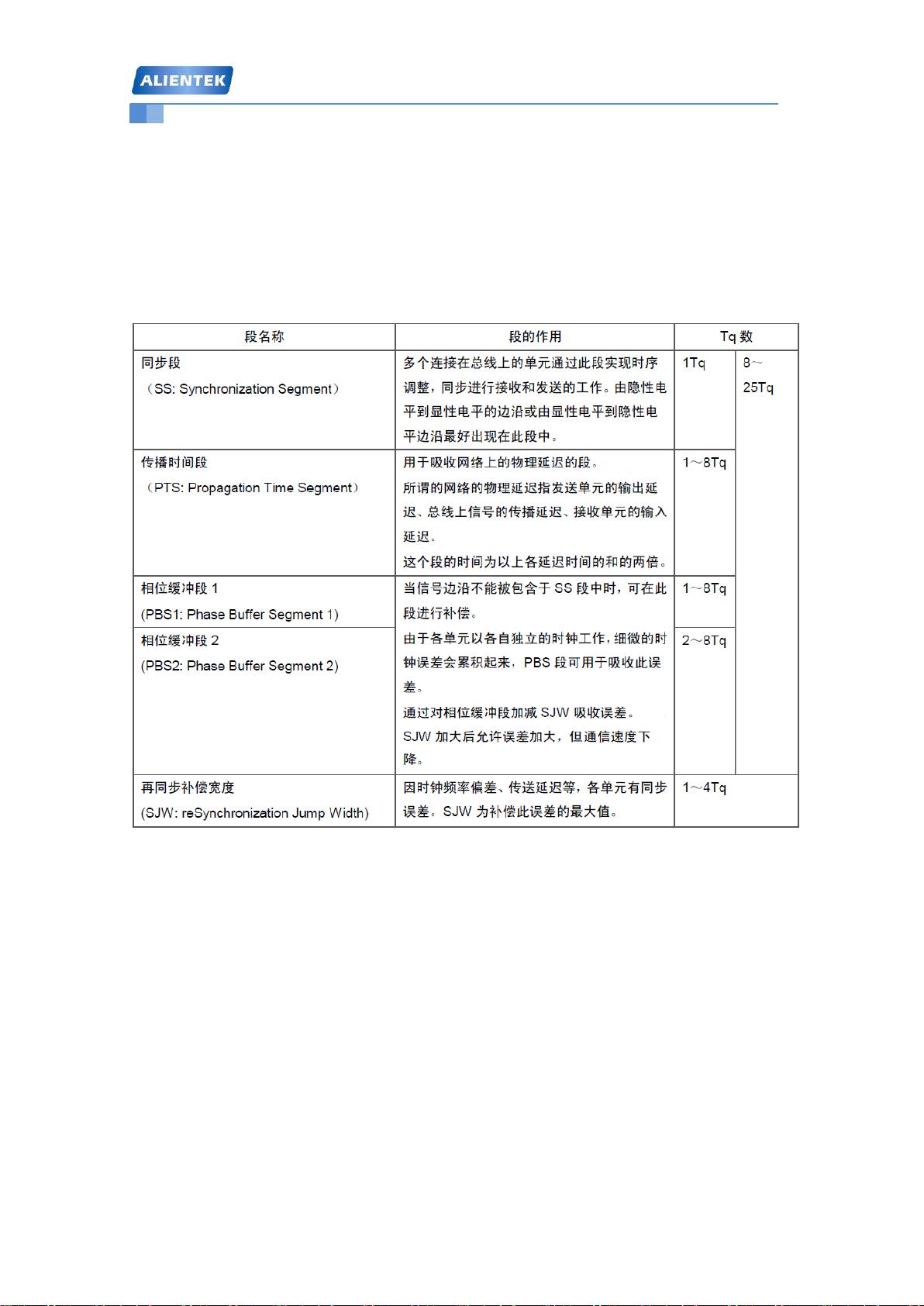
位时序,多个单元可同时采样,也可任意设定采样点。各段的作用和 Tq 数如表 32.1.2 所示:
表 32.1.2 一个位各段及其作用
1 个位的构成如图 32.1.8 所示:
剩余27页未读,继续阅读
7170 浏览量
154 浏览量
124 浏览量
176 浏览量
2023-06-06 上传
166 浏览量
243 浏览量
2023-06-06 上传
177 浏览量

omyligaga
- 粉丝: 101
 我的内容管理
展开
我的内容管理
展开







最新资源
- 虚幻引擎4经典FPS游戏开发包解析
- 掌握LaTeX中psfig.sty的使用技巧
- 探索X102 51学习板:深入嵌入式系统开发
- 深入理解STM32外部中断的实现与应用
- 大冶市数字高程模型(DEM)数据详细解读
- 俄罗斯方块游戏制作教程:Protues实现指南
- ASP.NET视频点播系统源代码及论文:多技术项目资源集锦
- Platzi JavaScript课程体系:全面覆盖初、中、高级
- cutespotify:跨平台MeeSpot音乐播放器兼容SailfishOS
- PictureEx类:在VC6下显示jpg与gif动图
- 基于stc89C51的数字时钟Proteus仿真设计
- MATLAB全面基础教程与实践技巧分享
- 实现双行文字向上滚动效果的js插件
- Labview温度报警系统:实时监控与声光警报
- Java官网ehcache-2.7.3实例教程
- A-Frame超级组件集:超帧的创新与应用
