改进的VSVCPID控制策略防止八旋翼无人机偏航制动器过载
11 浏览量
更新于2024-08-27
收藏 738KB PDF 举报
本文主要探讨了针对共轴八旋翼无人飞行器(UAV)设计一种新型的变量结构和变量系数比例积分微分(VSVCPID)控制方法,目的是解决其偏航运动时的伺服器饱和问题。相较于传统的四旋翼无人机,共轴八旋翼无人机在驱动能力、载重能力和抗扰动性能上有所提升,但其偏航运动的动态特性相对较弱,这使得传统的PID控制在应对风阻等外部干扰时可能面临饱和问题。
作者团队包括程鹏、常春昭、熊功、郭远、岳白、徐栋夫、高庆嘉和田燕涛,他们首先构建了共轴八旋翼无人机的动力学和运动学模型,明确了偏航运动在系统中的相对重要性。为了克服这个问题,提出了VSVCPID控制策略,这种控制方法的特点在于它的结构可以根据系统状态动态变化,同时系数也是可变的。这样设计旨在增强控制系统的适应性和鲁棒性,特别地,它具备条件下的抗风堵功能,能够有效地防止由于外部扰动导致的伺服器过载。
在理论分析之后,作者通过数值模拟进行了深入研究,模拟结果验证了VSVCPID控制的有效性。接着,他们在室内和室外进行了实际的原型实验,进一步证实了这种控制方法在共轴八旋翼无人机上的实用性和优越性。实验结果显示,VSVCPID控制能够在确保系统稳定性和响应速度的同时,避免了偏航运动中常见的伺服器饱和现象,从而提高了无人飞行器的整体性能和安全性。
这项研究为共轴八旋翼无人飞行器的控制设计提供了一种创新且实用的解决方案,对于提高这类复杂多旋翼无人机的控制性能具有重要意义,对于实际工程应用具有很高的价值。
dynamic equations of the eight-rotor can be
obtained by
dH
dt
¼
H
t
þ x H ¼ M ð1Þ
where
dH
dt
represents the absolute derivative of H with
respect to the frame E, and
H
t
denotes the relative
derivative to the frame B, with the angular momen-
tum H represented as
H ¼ J x ð2Þ
and J ¼ diag I
x
, I
y
, I
z
as the moment of inertia along
x, y, and z directions. x ¼ p, q, r½
T
denotes the angu-
lar velocity with respect to the frame B. The torque
provided by the rotors thrust is expressed as
M ¼
M
x
M
y
M
z
2
6
4
3
7
5
¼
AC
T
R
2
l
2
3
þ
2
4
2
7
2
8
AC
T
R
2
l
2
1
þ
2
2
2
5
2
6
AC
D
R
3
2
1
þ
2
4
þ
2
5
þ
2
8
2
2
2
3
2
6
2
7
2
6
4
3
7
5
ð3Þ
where is air density, R denotes rotor radius,
A ¼ R
2
is rotor disk area, and C
T
, C
D
express
thrust coefficient and torque coefficient, respectively.
14
l represents the distance between the rotor and the
center of the eight-rotor.
As the eight-rotor is subjected to the external dis-
turbance that is assumed to the horizontal wind dis-
turbance, the reactive torque provided in the ith rotor
can be described as
M
i
¼ AC
D
Rð
i
R þ cosð
i
tÞÞ
2
, i ¼ 1, 2, ...,8
ð4Þ
where t is the time, denotes the inflow velocity, and
its direction is opposite to the direction of initial rotor
speed.
J
_
x ¼skðxÞJ x þ M ð5Þ
where skðxÞ called as skew-symmetric matrix is
defined by
skðxÞ¼
0 rq
r 0 p
qp 0
2
4
3
5
ð6Þ
Accordingly, substituting equation (3) into equa-
tion (5) gives
_
p
_
q
_
r
2
4
3
5
¼
½M
x
qrðI
z
I
y
Þ=I
x
½M
y
prðI
z
I
x
Þ=I
y
M
z
=I
z
2
4
3
5
ð7Þ
where I
x
¼ I
y
due to the symmetry of x and y direc-
tion in body-fixed frame B.
There is the relationship between the body angular
velocity x and the Euler rates
_
g by the fact that they
are from different coordinate systems, which can be
depicted by
_
g ¼ T x ð8Þ
where
T ¼
1 sin tan cos tan
0 cos sin
0 sin sec cos sec
2
6
4
3
7
5
ð9Þ
T is invertible when the pitch angle satisfies
6¼ð2k 1Þ=2, ðk 2 ZÞ. In the general case of
small attitude, it is reasonable to assume that T is a
unit matrix for simplicity.
The translational model calculated by the Newton-
Euler equation is derived as
m
dV
dt
¼ m
V
t
þ x V
¼ F þ DF þ W
1
ðmg E
3
Þ
ð10Þ
where V ¼½u, v, w
T
denotes the velocity with respect
to the frame B, E
3
¼½0, 0, 1
T
, m is mass of the eight-
rotor, g is acceleration due to gravity, and the thrust is
expressed by
F ¼
0
0
AC
T
R
2
ð
2
1
þ
2
2
þ
2
3
þ
2
4
þ
2
5
þ
2
6
þ
2
7
þ
2
8
Þ
2
4
3
5
ð11Þ
DF is treated as the negligible aerodynamic force.
The matrix W called the rotation matrix maps vectors
b
o
g
o
b
x
g
x
b
z
g
z
b
y
p
q
r
φ
θ
ψ
g
y
5
Ω
3
Ω
1
Ω
7
Ω
8
Ω
6
Ω
4
Ω
2
Ω
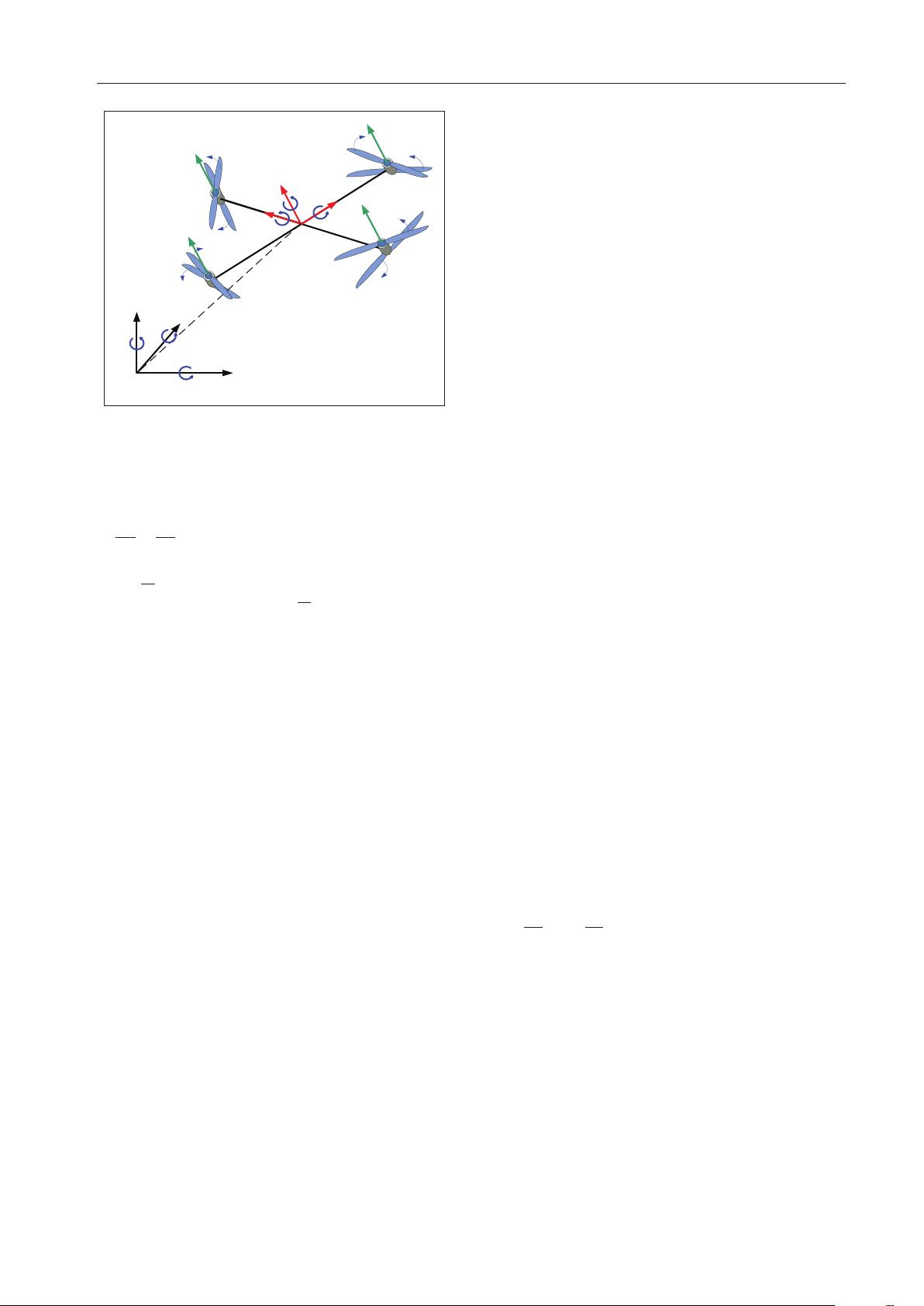
Figure 1. The scheme of the coaxial eight-rotor UAV.
Peng et al. 1663
剩余13页未读,继续阅读
2020-03-04 上传
2020-03-12 上传
2019-12-30 上传
2020-02-18 上传
2020-03-03 上传
152 浏览量
106 浏览量
106 浏览量
2020-03-03 上传
2020-03-10 上传

weixin_38634065
- 粉丝: 7
- 资源: 970
 我的内容管理
展开
我的内容管理
展开







