T-S模糊系统辨识理论与应用
需积分: 10 171 浏览量
更新于2024-07-31
收藏 531KB PPT 举报
"华北电力大学自动化系的课程资料,主题为模糊控制理论研究,特别是T-S模糊系统的辨识问题。内容涵盖了模糊控制的基础概念、静态和动态系统的辨识分类,以及T-S模糊规则的结构和辨识方法。"
在T-S模糊系统的研究中,模糊控制是一种处理非线性系统的控制策略,由Takagi和Sugeno提出的模糊逻辑系统模型为理解和设计这类控制系统提供了理论基础。T-S模糊系统辨识主要是确定模糊系统的结构和参数,以便该系统能准确地模拟或近似实际复杂系统的动态行为。
模糊系统辨识问题可以分为两大类:参数辨识和结构辨识。参数辨识关注的是确定模糊规则中的隶属函数和非线性函数的具体形式和参数,而结构辨识则涉及到识别模糊规则的数量、输入输出变量的模糊集及其相互关系。对于静态系统的辨识,目标是找到一组模糊规则,使得系统在给定输入时能预测出正确的输出。而在动态系统中,需要考虑时间变量,辨识过程更为复杂。
在描述T-S模糊规则时,通常使用“如果...那么...”的形式,其中前件变量(x1~xk)对应输入,结论变量(y)对应输出。每个模糊规则都与一个非线性函数g相关联,该函数将前件变量映射到输出变量。例如,规则“如果x1大,x2小,那么y大”可以用数学形式表示,即通过一系列模糊集合和非线性函数来精确化。
在实际的辨识过程中,通常会利用输入数据和期望输出数据来优化规则的参数,以最小化预测输出与期望输出之间的误差。在T-S模糊系统的特殊情况下,规则可以简化为线性形式,这使得辨识问题变得更为简洁,便于求解。
T-S模糊模型的优势在于其灵活性和对非线性系统的适应性。通过辨识得到的模糊规则,可以清晰地表达系统行为,并且可以进行控制器设计和系统性能优化。在工程应用中,T-S模糊系统被广泛用于电力系统、自动控制、机器人控制等多个领域。
T-S模糊系统辨识是模糊控制理论的关键组成部分,涉及了从数据中学习模糊规则的过程,目的是构建一个能够准确反映实际系统行为的模糊模型。这个过程不仅包括确定模糊规则的数量和结构,还包括找出最佳的非线性函数参数,以实现对复杂系统行为的有效建模和控制。
21/8/6
7
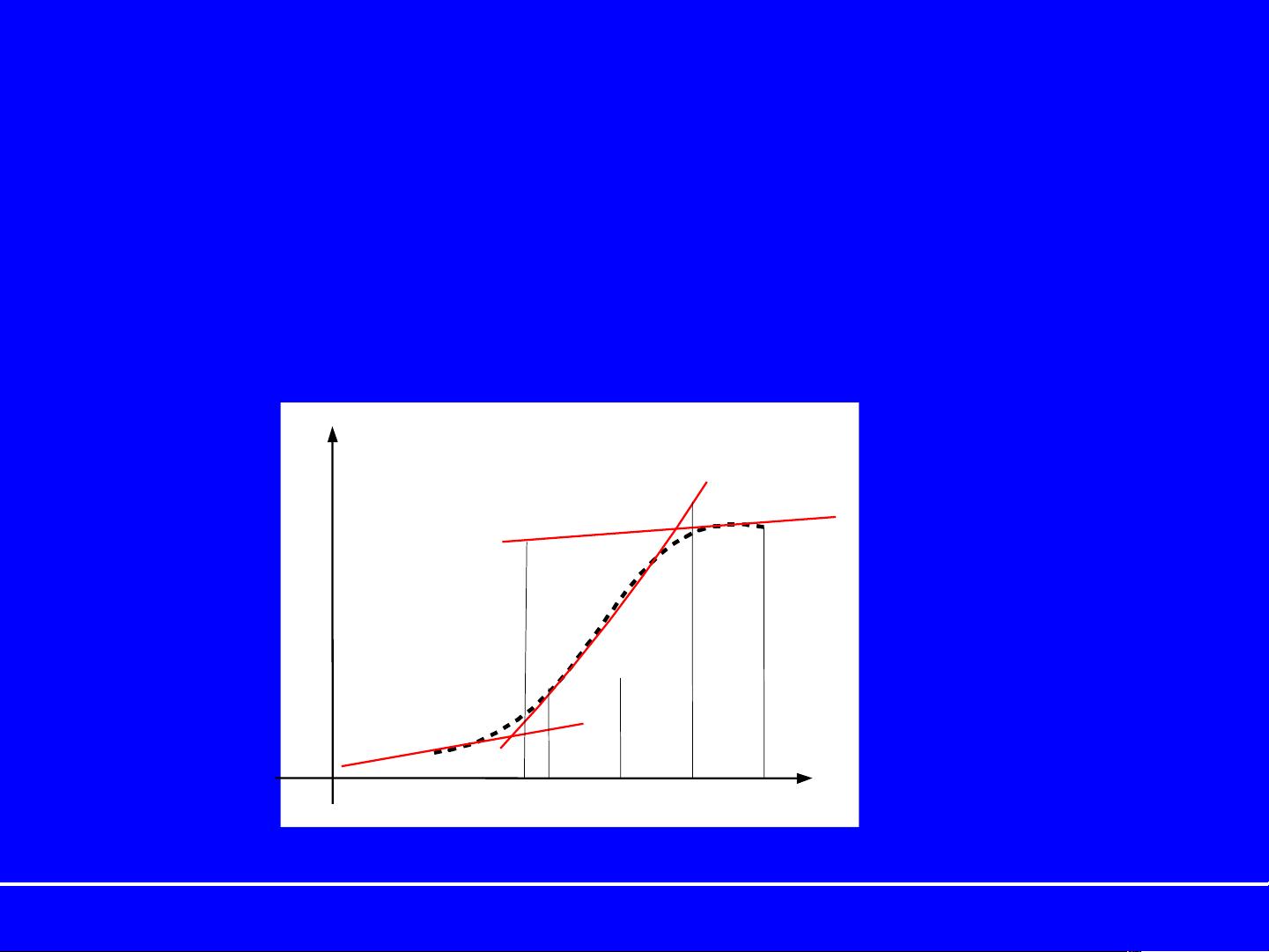
在输入空间已划分的情况下,模糊辨识的实质就是在所定义
的空间下,给出规则的集合。
举例 :
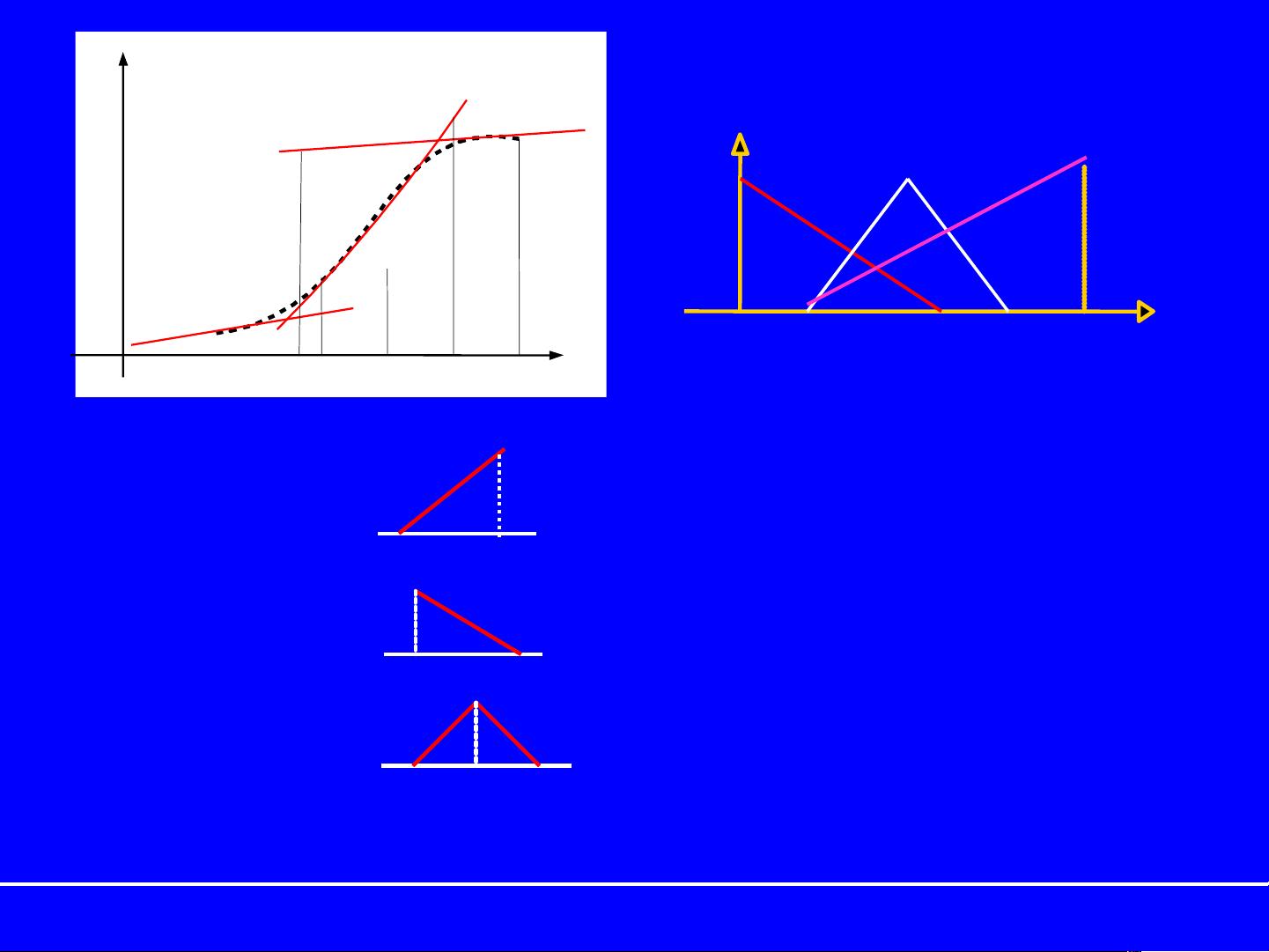
用 3 条规则逼近原函数(如右图 ) 。输入 - 输出对
的数据已知,这里假定只有 1 个输入变量 , 它被划分为 3 个
模糊集合 , 即大、中、小。可描述的规则如下:
44.5
7.0
8.5 10
R
2
R
3
R
1
X
Y
剩余38页未读,继续阅读
2021-05-06 上传
2020-03-01 上传
2020-05-28 上传

field1019
- 粉丝: 2
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
