MATLAB实现数字PID控制器的仿真分析
版权申诉
113 浏览量
更新于2024-06-29
收藏 1.51MB DOCX 举报
"该文档是关于数字PID控制器的计算机仿真的学习资料,主要涉及计算机控制技术课程中的PID控制器设计和参数整定。通过MATLAB软件进行仿真,针对三种不同的被控对象(二阶振荡环节、非最小相位特性的过程、具有低通特性和纯滞后的过程)进行控制,目标是确定最佳PID参数,使得系统性能满足特定要求。"
本文档详细阐述了数字PID控制器的计算机仿真过程,旨在帮助学习者深入理解PID控制器的工作原理和参数设定。PID控制器由比例(P)、积分(I)和微分(D)三个部分组成,其基本算法如下:
△u(k) = q0 * e(k) + q1 * e(k-1) + q2 * e(k-2)
u(k) = u(k-1) + △u(k)
这里的e(k)是误差信号,q0、q1、q2分别是比例、积分和微分增益,而u(k)是控制输出。初始条件设定为:u(k-1)=u(k-2)=0,e(k-1)=e(k-2)=0,y(k-1)=y(k-2)=0。
在仿真中,选择了三种典型的被控对象:
1. 二阶振荡环节:G(z) = (1 / (bz1 + bz2)) / (1 + az1 + az2),参数分别为a、b和T。
2. 具有非最小相位特性的过程:G(z) = (1 / (bz1 + bz2)) / (1 + az1 + az2^2),具有负实部的极点。
3. 具有低通特性和纯滞后的过程:G(z) = (bz1 + bz2 + bz3) / (z^d * (1 + az1 + az2 + az3)),包含了延迟项d。
仿真要求包括:
1. 使用MATLAB计算超过40个时间步长的y(k)和u(k),并绘制相关曲线。
2. 对这三种对象,当采样时间T为1或2秒时,通过整定找到最佳的PID参数。
3. 整定方法采用凑试法,需要计算上升时间(tr)、超调量(poss)和收敛时间(ts),并确保poss<5%,tr<25,ts<40。
整定过程举例:
对于二阶振荡环节,首先设置不确定的Kp、Ti和Td值,然后根据PID公式计算q0、q1和q2。接着,通过MATLAB编写程序,初始化误差e、控制输入u和系统输出y的矩阵,以及计算增量du。在仿真过程中,不断调整PID参数,直至系统性能指标满足要求。
通过对这三种被控对象的仿真,学习者可以深入掌握PID控制器的参数整定方法,理解不同系统特性的控制策略,并熟悉MATLAB在控制系统仿真的应用。这个过程有助于培养实际工程中的问题解决能力。
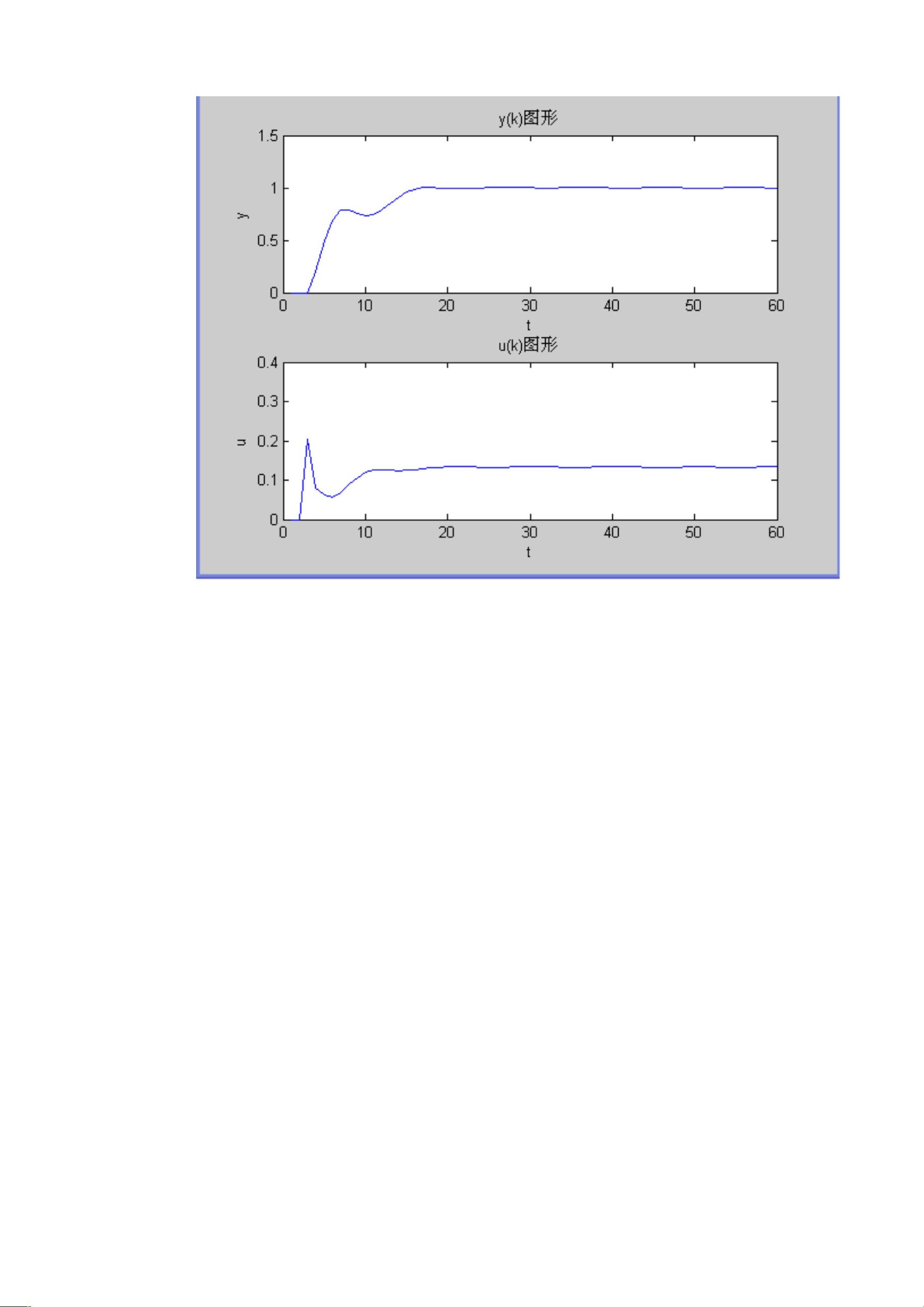
d)、40 步仿真数据
u(k)
0
0
0.1900
0.0800
0.0689
0.0635
0.0743
0.0898
0.1049
0.1163
0.1230
0.1334
0.1334
0.1333
Y(k)
0.1259
0.1336
0.1334
0.1333
0.1266
0.1264
0.1265
0.1273
0.1287
0.1303
0.1317
0.1328
0.1333
0.1333
0.1333
0.1335
0.1334
0.1333
0.1333
0.1334
0.1333
0.1332
0.1333
0.1333
0.1331
0.1333
0.1333
0.1331
0.1333
0.1333
0.1332
0.1333
0.1333
0.1333
0.1333
0.1333
0
0
0
0.1900
0.4600
0.9008 0.9474
0.9946 0.9978
0.9995 0.9998
0.9999 1.0000
0.6659
0.9803
1.0003
1.0000
1.0000
0.7748
0.9978
1.0016
1.0002
1.0000
0.8021
1.0028
1.0019
1.0002
1.0000
0.7878
0.7700
0.7723
0.9915
0.9999
1.0000
0.8006
0.9903
0.9995
1.0000
0.8478
1.0003
1.0014
1.0002
1.0000
0.9954
1.0006
1.0001
1.0000
0.9917
0.9994
0.9999
Poss=0.2801
ts=15
tr=10
wucha =-1.3850e-006
(2) :二阶振荡环节
a)、实验程序
Kp=?;Ti=?;Td=?;T=1;
q0=Kp*[1+T/Ti+Td/T];
q1=-Kp*[1+2*Td/T];
q2=Td*Kp/T;

剩余25页未读,继续阅读
2022-11-29 上传
279 浏览量
154 浏览量
2023-02-20 上传
125 浏览量









