绿色蜂窝网络能效优化:基于博弈论的基站休眠策略
下载需积分: 5 | PDF格式 | 2.4MB |
更新于2024-07-13
| 126 浏览量 | 举报
“绿色蜂窝网络中的最佳基站Hibernate:基于博弈论的分布式合作框架”
这篇研究论文探讨了在绿色蜂窝网络中如何通过一种基于博弈论的分布式合作框架优化基站(Base Station, BS)的休眠策略,从而提高网络的能源效率。在绿色蜂窝网络中,基站的能源消耗是主要的能耗来源,因此有效地管理基站的工作状态对于实现网络的绿色化至关重要。
文章首先介绍了问题背景,指出随着移动通信技术的发展,基站数量不断增长,能源消耗成为运营商面临的一大挑战。为了降低能源成本并减少对环境的影响,研究者提出了基站休眠(Sleeping)策略,即在低负载时段让部分基站进入休眠模式,以减少不必要的能源消耗。
接着,论文提出了一种新的分布式合作框架。该框架考虑了相邻基站之间的相互影响,相邻BS根据各自的流量负载情况协同决定休眠策略。这种合作是基于生态自组织原理,即每个基站作为一个个体,根据环境变化调整自己的行为以优化整体网络性能。
为了解决这一问题,论文构建了一个交互图(Interaction Graph),用于表示基站休眠操作对网络的影响。然后,他们将节能问题建模为一个约束图形游戏(Constrained Graphical Game)。在这个游戏中,每个基站都是一个玩家,其目标是在满足用户最低服务需求的前提下,最大化能源节省。玩家的行为受到自身流量负载的约束。
关键的是,论文证明了这个约束图形游戏是一个精确的约束势游戏(Constrained Potential Game)。这意味着尽管每个基站都有自己的利益目标,但在全局最优解中,所有基站的利益是一致的,即整个网络的能源效率可以得到最大化。这样的特性使得基站可以通过简单的局部策略更新达到全局最优状态,而无需复杂的中心协调。
此外,论文可能还讨论了如何设计有效的算法来解决这个博弈问题,包括基站如何根据邻居的状态和自身的负载信息进行决策,以及如何确保在动态的网络环境中保持系统的稳定性和鲁棒性。最后,可能还会有模拟实验和性能评估,以验证所提出的框架在实际网络环境中的有效性,并与其他已知方法进行比较。
这篇研究论文为绿色蜂窝网络的能源管理提供了一个创新的解决方案,利用博弈论构建了一个分布式合作框架,旨在实现基站的智能休眠,以提高能源效率,同时保证服务质量。这一工作对移动通信网络的可持续发展具有重要意义,对未来的基站能源管理和网络优化设计提供了理论指导和技术支持。
4394 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 14, NO. 8, AUGUST 2015
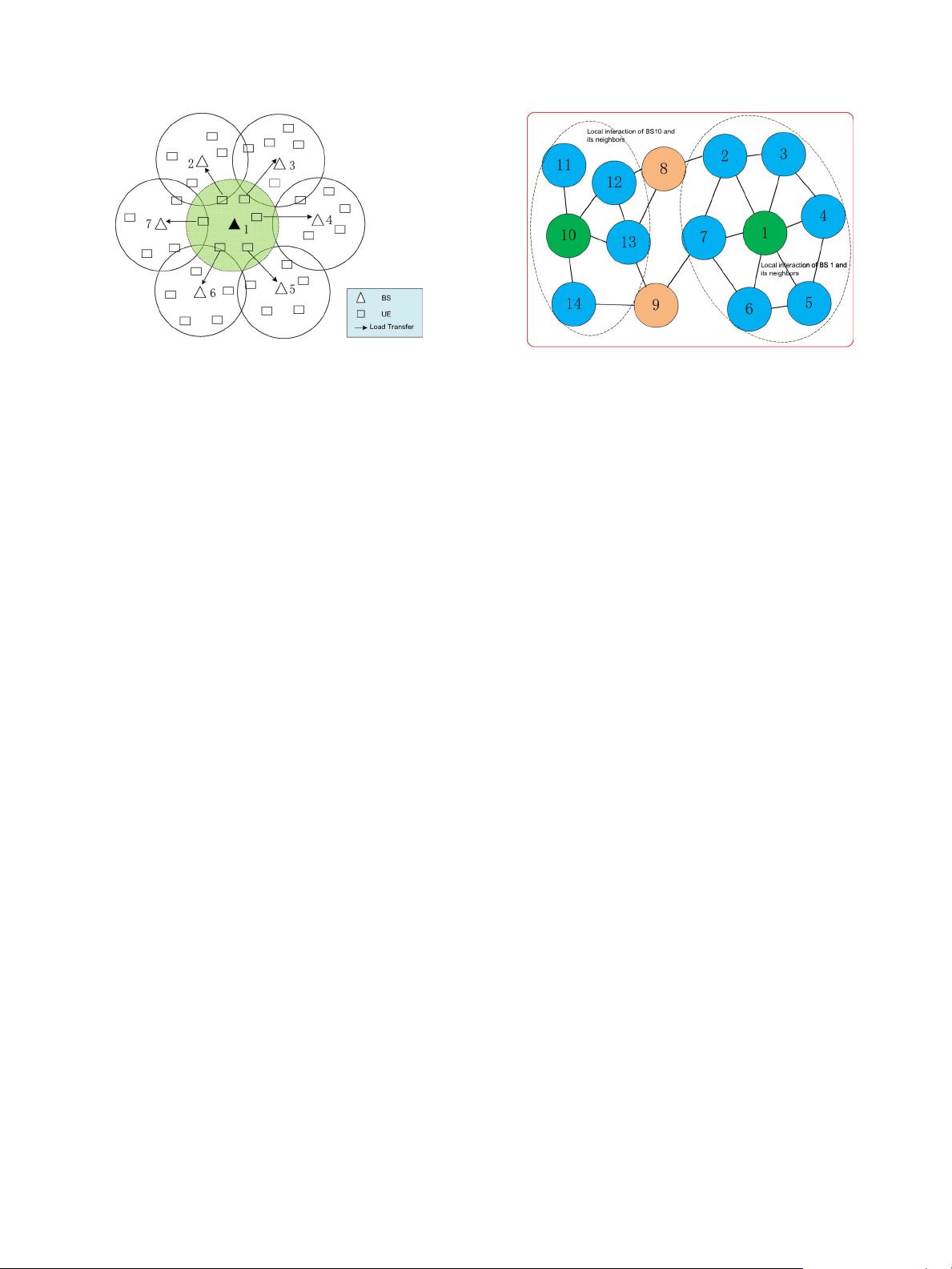
Fig. 1. BS cooperation for energy saving.
especially when the number of BSs is large; Second, it needs a
centralized controller which collects the channel state informa-
tion and traffic load information from all BSs in practice.
It is worth noting that the existing works [4], [16] only pro-
pose some greedy heuristic algorithms to find a feasible solu-
tion to the problem (6), and there is no theoretic analysis on the
optimality property. Moreover, the proposed algorithms require
the information from all involved BSs. Then, Oh et al. [18] aims
to reduce the information exchange by designing distributed
algorithms. However, no optimality of the algorithm can be
guaranteed.
III. L
OCAL COOPERATION GAME FOR
ENERGY-SAV I N G BS SWITCHING
In this section, we discuss on the distributed optimization of
the above problem (6) by using game theory [35]–[43], which is
a powerful tool to analyze the interactions between distributed
decision makers and thereby improve the performance of de-
centralized networking/framework.
A. Local Interaction and Cooperative BS Sleeping Mechanism
When one BS is turned off, apparently, this would result
in an increase in the system load of neighboring BSs. This is
because those UEs originally associated with the switched-off
BS need to be transferred to its neighbors (as shown in Fig. 1),
even they may experience lower service rates R
k
(x, B
on
) due
to farther distances between the UEs and their new serving
BSs. The neighboring BSs (BSs 2-7) are serving as acceptors
for BS 1 by cooperatively sharing its traffic (as shown by the
arrows) and allowing BS 1 to turn into sleeping mode for saving
energy. At the same time, for supporting the extended coverage
zones, transmission power of these acceptors (BSs 2-7) should
be adjusted.
The network model is presented in Fig. 2 to capture the local
interaction among the neighboring BSs. The solid lines between
any two BSs denote the interaction between them. When BS 1
and BS 10 are switched off, the local interaction domain of BS 1
and BS 10 are illustrated by the dashed lines. For instance, as
described in the figure, BS 10 and its neighboring BSs 11-14
are interacting via their own local processes. Here, BS 10 may
have no knowledge on the behavior of other BSs beyond its own
Fig. 2. Distributed network model.
domain (i.e., BSs 1-9). However, the neighboring BSs of BS 10
are also interacting with their respective neighboring BSs, and
thus, BS 10 is directly and indirectly influencing the behavior
of all the other BSs in the system. In turn, local behaviors of
the BSs would generate the global behavioral pattern of the
whole system. This type of interaction f ollows the principle of
ecological self-organization [27]–[29].
Definition 1: An Interaction Graph is defined by G
r
=
(K,ε), where K is the set of vertices (BSs as players), ε is the
set of edges. We say BSs j and k are direct neighbors if they are
connected by an edge, i.e., (j, k) ∈ ε. Moreover, we define C
k
as the set of BS k’s neighbors, C
k
= {j :(j, k) ∈ ε}. Notably,
j ∈C
k
⇔ k ∈C
j
.
B. Graphical Game Model
Then, the graphical game model is formally denoted by G =
[G
r
, {S
k
}
k∈K
, {U
k
}
k∈K
, {f
k
}
k∈K
], where S
k
= {0, 1} (0 de-
notes “off”, 1 denotes “on”) is the set of available switching
strategy for player (BS) k, U
k
is the utility function of player
k to evaluate the energy consumption, and f
k
represents a
correspondence function for satisfaction of the constraint [32].
An strategy profile of all the players is a vector, denoted by s =
(s
1
,s
2
,...,s
K
) ∈S, where S = S
1
⊗S
2
⊗···⊗S
K
repre-
sents the joint strategy space for all the players. Besides, the
strategy profile of all the players excluding k is denoted by
s
−k
=(s
1
,...,s
k−1
,s
k+1
...,s
K
) ∈S
−k
, where S
−k
= S
1
⊗
···⊗S
k−1
⊗S
k+1
⊗···⊗S
K
. Additionally, the strategy pro-
file of player k’s neighbors is denoted by s
C
k
∈S
C
k
, where
S
C
k
= ⊗
j∈C
k
S
j
represents the joint strategy space for player
k’s direct neighbors.
Based on the interaction graph, the energy consumption of
each player (say player k) only depends on the strategies of
itself and its neighbors, and thus can be denoted by φ
k
(s
k
, s
C
k
).
Moreover, because 1) the neighboring BSs connected though
high-speed wireline can easily communicate with each other
(e.g., over X2 interface in LTE), 2) efficiency of the game can
be greatly improved by local cooperation, we design the utility
function as
U
k
(s
k
, s
D
k
)=−
φ
k
(s
k
, s
C
k
)+
i∈C
k
φ
i
(s
i
, s
C
i
)
, (7)
下载后可阅读完整内容,剩余15页未读,立即下载
相关推荐



weixin_38715094
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开








最新资源
- Windows编程中毫秒级等待进程的实现方法
- 构建温度转换器提升JavaScript技能
- 广州城中村改造进展与未来发展分析
- Java JDBC教程: 初学者如何使用MySQL进行数据库操作
- imageGrab Chrome扩展:一键下载网页图像
- Perl实现的freedb cddb数据库接口工具
- Lua国际化工具:say字符串哈希库的使用示例
- draftjs_exporter:实现Draft.js富文本到HTML转换的Python库
- 无线尿湿报警器技术创新与纸尿产品市场应用
- 掌握js-reverse:在浏览器与Node.js中实现反向功能
- 易语言libmySQL6.1模块的源码解析
- 利用Java Bulk API实现CSV到Elasticsearch的导入
- Egg.js框架的LiquidJs视图插件使用指南
- PyIP:Python包实现IP数据包处理与网络工具
- KOOMPI全栈开发者的学习路线图指南
- 利用OpenCV与SVM+HOG实现视频行人识别
