PID控制器原理详解:从入门到精通
需积分: 10 143 浏览量
更新于2024-09-08
收藏 608KB DOC 举报
"这篇资料主要介绍了PID控制算法的基础知识,适合初学者理解PID控制器的工作原理。PID控制器在自动化领域广泛应用,其通过比例、积分和微分三个环节来调整控制输出,以减小系统误差并提高稳定性。"
PID控制器是工业自动化中最常用的控制算法之一,它的全称是比例-积分-微分控制器。PID控制器通过结合这三个控制环节来实时调整系统的输出,以期使系统响应尽可能接近预设的目标值。
1. 比例环节(P):比例环节是PID控制器中最基本的部分,它直接反映了偏差e(t)(即期望值r(t)与实际值y(t)之间的差值)对控制输出u(t)的影响。比例系数KP决定了控制响应的速度和强度。增大KP可以使系统响应更快,但可能导致系统振荡,影响稳定性。
2. 积分环节(I):积分环节关注的是偏差的累积,用于消除静态误差。只要偏差存在,积分输出就会持续增加,直至偏差归零,从而使系统趋于稳态。积分时间常数TI决定了积分速度,较大的TI意味着更慢的积分积累,有助于减少超调和提高稳定性,但可能会延长系统达到稳态的时间。
3. 微分环节(D):微分环节关注偏差的变化率,它预测未来偏差的趋势,提前做出调整,以减少超调和加速系统收敛。微分时间常数TD决定了这种预测能力。适当的TD设置能优化系统的动态性能,但微分作用对输入噪声敏感,噪声大的系统可能需要避免使用微分或在应用微分前对输入信号进行滤波。
通过调整PID参数(KP、TI、TD),可以优化控制器性能,使其适应不同的控制任务。例如,在液位控制的例子中,通过比例和积分作用,液位会逐渐接近目标值,但始终存在一个无法消除的稳态误差。而加入微分作用,可以在偏差发生变化时提前做出反应,有助于减小这个稳态误差。
总结来说,PID控制器通过比例、积分和微分三者的协同工作,实现对系统输出的精确控制,以达到期望的性能指标。对于初学者而言,理解这三个环节的作用以及如何调整参数是掌握PID控制技术的关键。
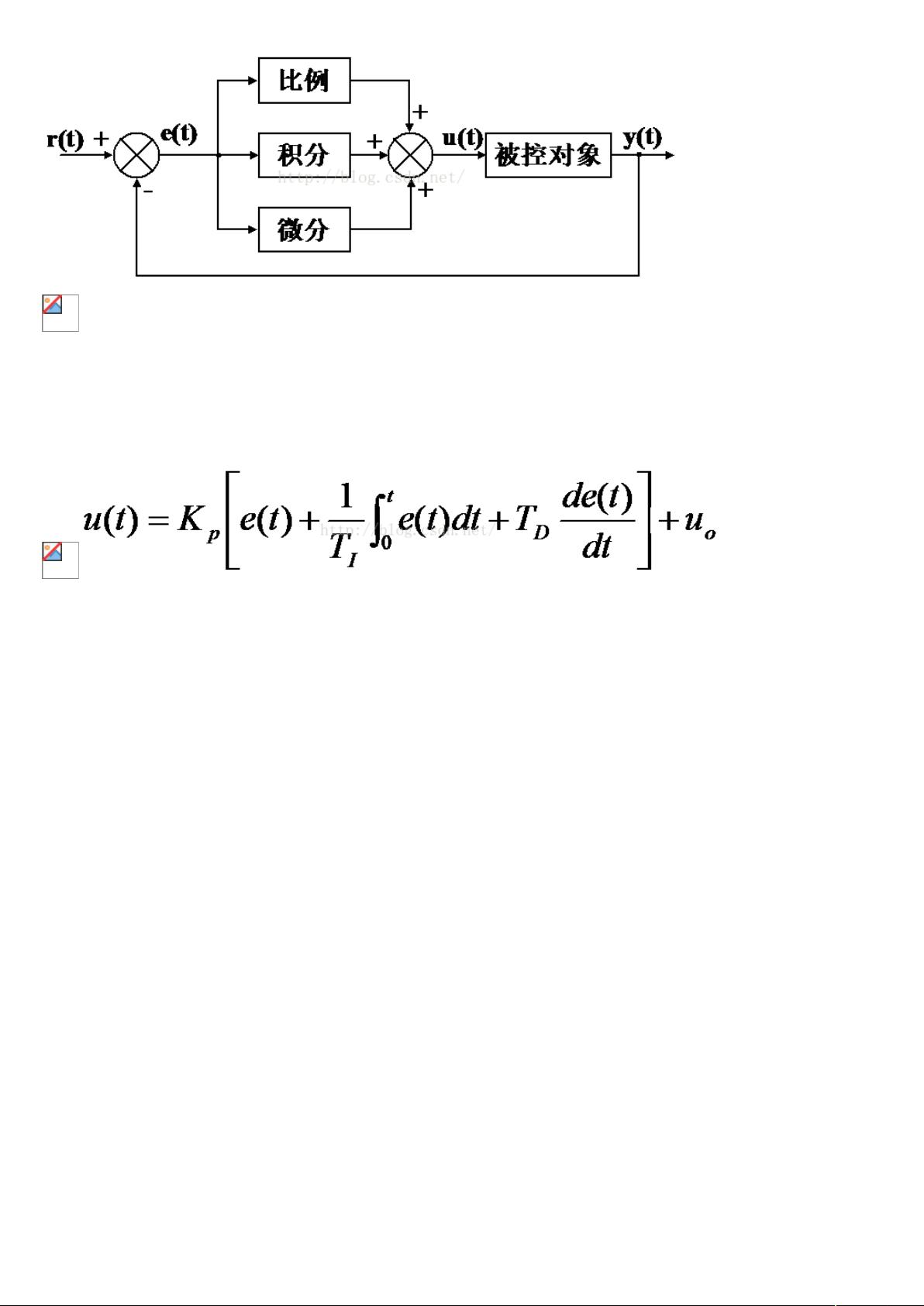
PID 是自动控制领域使用比较多的控制器,下图为 PID 控制系统的原理图:
该系统由模拟 PID 控制器和被控对象组成。图中,r(t)是给定值,y(t)是系统的实际输出值,给定
值与实际输出值构成控制偏差 e(t),有 e(t) = r(t)- y(t) e(t)作为 PID 控制器的输入,
u(t)作为 PID 控制器的输出和被控对象的输入。
所以 PID 控制器的的公式为如下:
其中: u(t)——调节器的输出信号;
e(t)——调节器的偏差信号,它等于给定值与测量值之差
KP——比例系数
T I ——积分时间
T D ——微分时间
u 0 ——控制常量
KP /T I ——积分系数
KP / T D ——微分系数
从整个公式中可以看出存在三个环节:
比例环节:作用是对偏差瞬间做出快速反应。偏差一旦产生,控制器立即产生控制作用,使控制量向减少偏差的方向
变化。控制作用的强弱取决于比例系数 KP, KP 越大,控制越强,但过大的 KP 会导致系统震荡,破坏系统的稳定性。
积分环节:作用是把偏差的积累作为输出。在控制过程中,只要有偏差存在,积分环节的输出就会不断增大。直到偏
差 e(t)=0,输出的 u(t)才可能维持在某一常量,使系统在给定值 r(t)不变的条件下趋于稳态。积分环节的调
节作用虽然会消除静态误差,但也会降低系统的响应速度,增加系统的超调量。积分常数 T I 越大,积分的积累作用
越弱。增大积分常数 T I 会减慢静态误差的消除过程,但可以减少超调量,提高系统的稳定性。所以,必须根据实际
控制的具体要求来确定 TI 。 (消除比例环节的稳态误差)
微分环节:作用是阻止偏差的变化。它是根据偏差的变化趋势(变化速度)进行控制。偏差变化得越
快,微分控制器的输出越大,并能在偏差值变大之前进行修正。微分作用的引入,将有助于减小超调
量,克服震荡,使系统趋于稳定。但微分的作用对输入信号的噪声很敏感,对那些噪声大的系统一般
不用微分,或在微分起作用之前先对输入信号进行滤波。适当地选择微分常数 TD ,可以使微分的作用
达到最优。
下载后可阅读完整内容,剩余3页未读,立即下载
2009-03-11 上传
2021-11-30 上传
2024-04-05 上传
2010-11-01 上传
155 浏览量
2009-07-18 上传
2023-07-16 上传

zyk520
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- BottleJS快速入门:演示JavaScript依赖注入优势
- vConsole插件使用教程:输出与复制日志文件
- Node.js v12.7.0版本发布 - 适合高性能Web服务器与网络应用
- Android中实现图片的双指和双击缩放功能
- Anum Pinki英语至乌尔都语开源词典:23000词汇会话
- 三菱电机SLIMDIP智能功率模块在变频洗衣机的应用分析
- 用JavaScript实现的剪刀石头布游戏指南
- Node.js v12.22.1版发布 - 跨平台JavaScript环境新选择
- Infix修复发布:探索新的中缀处理方式
- 罕见疾病酶替代疗法药物非临床研究指导原则报告
- Node.js v10.20.0 版本发布,性能卓越的服务器端JavaScript
- hap-java-client:Java实现的HAP客户端库解析
- Shreyas Satish的GitHub博客自动化静态站点技术解析
- vtomole个人博客网站建设与维护经验分享
- MEAN.JS全栈解决方案:打造MongoDB、Express、AngularJS和Node.js应用
- 东南大学网络空间安全学院复试代码解析
