自动3D人脸建模系统
需积分: 10 39 浏览量
更新于2024-07-29
收藏 4.82MB PDF 举报
"Image-Based 3D Face Modeling System" 是一篇关于使用图像进行三维人脸建模的学术论文,发表在EURASIP Journal on Applied Signal Processing 2005卷的第13期,由In Kyu Park、Hui Zhang和Vladimir Vezhnevets等人共同撰写。
该系统是一种自动化的3D人脸建模方法,它利用普通数码相机拍摄的正面和侧面图像来生成逼真的三维人脸模型。系统主要由四个子系统组成:
1. **正面特征检测**:这一模块用于自动识别并提取人脸的正面特征,如眼睛、鼻子、嘴巴和耳朵等。这些特征对于构建准确的人脸几何结构至关重要,因为它们定义了人脸的基本结构和比例。
2. **侧面特征检测**:与正面特征检测类似,但专注于从侧面图像中提取特征。侧面图像提供了关于鼻子、下巴和耳朵等部位的侧视信息,这对于形成完整的3D模型是必不可少的。
3. **形状变形**:这个模块负责根据正面和侧面图像中的特征信息,对基础3D人脸模型进行变形和调整。通过匹配二维图像中的特征点与三维模型上的对应点,实现模型的精确形变,确保模型的立体感和真实感。
4. **纹理生成**:在三维模型的几何结构确定后,此模块将从输入的图像中提取肤色和其他面部细节,如皮肤纹理、皱纹、斑点等,为模型赋予逼真的外观。这一过程通常涉及到图像映射和纹理合成技术。
论文详细阐述了每个子系统的具体算法和技术,包括特征点检测的算法(可能涉及边缘检测、模板匹配等)、形状变形的优化方法(如基于能量最小化的迭代过程)以及纹理贴图的技术。此外,作者还可能讨论了系统的性能评估、局限性和潜在应用,比如在人脸识别、虚拟现实、动画制作等领域。
"Image-Based 3D Face Modeling System" 是一项关于如何通过图像数据自动化创建3D人脸模型的研究,其技术具有广泛的应用前景,特别是在计算机视觉、人机交互和娱乐行业中。
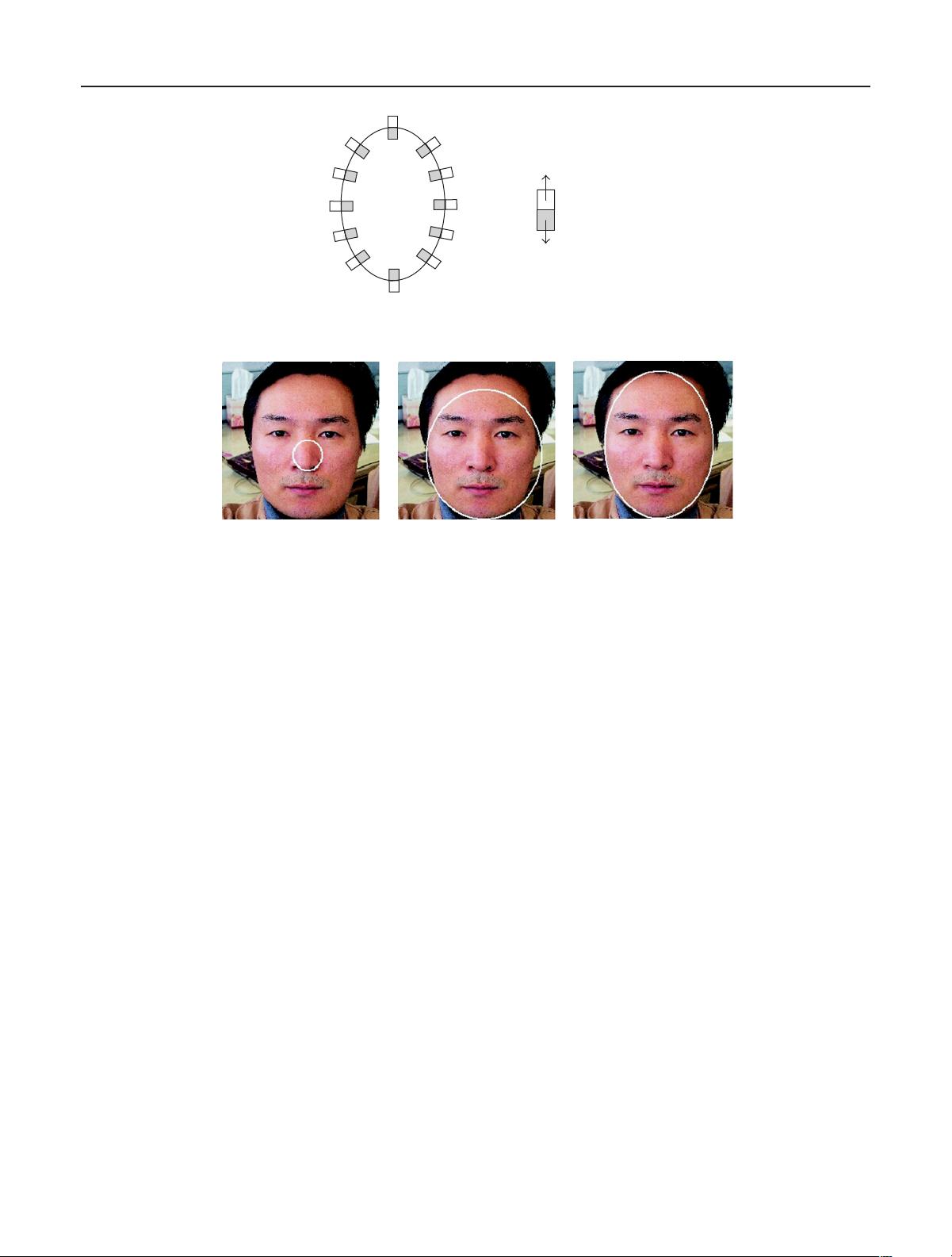
Image-Based 3D Face Modeling System 2075
Ellipse
Probe
Exterior probe neighborhood
Interior probe neighborhood
(a)
(b) (c) (d)
Figure 3: Face region detection with deformable model. (a) Deformable model. (b), (c), and (d) Convergence of the deformable model.
Here, R
n,x,y
denotes an (n × 7)-sized rectangle centered at
(x, y), while P
n,r
is an (n × n/3)-sized e llipse centered at r.
The control parameters are the scaling coefficient, α, and the
expected size of the e ye features, n.
The meaning of the variation image V
n,α
(x, y)canbede-
scribed as a dilatation of the high-frequency patterns in the
red channel facial image. The variation image is calculated
for several (n, α) pairs in order to cope with the high vari-
ance of the eye appearance, as shown in Figure 4. This results
in a stable and correct behavior for the images with differ-
ent lighting and quality. The connected components of the
pixels with high variation values are then tested to satisfy the
shape, size, and symmetry restriction in order to obtain the
best-matching eye position for each variation image inde-
pendently. Finally, different (n, α) configurations are sorted
so that the later ones generate a stronger response. Their re-
sults are combined in this order so that later results can either
provide an output if no response is generated previously, or
refine the previous results otherwise.
2.3. Eye contours detection
The eye contour model consists of an upper lid curve in a cu-
bic polynomial, a lower lid curve in a quadratic polynomial,
and an iris circle. The iris center and radius are estimated by
the algorithm developed by Ahlberg [23]. This is based on
the assumptions that the iris is approximately circular and
dark against the background, that is, the eye white. Conven-
tional approaches of eyelid contour detection use deformable
contour models attr acted as a result of the high values of the
luminance edge gradient [24]. Deformable models require
the careful formulation of the energy term and good initial-
ization, otherwise an unexpected contour extraction result
may be acquired. Moreover, it is undesirable to use lumi-
nance edges for contour detection, because eye area may have
many outlier edges.
This paper proposes a novel technique that achieves both
stability and accuracy. Taking the luminance values along a
single horizontal row of an eye image as a scalar function
L
y
(x), it can be seen that the significant local minima cor-
respond to the eye boundary points, as shown in Figure 5.
This observation is valid for many images taken under very
different lighting conditions and qualities. The detected can-
didate pixels of the eye boundary are filtered to remove the
outliers before fitting a curve to the upper eyelid points. On
the other hand, the lower lid is detected by fitting the eye
corners and the lower point of the iris circle with a quadratic
curve.
The eyebrows can be detected simply by fitting parabolas
to the dark pixels after binarizing the luminance image in the
areas above the eye bounding boxes.
2.4. Lip contour detection
In most cases, the lip color differs sig nificantly from that
of the skin. Iteratively refined skin and lip color models are
used to discriminate the lip pixels from the surrounding skin.
The pixels classified as skin at the face detection stage and
located inside the face ellipse are used to build a person-
specific skin-color histogram. The pixels with low values of a
剩余18页未读,继续阅读
2018-02-09 上传
2009-09-03 上传
2023-06-09 上传
2023-06-13 上传
2023-06-03 上传
2023-06-12 上传
2023-05-11 上传
2023-05-24 上传
2023-05-20 上传
2023-06-07 上传

yingbinwu
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Postman安装与功能详解:适用于API测试与HTTP请求
- Dart打造简易Web服务器教程:simple-server-dart
- FFmpeg 4.4 快速搭建与环境变量配置教程
- 牛顿井在围棋中的应用:利用牛顿多项式求根技术
- SpringBoot结合MySQL实现MQTT消息持久化教程
- C语言实现水仙花数输出方法详解
- Avatar_Utils库1.0.10版本发布,Python开发者必备工具
- Python爬虫实现漫画榜单数据处理与可视化分析
- 解压缩教材程序文件的正确方法
- 快速搭建Spring Boot Web项目实战指南
- Avatar Utils 1.8.1 工具包的安装与使用指南
- GatewayWorker扩展包压缩文件的下载与使用指南
- 实现饮食目标的开源Visual Basic编码程序
- 打造个性化O'RLY动物封面生成器
- Avatar_Utils库打包文件安装与使用指南
- Python端口扫描工具的设计与实现要点解析
