掌握控制系统状态空间描述与MATLAB建模
下载需积分: 9 | PPT格式 | 1.39MB |
更新于2024-07-23
| 138 浏览量 | 举报
控制系统的状态空间描述是现代控制理论中的核心概念,它将复杂的动态系统转化为一组数学模型,便于分析和设计。本章主要涵盖了离散系统和连续系统的状态空间表示方法,以及与之相关的关键概念。
1. 状态空间描述:这是控制理论的基础,它将系统的当前状态视为描述其行为的关键要素。状态通常包括物理量,如位置、速度、加速度等,或者非物理量,如存储的信息。状态变量是描述系统状态的最基本变量,它们是互相独立的,且数量足够描述系统的全部运动特性。
2. 状态变量:状态变量是完全描述系统状态的最小集合,一个系统的状态向量就是这些变量的组合。初始状态变量包含了过去输入信息的痕迹,随着时间的推移,这些变量决定了系统未来的动态变化。
3. 状态空间:状态空间是一个多维空间,其中每个维度代表一个状态变量。系统在任一时刻的状态通过状态向量表示,这个向量在状态空间中的位置反映了系统的即时状态。
4. 状态轨迹:由系统初始状态出发,随着时间的流逝,状态向量在状态空间中描绘出一条轨迹,这条轨迹反映了系统的运动过程。
5. 状态方程:是描述系统状态变量随时间变化的微分方程组,它揭示了输入变量与状态变量之间的关系,以及每个状态变量自身的动态特性。状态方程是控制系统的数学核心,用于分析稳定性、可控性和可观测性等性质。
6. 离散系统:针对时间上离散变化的情况,状态空间描述会采用离散状态变量和方程,这对于数字信号处理和计算机控制等领域非常重要。
7. MATLAB:作为强大的数值计算工具,MATLAB被广泛用于控制系统的数学建模和模型转换。用户可以通过MATLAB进行状态空间模型的设定、仿真和分析,方便快捷。
理解并掌握控制系统的状态空间描述对于设计、分析和优化实际控制系统至关重要,无论是理论研究还是工程实践,都是不可或缺的技能。通过深入学习这些概念,工程师能够更好地理解和操控复杂系统的动态行为。
21/8/6
11
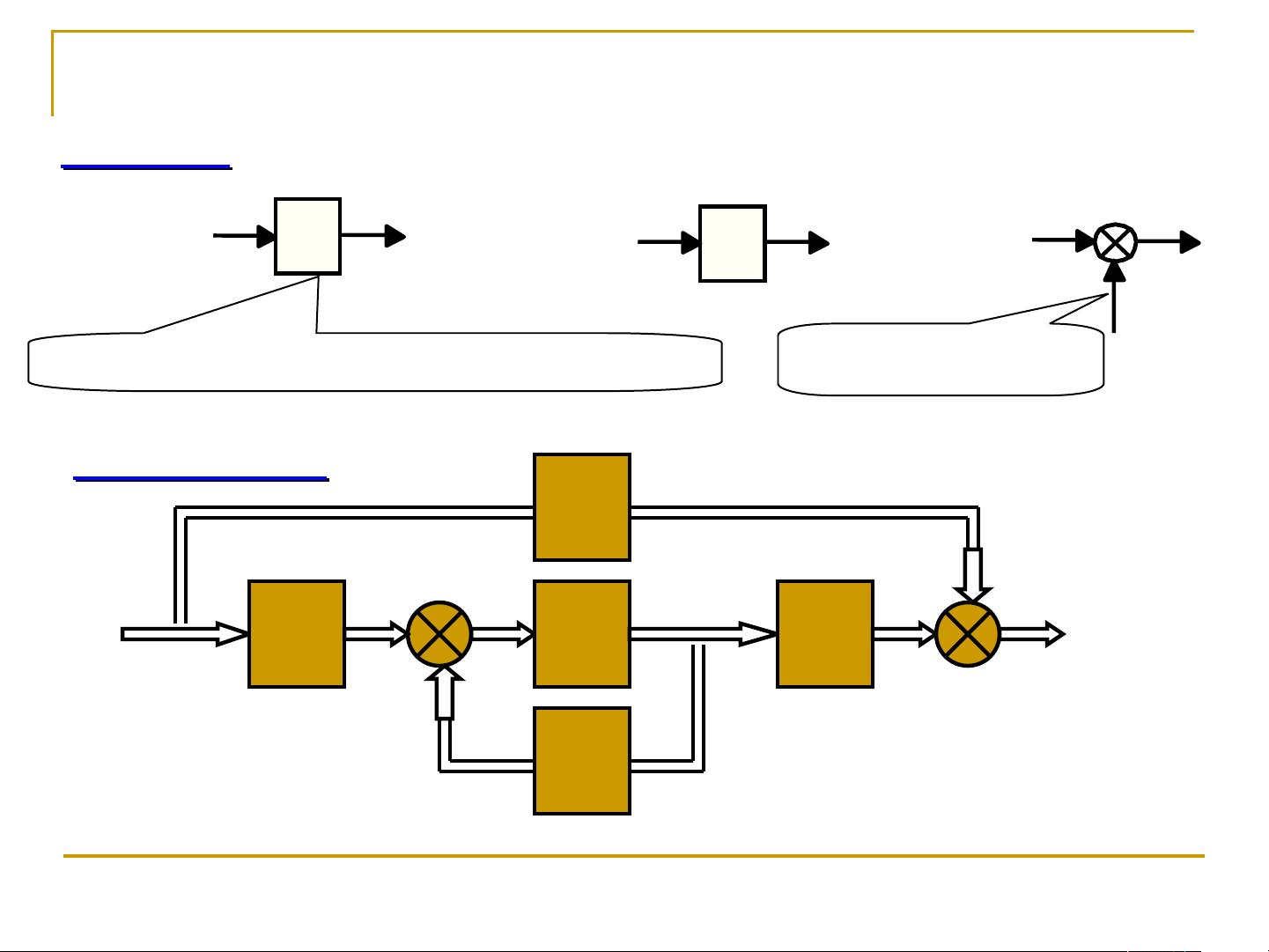
(3) 定常系统: A,B,C,D 各元素与时间无关;
时变系统: A,B,C,D 中的各元素一部分或全部是时间的函数;
定常系统 ; 时变系统
(5) 系统输出与状态的区别:
系统输出:希望丛系统中测得的信息,物理上可以量测到;
系统状态:描述系统内部行为的信息,物理上不一定可观测。
),,,( DCBA
))(),(),(),(( tDtCtBtA
(4) 非线性系统状态空间表达式: 和 是 x 与 u 的某类
非线性函数。可以用线性系统来近似
i
f
i
g
剩余63页未读,继续阅读
相关推荐





qiuhuansong
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
