




模糊PID控制器设计与参数自整定
需积分: 23 143 浏览量
更新于2024-08-03
收藏 367KB PDF 举报
"本文主要探讨了参数自整定模糊PID控制器的设计,包括传统PID控制原理和模糊PID控制原理。文章通过MATLAB仿真展示了模糊规则在控制器中的应用,并提供了相关的仿真结果。"
1、传统PID控制原理
传统的比例积分微分(PID)控制器是一种广泛应用的反馈控制算法。其离散形式的表达式为 \( u(k) = k_p e(k) + \frac{k_i}{z} \sum_{j=0}^{k} e(j) + k_d \frac{d}{dz} ec(k) \),其中 \( u(k) \) 是控制器在第 \( k \) 次采样的输出,\( e(k) \) 和 \( ec(k) \) 分别是系统偏差和偏差变化量,\( k_p \)、\( k_i \) 和 \( k_d \) 是比例、积分和微分系数。这些参数需要根据具体系统进行精细调整,以达到期望的控制性能。
2、模糊PID控制原理
参数自整定模糊PID控制器引入了模糊逻辑,其基本思路是建立PID参数(\( kp \)、\( ki \)、\( kd \))与误差 \( e \) 和误差变化率 \( ec \) 的模糊关系。控制器在运行过程中实时监测这两个变量,然后基于模糊控制规则动态调整参数,使得 \( kp \)、\( ki \) 和 \( kd \) 能够适应系统状态的变化。公式表示为 \( kp = kp_0 + \Delta kp \),\( ki = ki_0 + \Delta ki \),\( kd = kd_0 + \Delta kd \),其中 \( kp_0 \)、\( ki_0 \)、\( kd_0 \) 是初始参数值。
2.1 输入输出变量的模糊隶属度函数
为了实现模糊控制,需要定义输入变量(误差 \( e \) 和误差变化率 \( ec \))和输出变量(参数修正量 \( \Delta kp \)、\( \Delta ki \)、\( \Delta kd \))的模糊子集。这里采用的语言变量有7个,分别是{正大(PB)、正中(PM)、正小(PS)、零(ZE)、负小(NS)、负中(NM)、负大(NB)},对应的模糊论域是均匀且全交叠的三角形隶属度函数。
2.2 模糊控制规则
模糊控制规则是根据偏差和偏差变化率对PID参数的具体要求以及实际经验得出的。例如,表1、表2和表3列出了修正量 \( \Delta kp \)、\( \Delta ki \) 和 \( \Delta kd \) 的模糊控制规则,这些规则描述了在不同偏差和偏差变化率情况下,参数如何调整以优化控制效果。
模糊PID控制器通过模糊逻辑实现了参数的自整定,可以根据系统的实时状态动态调整PID参数,以提高控制性能和适应性。MATLAB仿真是验证和优化这种控制策略的有效工具,可以提供关于控制器性能的直观理解。
参数自整定模糊PID控制器的设计
1、传统PID控制原理
传统PID控制器离散表达式为
u
(
k
)
= k
p
e
(
k
)
+ k
i
�e
(
j
)
+ k
d
k
j=0
ec(k)
其中:u(k)为第k次采样时刻控制器的输出;e(k)、ec(k)分别为系统偏差、偏差变化量;kp、ki、kd
分别为比例系数、积分系数、微分系数。PID控制器通过对3个控制参数的整定,从而获得良好的系
统控制性能。
2、模糊PID控制原理
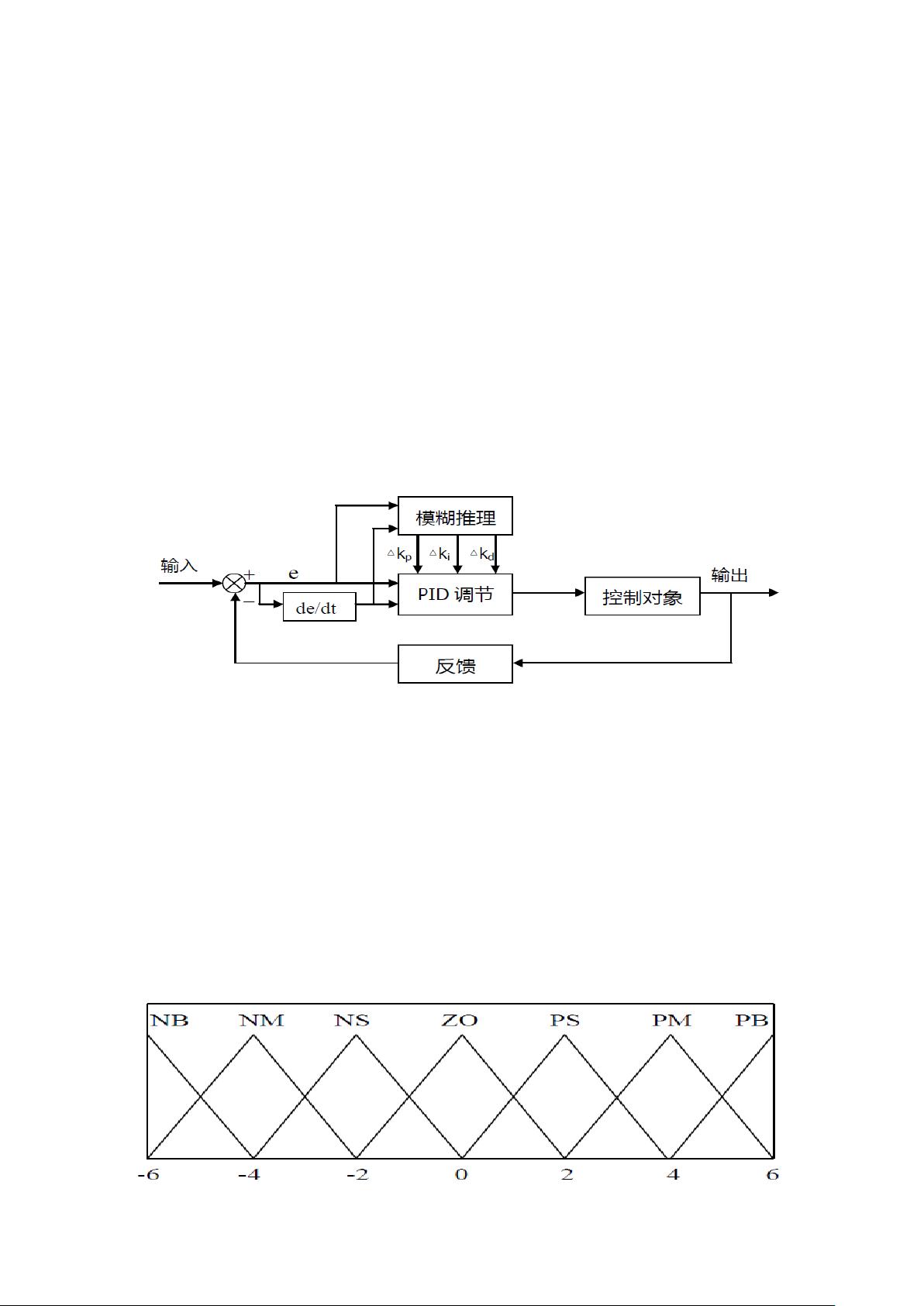
参数自整定模糊 PID 系统原理结构如图 1 所示
图 1 模糊 PID 控制器原理框图
该控制器设计思想是先找出PID三个参数与温度误差e和误差变化率ec之间的模糊关系,在运行
中不断检测e和ec,再根据模糊控制原理对三个参数进行在线整定,从而获得新的kp、ki、kd,去控
制对象的输出。经过模糊推理对参数进行修正后,kp、ki、kd将不是3个固定值,而是能够根据工
况变化而自动调整的参数。PID参数表达式为
kp=kp0+△kp;ki=ki0+△ki;kd=kd0+△kd
其中,kp0、 ki0 、kd0为PID参数的初始值。
2.1 输入输出变量隶属度函数的确定
将偏差e和偏差变化率ec及参数kp、ki、kd离散为7个模糊子集,其语言变量为{正大(PB)、正中
(PM)、正小(PS)、零(ZE)、负小(NS)、负中(NM)、负大(NB)},模糊论域均为{-6,-5,-4,-3,-2,
-1,0,l,2,3,4,5,6},隶属度函数均为三角形、均匀分布和全交叠隶属度函数。各变量隶属
度函数见图2。
图2 变量隶属度函数
下载后可阅读完整内容,剩余9页未读,立即下载
2021-10-16 上传
932 浏览量
点击了解资源详情
2021-05-16 上传
2021-06-29 上传
108 浏览量
128 浏览量
163 浏览量
302 浏览量

凡夫俗子01
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开








最新资源
- CUGCtrl表格控件——提升开发效率的利器
- 药店管理系统免费版及其详细参考文档介绍
- VB语言开发的完整服装进销存系统资料
- Matlab SVM入门文档整理与美化分享
- React Hooks 简易指南教程
- Visual C++实现中间件COM组件开发与测试
- MFC链表实现通讯录的学生管理系统设计
- 提升数据分析技能的十大建议及PPT模板下载
- Objective-C 2.0习题解答指南
- RxJava&RxAndroid使用示例与手册解析
- Java Swing编程原理与多线程实战指南
- JavaScript实现动态树菜单绑定技术解析
- Windows 7系统中Kingdom Rush 1.08存档解压缩指南
- React项目入门及脚本使用指南
- 水文分析中的皮尔逊三型曲线MATLAB实现
- 获取Microsoft旧版C++编译器的源代码文件






















