导航寻路解析:Dijkstra算法与社交网优化策略
需积分: 50 38 浏览量
更新于2024-07-18
1
收藏 2.91MB PPT 举报
路网最优路径算法详述
在导航和游戏地图寻路中,最短路径算法是一项核心技术,它用于确定两点之间的最佳移动路线,以达到最小化成本或时间的目的。本文将深入探讨路网最优路径算法的各个方面,包括其背景、应用场景以及各种经典和优化策略。
1. **背景与社交网络应用**:
路网最优路径算法最初应用于地图导航系统,如GPS导航,以找到最短或最快到达目的地的路线。在社交网络中,例如寻找从一个人到另一个著名人物的最短联系路径,算法也发挥着关键作用,如描述中的“社交网寻路问题”。
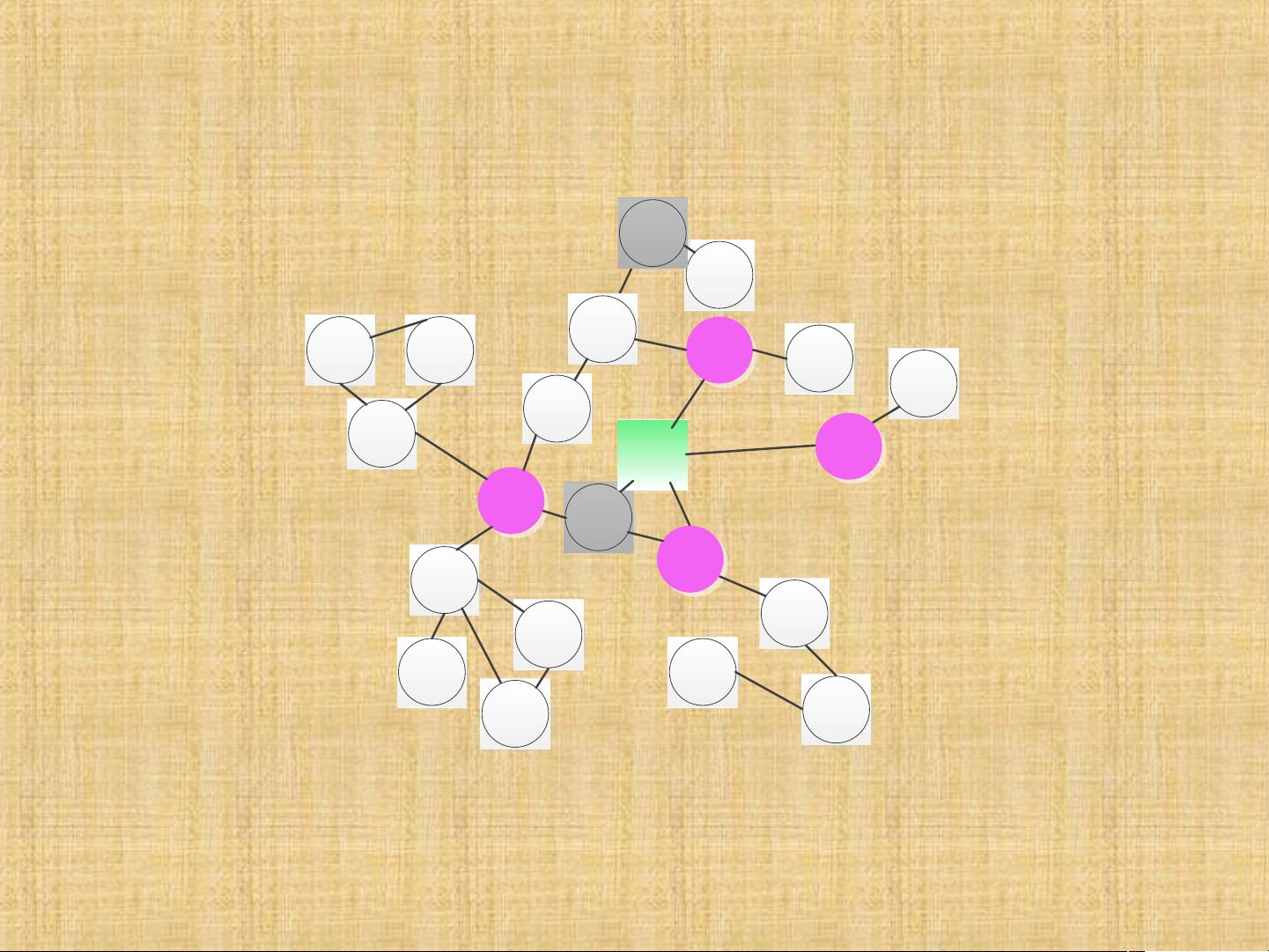
2. **经典算法—Dijkstra算法**:
Dijkstra算法是首选的最短路径算法,适用于没有负权边的图中。它以起始节点为起点,逐步扩展搜索范围,直到找到目标节点,记录每步路径长度。搜索过程分为多个步骤,展示了算法的具体执行步骤,如搜索过程14个步骤详细说明了节点的涂色和优先级排序。
3. **优化策略**:
- **A*算法**:为了解决Dijkstra算法可能遇到的效率问题,引入了A*算法,它结合了实际代价(d(s))和启发式信息(h(t)),通过预先估计距离来缩小搜索范围,提高搜索效率。
- **搜索范围的缩小**:通过提前终止条件或动态调整搜索策略,限制搜索区域,避免“南辕北辙”现象。
- **双向搜索**:对于某些情况,双向搜索可以同时从起点和终点出发,减少路径长度计算的时间。
4. **路径的相对性和最优定义**:
最优路径的定义取决于不同的需求,比如速度、成本或便捷性。对于不同用户,如路人甲、乙、丙,他们对“最优”的理解可能存在差异,可能更倾向于高速路、畅通路或风景优美的路线。
5. **路网特点与代价模型**:
路网具有节点度数低、边有等级划分、更新不频繁等特点。这些特性影响了路径算法的选择和效果,如道路代价模型决定了路径的质量,而算法本身的性能则影响响应速度。
6. **未来挑战**:
随着实时数据更新和大数据分析的发展,未来的挑战包括如何处理大规模、动态变化的路网信息,以及如何在实时环境中提供更加个性化的路径推荐。
总结来说,路网最优路径算法是一门涉及多个方面的技术,包括基本的搜索策略(如Dijkstra)、优化技巧(如A*和双向搜索),以及如何适应不同应用场景和用户需求。在实际应用中,理解和掌握这些算法至关重要,它们直接影响到导航系统的效率和用户体验。
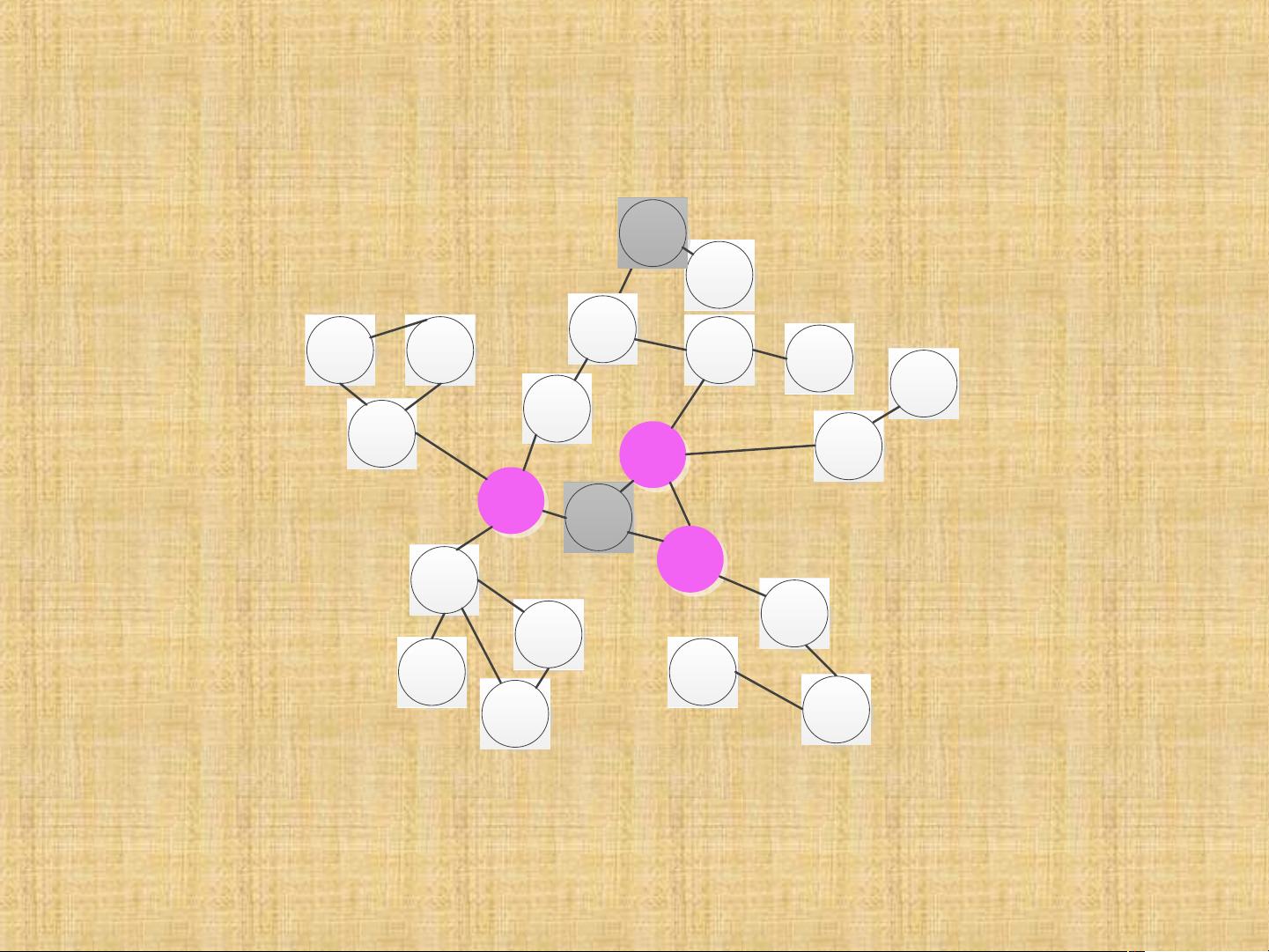
路径算法— Dijkstra 1/14
搜索过程
S
T
剩余41页未读,继续阅读
340 浏览量
296 浏览量
196 浏览量
291 浏览量
164 浏览量
251 浏览量
270 浏览量

人生如梦也非梦
- 粉丝: 17
 我的内容管理
展开
我的内容管理
展开







最新资源
- 支付宝订单监控免签工具:实时监控与信息通知
- 一键永久删除QQ空间说说的绿色软件
- Appleseeds训练营第4周JavaScript练习
- 免费HTML转CHM工具:将网页文档化简成章
- 奇热剧集站SEO优化模板下载
- Python xlrd库:实用指南与Excel文件读取
- Genegraph:通过GraphQL API使用Apache Jena展示RDF基因数据
- CRRedist2008与CRRedist2005压缩包文件对比分析
- SDB交流伺服驱动系统选型指南与性能解析
- Android平台简易PDF阅读器的实现与应用
- Mybatis实现数据库物理分页的插件源码解析
- Docker Swarm实例解析与操作指南
- iOS平台GTMBase64文件的使用及解密
- 实现jQuery自定义右键菜单的代码示例
- PDF处理必备:掌握pdfbox与fontbox jar包
- Java推箱子游戏完整源代码分享
