伯克利大学机电前瞻技术:40年研究精华
需积分: 1 159 浏览量
更新于2024-07-18
收藏 9.54MB PDF 举报
加州伯克利大学机械系统控制实验室(Mechanical Systems Control Laboratory)的最新研究报告集合,收录于2013年8月出版的"Automotive AI ROBOT"主题论文集中,展示了该实验室在机器人技术与智能车辆领域的前沿研究成果。作为拥有近40年历史的研究机构,伯克利大学的这个实验室在精密运动控制、机器人控制、车辆控制和机电一体化等关键领域进行了开创性的工作。
实验室通常有大约15至20名研究生和5至10位访问学者,包括进修学生研究者、客座学者及工业界同仁,共同推动科研进展。这份论文集旨在向读者展示实验室成员正在进行的项目,展示了他们在过去四十年间所取得的显著成就。至今,超过100名学生在这里完成了博士学位,并在学术界和业界成为领导者。
知名教授Masayoshi Tomizuka和Cheryl Valentine、John Neerhout Jr.是该实验室的杰出代表,他们分别担任机械工程系的杰出教授,他们的研究对整个领域产生了深远影响。论文集的目录包含了详细的前言,概述了实验室的历史、人员构成以及研究背景,紧接着是各个项目的详细介绍,展示了他们在自动驾驶技术、人工智能应用以及机器人技术方面的创新成果。
通过阅读这本书,读者不仅能了解到最新的技术动态,还能窥见伯克利大学在培养未来科技领袖方面的重要角色。这些博士毕业生的名单和论文标题,揭示了他们在各自领域的专业深度和广度,为读者提供了宝贵的参考和启示。总体而言,这份报告是了解加州伯克利大学机电前瞻技术的窗口,对于对该领域感兴趣的学生、研究人员和行业从业者来说,具有极高的价值。
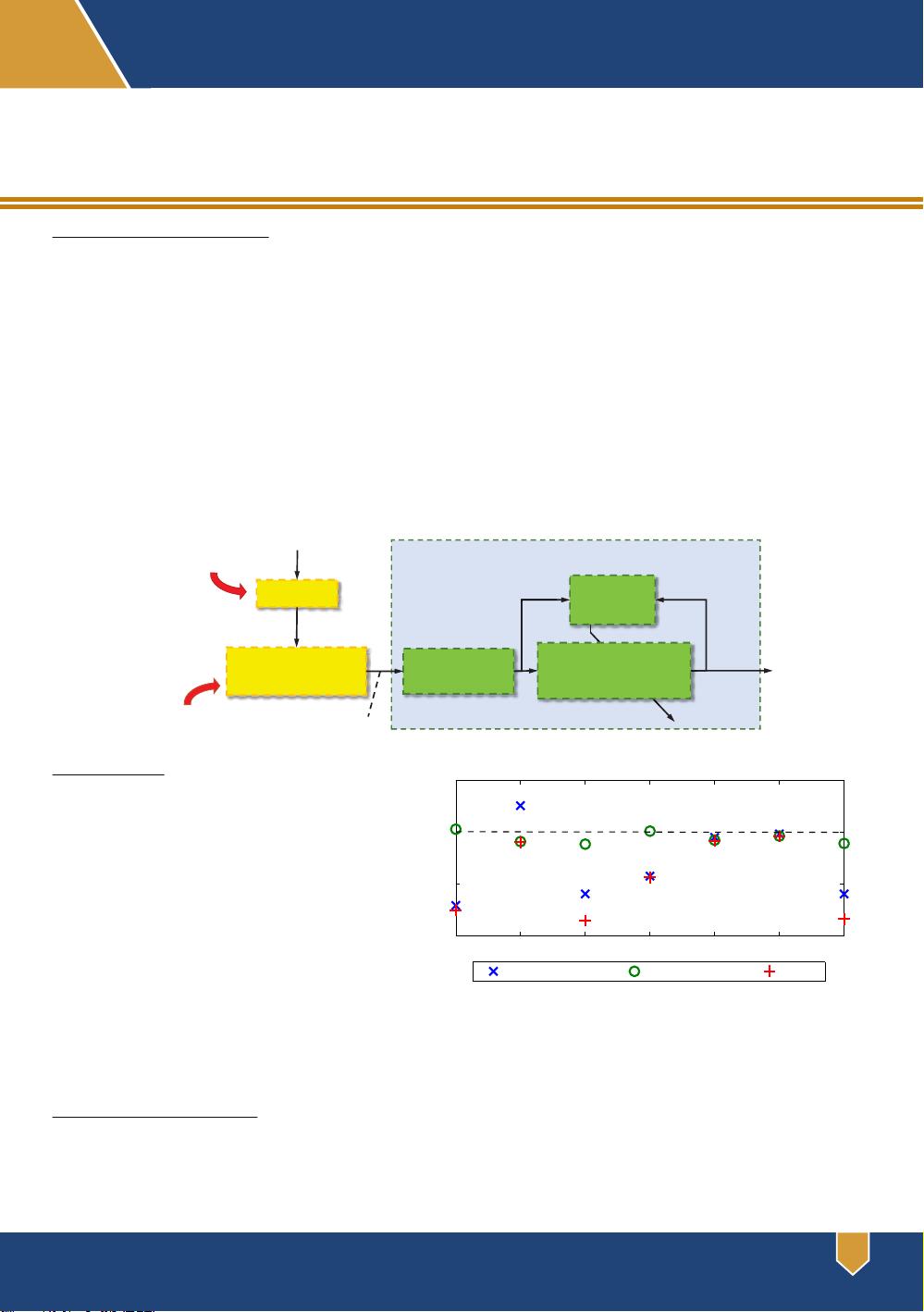
control is less reliable than wired control due to packet loss, time delay, and packet disorder caused by
wireless communication. A Bernoulli random process was used to model the possible packet loss. A
modied LQG control with a disturbance observer (DOB) was proposed to control the cRSEA under packet
loss [1]. Under the situation when future references can be previewed, the preview control technique was
extended so that the previewed reference signal can be used for improved tracking performance [2]. To deal
with time-varying delays, a communication disturbance observer (CDOB) was investigated [3]. A wireless
control system was built using WirelessHART protocol to test the performance of proposed controllers [4].
Le Upper: experimental setup of the wireless control system; Le Lower: block diagram of the modied LQG controller;
Right: experimental results with 30% packet loss
Main Result
All the algorithms proposed above have been tested and veried by simulations and experiments. For
packet loss compensation, experimental results of the modied LQG controller are shown in the gure
above. For the control system with 30% packet loss, the proposed controller can still guarantee that accurate
assistive torque would be generated [1, 4]. Modied preview control could improve the tracking
performance with previewed reference signals if the preview time is long enough [2]. The proposed CDOB
could guarantee the stability of the wireless tracking control system under varying and unknown time
delays [3].
Recent Key Publications
[1] J. Bae, W. Zhang, and M. Tomizuka, “Network-Based Rehabilitation System for Improved Mobility and
Tele-Rehabilitation,” IEEE Transactions on Control Systems Technology, to appear, 2013
[2] W. Zhang, J. Bae, and M. Tomizuka, “Modied Preview Control for a Wireless Tracking Control System with Packet
Loss", in Proceedings of 2012 ASME Dynamic System and Control Conference (DSCC), pp. 2524-2533, 2012 (Semi-Plenary
Paper Award Finalist)
[3] W. Zhang and M. Tomizuka, “Compensation of Time Delay in a Network-based Gait Rehabilitation System with a
Discrete-time Communication Disturbance Observer,” in Proceedings of IFAC Symposium on Mechatronic Systems, pp.
555-562, 2013.
[4] W. Zhang, X. Zhu, S. Han, N. Byl, A. K. Mok, and M. Tomizuka, “Design of a Network-based Mobile Gait
Rehabilitation System,” in Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO), pp.
1773-1778, 2012.
Researcher: Wenjie Chen (Postdoctoral researcher), Junkai Lu (Graduate student),
Kevin Haninger (Graduate student)
Recent Graduate: Joonbum Bae (UNIST, Korea)
Sponsor: National Science Foundation (NSF)
Introduction
The integration of a brain-machine interface (BMI) and an exoskeleton has the potential to
promote the understanding of fundamental principles in the neural control of movements, as
well as to motivate a new generation of rehabilitation or power augmentation exoskeleton
systems. This research focuses on the design and control of a multiple degrees of freedom
(DOF) upper limb exoskeleton for BMI macaques to achieve: 1) data acquisition (by torque
control) and 2) motion actuation (by impedance/position control), providing proprioceptive feedbacks to
help establish a closed-loop BMI system. Collaborators are researchers from the labs of Professor Jose
Carmena and Professor Claire Tomlin at UC Berkeley working on, respectively, neural decoder design and
hybrid system scheme identication and control. Our eort by now has been devoted to design and control
of the upper-limb exoskeleton including kinematic design and analysis, torque reecting actuator design,
as well as hardware fabrication.
6-DOF Passive Exoskeleton for Macaque Upper-limb
Motivation and Approach
When operated in tracking mode where
macaque's arm is free to do arbitrary motion, a
singularity-free design of the shoulder complex is
essential for both precise tracking and safety
concerns. To achieve this, a 6-DOF passive
prototype exoskeleton with 4 DOFs at the
shoulder complex is proposed and fabricated.
The following studies are further conducted:
1) Kinematics is analyzed for the proposed
shoulder complex model
a. Manipulability comparison is
conducted with other designs of
dierent DOF assignments
b. Feasibility of singularity and
joint limits avoidance during tracking task is veried based on backward reachability
analysis
2) Home positions of incremental encoders are calibrated based on an external optical mocap system
a. Encoder initial osets are identied by solving a nonlinear least squares problem
b. Cross-validations are completed using data sets from dierent experimental sessions
Main Results
1) Each posture’s possession of dierent levels of
manipulabilities due to redundancy makes it
possible to avoid singularities by properly
planning the trajectories in tracking task. The
gure below shows that the proposed model is
able to achieve its maximum manipulability in
each direction on the horizontal plane [1].
2) By regarding unpredictable macaque's desired task
space motion as disturbance, exoskeleton joint space
trajectory as control input, game theory based
backward reachability analysis demonstrates that
there always exists a joint trajectory along which
system will not enter unsafe neighborhood of
singularity and joint limits for the normal BMI task
workspace [1].
3) RMS error of the calibrated 3D end point position is
approximately 2 mm. The above right is a plot of sampled marker positions in the mocap camera
frame for both reference data and data generated with identied encoder parameters.
Recent Key Publications
[1] J. Lu, W. Chen, and M. Tomizuka, "Kinematic Design and Analysis of a 6-DOF Upper Limb Exoskeleton Model for a
Brain-Machine Interface Study," in Proceedings of the 6th IFAC Symposium on Mechatronic Systems, pp. 293-300, 2013
(Best Student Paper Finalist)
Motorized Exoskeleton Design for Macaque Upper-limb
Motivation and Approach
The proposed motorized exoskeleton is able to work in three control modes: 1) torque control mode to
passively collect kinematic data as the exoskeleton tracks macaques’ voluntary arm movements; 2) position
control mode to bring the arm and exoskeleton to spatial targets following decoded neural signals; and 3)
impedance control mode to act as a source of mechanical perturbations that macaques should resist by
stiening their arms. To achieve safe, natural motion, the following two subtopics from kinematic and
dynamic aspects of the exoskeleton design are conducted.
Kinematic Design
To allow for safe interaction between an external mechanism and biological joints, care must be taken to
apply external torques along the axis imposed by the biological joint. Due to the structure of most biological
joints, the instantaneous center of rotation (e.g., monkey’s shoulder center) may vary according to the angle
of the joint.
To characterize the behavior of the shoulder center in macaques, analysis was performed on the motion of
the upper arm. Motion capture data was obtained for a sedated monkey (with markers along the upper arm
and torso), as the arm was moved through a variety of postures. This data was partitioned according to the
elevation of the arm (roughly speaking, the angle made between the humerus and the spine). The shoulder
center was then found by comparing the position of arm markers in multiple frames, and nding the
intersection of axes which describe the rigid body transformation between them. A kinematic design
matching with this kinematic/morphological analysis is currently being investigated.
Actuator Design
Due to limited space at the macaque’s joint side, a cable-driven mechanism is most ideal for lightweight and
compact joint side design. To achieve back-drivability and torque-reecting, serial elastic mechanisms will
be adopted at each of the designed upper-limb joint sides. Bowden cables connecting from the joint side will
be driven remotely by the geared DC motors. To reduce sensing complexity and cost at the motor side,
friction characteristics of the transmission train will be rst identied and then robust/adaptive
controllers will be synthesized for output torque estimation and
generation.
3D Target Presenting System
This device was designed and constructed to allow automatic
arbitrary 3D placement of two targets in a 40x40x80 cm
workspace to motivate the BMI subject (macaque) through a
variety of reaching paths.
Researcher: Wenjie Chen (Postdoctoral researcher), Robert Mahew (Graduate student),
Changliu Liu (Graduate student)
Introduction
As robotic devices are becoming more ubiquitous in the modern world, human-robot
interaction is becoming a necessity. Human muscle’s natural stiness varies in dierent task
scenarios. This biological feature motivates the development of a compliant actuator with
adjustable stiness to ensure the safety and comfort of human users while maintaining
performance. In other words, Variable Stiness Actuators (VSAs) and the corresponding intelligent control
are desired to provide the exibility by changing their compliance to suit the variable tasks given.
Experimental Setup
To perform this research, we have constructed a test rig capable of
accurately measuring the position and torque of a VSA device. Using
this setup we can test both the static and dynamic properties of such
devices. The test device itself comprises of a set of standardized
mounting brackets, to which high resolution optical indexing
encoders are mounted. Motor control and data acquisition are
performed using a real-time operating system.
A Proposed VSA Design
One of the designs we are
currently investigating uses a
variable length fulcrum to
change the eective stiness of
two linear springs. By varying the
positions of these two springs,
the eective rotational joint
stiness of the series elastic
actuator can be changed
continuously allowing for the dynamic properties to be tuned to suit the desired application.
Control Strategy
We are currently investigating a hybrid system control strategy that ts the inherent characteristics of such
devices and applications involving the stiness changes. In a hybrid framework, the dynamics of each mode
will be characterized for each task segmentation and a set of dierent controllers will be synthesized to
provide optimal performance. By varying actuator stiness, the system dynamics can be altered at a
mechanical level, requiring the hybrid feedforward/feedback controllers with adaptation capabilities to be
properly realized and switched for each segment.
Potential Applications
By varying the stiness of an actuator, we are able to protect both the actuator and interfacing devices by
allowing for exibility in their movements. This can be of use in human assistive devices where it is
important to not apply impulse loads to the user. These devices can also be used to tune the resonance of a
device which stores /dissipates energy.
Researcher: Chi-Shen Tsai (Graduate student)
Recent Graduate: Shu-Wen Yu (Areva)
Sponsor: Industrial Technology Research Institute (ITRI), Taiwan
Introduction
With the growing need for humans and robots to share a workspace and/or task, the safety of
human-robot collaboration/cooperation has been gaining increased research aention. To
guarantee the safety of human workers, robot systems should be able to perceive the complex
environment, react to any unexpected human workers on its planned trajectory, and continue on the task if
possible. It involves on-line path planning and reactive control. Experiments on a two-link planar robot and
simulations on an ITRI 7-DOF robot are conducted for validation. Furthermore, the algorithm may be
applied with lile change to the dynamic trajectory generation
in robot-robot cooperation under a decentralized master-slave
control structure.
Experimental Setup
BI-Jacket & Potential Field Based Methods
Motivation and Approach
In human-robot collaboration, the safety of the human worker has higher priority than achieving the task in
the robot system. Hence the robot safety system should be able to:
1. Detect the human worker and the potential collisions via non-contact sensor.
2. Avoid the potential collision and detour to the goal if possible.
3. Provide the last shield of protection as the fail-safe mechanism if the detection algorithm fails.
Main Results
The ultrasonic sensors mounted on the robot are used to build
the local map, in which the approximate positions of objects in
the vicinity of the robot can be extracted. With the position
information, the potential eld method is implemented to
control the robot and achieve collision avoidance in real-time.
The BI-Jacket, consisting of a so deformable substance and air
pressure sensors, is mounted on the critical part of the link on
the robot. The BI (Berkeley-ITRI)-Jacket not only provides a buer
between the human worker and the robot when a collision
actually happens, but also detects the occurrence of the collision by monitoring the air pressure change
inside the BI-Jacket.
Two-link robot to achieve obstacle (white tube) avoidance in motion pictures
Dynamic Trajectory Generation via Safety Index
Motivation and Approach
In order for the robot to react to the complex environment and unexpected objects properly, an eective
quantitative measure about the safety in the vicinity of the robot is necessary. For this, the safety index is
dened, which consists of distance safety index (DSI) and momentum safety index (MSI). DSI is
self-explanatory, i.e., a shorter distance between the robot and an object indicating a higher DSI value. MSI,
on the other hand, accounts for the linear momentum of every link on the robot towards an object in the
workspace of the robot.
The robot reacts to those objects, either a human worker or another robot, by generating a new trajectory
on-line. The trajectory generation is based on solving an optimization problem which penalizes the safety
index and the time to accomplish the original task.
Researcher: Wenjie Chen (Postdoctoral researcher),
Pedro Reynoso-Mora (Graduate student), Michael Chan (Graduate student),
Cong Wang (Graduate student), Chung-Yen Lin (Graduate student),
Ernesto Solanes (Visiting student)
Recent Cheng-Huei Han (GE Research, Germany),
Graduate: Chun-Chih Wang (Formfactor),
Soo Jeon (University of Waterloo, Canada)
Sponsor: FANUC Corporation
Introduction
Designing high-performance and low-cost robot manipulators is one of the ultimate
challenges for engineers today. Key performance criteria for these robots are: 1) speed, 2)
accuracy and repeatability, 3) vibration suppression, and 4) cost. In striving to meet these
increasingly stringent performance goals, a mechatronic approach, which combines aspects
from both mechanical hardware and servo soware, is required. This research focuses on
learning control, vision sensing dynamics compensation, kinematic visual servoing, and
automatic sensor frame identication. The project utilizes an integrated analytical, simulation, and
experimental eort to aain the objectives.
Experimental Setup
Iterative Learning Control (ILC)
Motivation and Approach
To compensate for the repetitive tracking error of automated systems in repetitive industrial applications,
the feedforward control inputs (
"τ
nl
" and "r
q
"
below) are updated iteratively by processing the error
information from previous iterations.
1) Model industrial robot (blue shaded area "Robot Plant") as a MIMO system, where
a. disturbance "d" is in a dierent channel from the control input "u", and
b. real-time feedback signal "q
m
" is not the output of interest "q
l
"
2) Design a hybrid dual-stage ILC scheme
a. Torque ILC (TrqILC, yellow shaded area "
τ
nl
") to compensate for the model uncertainty &
disturbances to make the inner plant (orange shaded area) behave as a nominal model
b. Reference ILC (RefILC, yellow shaded area "
r
q
") to compensate for the joint exibility
c. Ad hoc hybrid scheme: iteration-varying gain for dual-stage transition
Main Results
1) Position tracking and vibration
reduction: applications to both
single-joint and multi-joint robots
with joint elasticity [1, 4, 5] (right
gure: proposed hybrid dual stage
ILC scheme (RefILC(L)+TrqILC(L))
outperforms either single stage ILC
(RefILC(L) or TrqILC(L)) or dual
stage ILC with mismatched learning
(RefILC(M)+TrqILC(M)) in the vibration suppression of FANUC M-16iB robot).
2) Considering link (beam) exibility: application to large size LCD substrate transfer robot for
vibration reduction [2].
3) Learning for general motions: train multiple neural networks for predicting the model following
error in a multi-joint robot without further learning or sensing aer training stage [3].
Recent Key Publications
[1] W. Chen, and M. Tomizuka, "Dual-Stage Iterative Learning Control for MIMO Mismatched System with Application
to Robots with Joint Elasticity," IEEE Transactions on Control Systems Technology, DOI: 10.1109/TCST.2013.2279652
[2] C-S. Tsai, W. Chen, D-K. Yun, and M. Tomizuka, "Iterative Learning Control for Vibration Reduction in Industrial
Robots with Link Flexibility," in Proceedings of the 2013 American Control Conference (ACC), Washington, DC, June
17-19, 2013
[3] J. Asensio, W. Chen, and M. Tomizuka, "Robot Learning Control Based on Neural Network Prediction," in Proceedings
of the 2012 ASME Dynamic Systems and Control Conference (DSCC), pp. 1489-1497, October 17-19, 2012
[4] W. Chen, and M. Tomizuka, "Iterative Learning Control with Sensor Fusion for Robots with Mismatched Dynamics
and Mismatched Sensing," inProceedings of the 2012 ASME Dynamic Systems and Control Conference (DSCC), pp.
1480-1488, October 17-19, 2012
[5] W. Chen, and M. Tomizuka, "A Two-Stage Model Based Iterative Learning Control Scheme for a Class of MIMO
Mismatched Linear Systems," inProceedings of the 2012 ASME International Symposium on Flexible Automation (ISFA),
paper No. ISFA2012-7199, June 18-20, 2012
Vision Sensing Dynamics Compensation (VSDC)
Motivation and Approach
In order to compensate for the large feedback time delay, slow sampling rate, lens distortion, and
measurement noise in industrial machine vision systems, a target motion (i.e., position and orientation)
estimation scheme (blue shaded area), Vision Sensing Dynamics Compensation (VSDC) scheme, is
developed.
1) A look-up table was built (green shaded area "Camera calibration") to map the feature information
(contaminated by the lens distortion) from the sensing plane to a virtual plane where the
nonlinear eects are fully corrected [1].
2) A Kalman lter based state estimator was designed (green shaded area “Motion estimation and
prediction”) to provide a real-time state feedback (i.e., target motion in Cartesian space) via
delayed measurements in the image space.
3) The observer was optimized (model and gains, green shaded area “Parameter learning”) to improve
the estimation results.
Main Results
1) Learning target motion
characteristics: combining the
motion estimation block and the
parameter learning block as an
incomplete data Maximum
Likelihood estimation problem
[2].
2) VSDC in Position based visual
servoing (PBSV): application to
the multiple-marker-single-camera conguration. (upper gure: the proposed VSDC scheme
greatly improves the estimation results by both compensating for the sensor dynamics (i.e., delay
compensation) and correctly modeling the target motion characteristics (i.e., parameter learning))
Recent Key Publications
[1] C. Wang, W. Chen, and M. Tomizuka, "Robot End-eector Sensing with Position Sensitive Detector and Inertial
Sensors," in Proceedings of the 2012 IEEE International Conference on Robotics and Automation (ICRA), pp. 5252-5257, 2012
[2] C.-Y. Lin, C. Wang, and M. Tomizuka, "Visual tracking with sensing dynamics compensation using the
Expectation-Maximization algorithm," in Proceedings of the 2013 American Control Conference (ACC), Washington, DC,
June 17-19, 2013
Camera
calibration
Parameter
learning
3D motion estimation
and prediction
estimate of
current target
motion
feature points
w/o distortion
feature points
(image space)
Image acquisition
+ image processing
slow sampling rate
+ large latency
Camera
lens distortion +
measurement noise
target
motion
sequence of
images
X Y Z Roll Pitch Yaw Overall Pos
0
50
100
150
Error Reduction (%)
Effectiveness of the VSD compensator
delay compensation parameter learning VSDC
Kinematic Visual Servoing
Motivation and Approach
Currently, in most applications of vision guided industrial manipulators, the workpiece is either stationary
(e.g., bin picking) or in simple motion (e.g., picking from a conveyor belt). In such applications, a simple
look-then-move control strategy gives good performance. There are, however, desirable applications in
which the workpieces are in more complex motion. Guiding the robot to approach and track a moving target
based on vision feedback is oen termed as visual servoing. Compared to conventional tasks (e.g. welding
and palletizing) where reference trajectory is known in advance, the motion of the robot is planned in
real-time.
1) Rather than the look-then-move scheme, a real-time vision guidance control algorithm is desired.
2) Most industrial robots in use are controlled by trajectory tracking control algorithms. In order to
improve usability for the end user, the conventional trajectory tracking control algorithm should
be preserved and the vision guidance control algorithm should be designed to be an add-on.
3) In order to apply to real-world industrial robots, the limited sampling speed of the vision system
and the limited dynamics response of the actuators should be fully considered.
Main Results
1) Based on the compensated vision feedback from the visual sensing dynamics compensation
(VSDC) algorithm, a two-layer control strategy [1] consisting of kinematic visual servoing (KVS)
and robot dynamics compensation (RDC) is developed using the theory of multi-surface sliding
control. The KVS control law acts as an online motion planner, whereas the RDC control law
preserves the structure of a conventional trajectory tracking controller.
2) Constrained optimal control is applied to address the limited dynamics capability of the robot.
Recent Key Publications
[1] C. Wang, C.-Y. Lin, and M. Tomizuka, "Visual Servoing Considering Sensing Dynamics and Robot Dynamics," in
Proceedings of the 6th IFAC Symposium on Mechatronic Systems, pp. 45-52, 2013 (Best Student Paper Finalist)
Automatic Sensor Frame Identication
Motivation and Approach
In industrial applications, sensor mounting locations may vary due to task variations, which leads to
frequent needs of sensor frame calibration. To simplify the calibration process, and to ensure the accuracy of
the state estimation in robot manipulators, an automatic sensor frame identication process is developed.
This process detects the sensor’s mounting position and orientation by updating the estimate of the sensor
parameter “a” (i.e., the sensor frame location) using multiple sensor signals over a designed trajectory.
1) Design a nonlinear observer (blue shaded area) that provides accurate estimates of robot states.
2) Decouple the sensor frame identication problem (orange shaded area) as two separate problems:
a. Estimate the robot states using an estimate of the sensor parameter.
b. Optimize the sensor parameter by solving the Maximum Likelihood estimation problem
using the estimates of robot states.
Main Results
1) Automation of the calibration process for load side accelerometer: applications to single-joint
robot and multi-joint robots with joint elasticity [1].
2) Observer design for robot manipulators with joint elasticity: the extended Kalman lter (EKF)
based [1] and the stochastic piecewise ane (PWA) model based approaches.
Recent Key Publications
[1] C.-Y. Lin, W. Chen, and M. Tomizuka, "Automatic sensor frame identication in industrial robots with joint
elasticity," in Proceedings of the 2013 ASME Dynamic Systems and Control Conference (DSCC), October 21-23, 2013
Additional Accomplishments to Date
1) Sensor Development and Sensor Fusion
To beer measure and/or estimate the desired robot states in the mismatched robotic systems, a
fast and precise position measurement device called PSD camera was developed in [A4], and several
dynamic and/or kinematic model based sensor fusion methods were developed in [A1-A6] to
integrate the multiple sensor signals from both the motor side and the load side.
2) Automatic Gain Tuning
In order to expedite the gain tuning/validation process, automatic gain tuning methods based on
extremum seeking control algorithm [A7] or iterative feedback tuning scheme [A8] were
investigated.
3) Optimal Trajectory Planning
Without proper compensation, highly accelerating/decelerating motions may induce undesirable
vibrations. Thus, a time optimal approach was proposed in [A9, A10] to plan the robot trajectory
such that it achieves accurate positioning while suppressing residual vibrations.
4) Other more specic control objectives such as vibration suppression and friction
compensation were also studied for the robotic systems with indirect drive mechanisms in
[A11-A13].
Recent Key Publications
[A1] W. Chen, and M. Tomizuka, "Direct Joint Space State Estimation in Robots with Multiple Elastic Joints," IEEE
Transactions on Mechatronics, 2013, DOI: 10.1109/TMECH.2013.2255308
[A2] W. Chen, and M. Tomizuka, "Comparative Study on State Estimation in Elastic Joints," Asian Journal of Control, Vol.
16, No. 3, pp. 1-12, May 2014
[A3] W. Chen, and M. Tomizuka, "Load Side State Estimation in Robot with Joint Elasticity," in Proceedings of the 2012
IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), pp. 598-603, July 11-14, 2012
[A4] C. Wang, W. Chen, and M. Tomizuka, "Robot End-eector Sensing with Position Sensitive Detector and Inertial
Sensors," in Proceedings of the 2012 IEEE International Conference on Robotics and Automation (ICRA), pp. 5252-5257, 2012
[A5] W. Chen, and M. Tomizuka, "Estimation of Load Side Position in Indirect Drive Robots by Sensor Fusion and
Kalman Filtering," in Proceedings of the 2010 American Control Conference (ACC), pp. 6852-6857, June 30-July 2, 2010
[A6] S. Jeon, M. Tomizuka, and T. Katou, "Kinematic Kalman Filter (KKF) for Robot End-Eector Sensing," ASME
Journal of Dynamic Systems, Measurement and Control, Vol. 131, Iss. 2, February 2009 (2010 Rudolf Kalman Best
Paper Award)
[A7] M. Chan, K. Kong, and M. Tomizuka, "Automatic Controller Gain Tuning of a Multiple Joint Robot Based on
Modied Extremum Seeking Control," in Proceedings of the 18th IFAC World Congress, pp. 4131-4136, 2011
[A8] C-C. Wang and M. Tomizuka, "Sensor-based controller tuning of indirect drive trains," in Proceedings of the10th IEEE
International Workshop on Advanced Motion Control, pp.188-193, 26-28 March 2008
[A9] P. Reynoso-Mora, W. Chen, and M. Tomizuka, "On the Time-optimal Trajectory Planning and Control of Robotic
Manipulators Along Predened Paths," in Proceedings of the 2013 American Control Conference (ACC), Washington, DC,
June 17-19, 2013
[A10] P. Reynoso-Mora, and M. Tomizuka, "LQ-Based Trajectory Tracking of Robotic Manipulators With "Near"
Dynamically Feasible Time-Optimal Trajectory," in Proceedings of the 2012 ASME International Symposium on Flexible
Automation (ISFA), paper No. ISFA2012-7271, 2012 (Best Theory Paper Award)
[A11] W. Chen, K. Kong, and M. Tomizuka, "Hybrid Adaptive Friction Compensation of Indirect Drive Trains," in
Proceedings of the 2009 ASME Dynamic Systems and Control Conference (DSCC), pp. 313-320,October 12-14, 2009
[A12] C-H. Han, C-C. Wang, and M. Tomizuka, "Suppression of vibration due to transmission error of harmonic drives
using peak lter with acceleration feedback," in Proceedings of the10th IEEE International Workshop on Advanced Motion
Control, pp.182-187, 26-28 March 2008
[A13] S. Jeon and M. Tomizuka, "Stability of Controlled Mechanical Systems with Ideal Coulomb Friction," ASME
Journal of Dynamic Systems, Measurement, and Control, vol.130, no.1, January, 2008
Researcher: Cong Wang (Graduate student), Xiaowen Yu (Graduate student)
Sponsor: Applied Materials, Inc.
Motivation and Approach
Wafer handling robots are used to transport wafers inside the vacuum environment of IC
fabrication tools. Major concerns for the robot performance are:
1) Speed and acceleration: Fast motion is desired to reduce production time, however, the
wafer is placed on the end-eector of the robot without any xture. Friction is the
only force preventing sliding so acceleration has to be limited to avoid sliding.
2) Accuracy of tracking and positioning: the reference trajectory is designed to be smooth to avoid
sliding. It is important to reduce tracking error to ensure the smoothness of the motion.
3) Vibration and oscillation may cause the sliding of wafers, which generates contaminating particles
and even leads to wafer tip-over.
An IC fabrication tool The wafer handling robot inside an IC fabrication tool
Our research aims at improving the robot control performance in above aspects. Meanwhile, the robustness,
ease of implementation, and ease of tuning shall also be fully considered. Major approaches include:
1) Model-based dynamics compensation.
2) Controller tuning using distributed auxiliary sensing.
3) Disturbance compensation based on adaptive modeling and identication.
Main Results
With the proposed approaches, the reference trajectory can be optimized for maximum smoothness, and the
following error is signicantly reduced by model-based dynamics and disturbance compensation.
Recent Key Publications
[1] X. Yu, C. Wang, Y. Zhao, and M. Tomizuka, "Dynamics Modeling and Identication of a Dual-blade Wafer Handing
Robot," in Proceedings of the Sixth ASME Dynamic Systems and Control Conference(DSCC), 2013
[2] C. Wang, X. Yu, and M. Tomizuka, "Fast Modeling and Identication of Robot Dynamics using the Lasso," in
Proceedings of the Sixth ASME Dynamic Systems and Control Conference(DSCC), 2013
Researcher: Wenlong Zhang (Graduate student), Chen-Yu Chan (Graduate student),
Kan Kanjanapas (Graduate student)
Recent Joonbum Bae (UNIST, Korea),
Graduate: Kyoungchul Kong (Sogang University, Korea)
Sponsor: National Science Foundation (NSF)
Introduction
In this research, a networked mobile assistive system (NMAS) that integrates a physical
assistive device with a high-speed wireless body sensor network is proposed. The proposed
system provides a complete and active health care system to benet the users (e.g. elderly
people, patients with Parkinson’s disease and stroke) and improve the management strategy
of the health care provider (hospitals, physical therapists). Various research topics are under
investigation, including sensor and actuator design, human motion capture and analysis, control of the
rehabilitation device over real-time wireless network, and clinical test of the wireless human motion
monitoring system. This is a joint research project with computer science researchers from University of
Texas, Austin (UTA) and physical therapists from University of California, San Francisco (UCSF).
System Structure and Hardware
Development of Smart Shoes
Motivation and Approach
In the NMAS, gait analysis is employed as the major approach of disease diagnosis and evaluation. To
provide accurate gait detection, four air pressure sensors were embedded in a shoe to measure ground
reaction force (GRF). Based on raw force measurements, fuzzy logic was employed to estimate the current
gait phase [1]. A mobile gait monitoring system (MGMS) was developed to provide real-time visual feedback
to patients for gait correction. Clinical tests were run with patients at the UCSF rehabilitation clinic.
Clinical test of the MGMS (Le: the MGMS in a clinical test; Right: result of the clinical test)
Main Results
The smart shoes could provide real-time and accurate gait phase detection. With the help of visual feedback
from the MGMS, all patients had improvement on their walking paern in the clinical tests. The above
results show the temporal track of the center of ground reaction force (CoGRF) [2].
Recent Key Publications
[1] K. Kong, and M. Tomizuka, “A Gait Monitoring System Based on Air Pressure Sensors Embedded in a Shoe,”
IEEE/ASME Transactions on Mechatronics, vol. 14, no. 3, pp. 359-370, 2009
[2] J. Bae, K. Kong, N. Byl and M. Tomizuka, “A Mobile Gait Monitoring System for Abnormal Gait Diagnosis and
Rehabilitation: A Pilot Study for Parkinson Disease Patients,” ASME Journal of Biomechanical Engineering, vol. 133,
no.4, pp. 041005, 2011
Development of Wireless Joint Angle Sensor
Motivation and Approach
In the NMAS, human motion capture plays an important role in kinematic analysis, and human joint
kinematics is of great interest for abnormal walking detection. A 9-DOF inertial measurement unit (IMU)
sensor was employed and programmed with an Arduino microprocessor based on direct cosine matrix
(DCM) algorithm [1] and a time-varying complementary lter (TVCF) [2]. ZigBee technology was utilized
to enable wireless communication between IMU sensor
node and the local computer. A user interface was
developed to provide visual feedback to patients [1].
Main Results
Three prototyped sensor nodes have been
manufactured and they have been used for both
upper-extremity and lower-extremity human motion
capture and analysis. The wireless IMU sensor could
provide accurate three-dimensional human joint angle
estimation in real-time. The sensor could be congured
to work at either wireless mode (up to 30Hz via ZigBee) [1]
or wired mode (100Hz via serial port) [2] for dierent
applications.
Right gure: experimental results for human motion capture
Recent Key Publications
[1] J. Bae, K. Haninger, D. Wai, X. Garcia and M. Tomizuka, “A
Network-Based Monitoring System for Rehabilitation,” in
Proceedings of IEEE/ASME International Conference on Advanced
Intelligent Mechatronics (AIM), pp. 232-237, 2012.
[2] K. Kanjanapas, Y. Wang, W. Zhang, L. Whiingham, and M.
Tomizuka, “A Human Motion Capture System based on Inertial
Sensing and A Complementary Filter,” in Proceedings of the Sixth
ASME Dynamic Systems and Control Conference (DSCC), 2013.
Passive Exoskeleton Design for Human Motion Analysis
Motivation and Approach
In this research, a 7-DOF passive exoskeleton is designed to combine kinematic sensing and human joint
torque estimation. The designed passive exoskeleton mainly allows motions in the sagial plane. Several
motion sensors and force sensors are utilized including encoders, gyroscopes, and smart shoes; therefore,
the joint kinematics and ground contact forces can be measured. We also developed a dynamic model of
human walking for estimating the human joint torque. Since the kinematic constraints of the lower-limb
extremity during walking vary upon gait phases, the walking dynamic model is described by multiple
sub-dynamic models derived using Lagrangian mechanics.
Main Results
The joint kinematics measurement and torque estimation were veried by experiments. A healthy male
subject with a normal gait paern wore the exoskeleton suit and walked on a treadmill with a constant
speed. The proposed passive exoskeleton could measure
joint kinematics and estimate joint torque accurately as
shown in the gure on the right.
Recent Key Publications
[1] K. Kanjanapas and M. Tomizuka, “7 Degrees of Freedom Passive Exoskeleton for Human Gait Analysis: Human Joint
Motion Sensing and Torque Estimation During Walking,” in Proceedings of IFAC Symposium on Mechatronic Systems,
pp. 285-292, 2013.
Design and Control of a Compact Rotary Series Elastic Actuator (cRSEA)
Motivation and Approach
In the NMAS, an actuator is essential for providing active assistance to users to facilitate their walking.
Precise and large torque generation, back drivability, low output impedance, and compactness of hardware
are important requirements for human assistive robots. Considering the requirements above, a compact
rotary elastic actuator (cRSEA) was designed for knee joint assistance. To magnify the torque generated by
an electric motor in the limited space of the compact device, a worm gear was utilized. There are backlash,
friction, unmodelled dynamics, and disturbance from human-robot interactions in the control system of
cRSEA, which makes the controller design challenging. A robust control technique was proposed for the
cRSEA.
Main Results
With the worm gear mechanism, the cRSEA may generate assistive torque up to 10.86 Nm under normal
situations and 130Nm under extreme situations for a short duration while achieving backdrivability. A PID
control algorithm was combined with a disturbance observer (DOB) and torque feedforward control to
provide robust and accurate torque control of the actuator [1]. Moreover, a ctitious gain method was
proposed to calculate the desired assistive torque for the actuator to generate [1, 2]. The gures below show
the controller structure and the frequency response of the torque error output, respectively.
Recent Key Publications
[1] K. Kong, J. Bae and M. Tomizuka, “A Compact Rotary Series Elastic Actuator for Human Assistive Systems,”
IEEE/ASME Transactions on Mechatronics, vol. 17, no. 2, pp. 288-297, 2012
[2] K. Kong and M. Tomizuka, “Control of exoskeletons inspired by ctitious gain in human model,” IEEE/ASME
Transactions on Mechatronics, vol. 14, no. 6, pp. 689–698, 2009
Control of the cRSEA over Wireless Network
Motivation and Approach
In the NMAS, the cRSEA is controlled over a wireless network for improved mobility. However, wireless
Robotics | Human Mechatronics | Precision Motion Control | Hard Disk Drives |
Vehicle Control | Others
6
Intelligent Control of Robot Manipulators

剩余49页未读,继续阅读
187 浏览量
143 浏览量
点击了解资源详情
308 浏览量
145 浏览量
2009-08-12 上传
2021-05-15 上传
143 浏览量
点击了解资源详情

scalerred
- 粉丝: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- DeepFreeze密码移除工具6.x版本使用教程
- MQ2烟雾传感器无线报警器项目解析
- Android实现消息推送技术:WebSocket的运用解析
- 利用jQuery插件自定义制作酷似Flash的广告横幅通栏
- 自定义滚动时间选择器,轻松转换为Jar包
- Python环境下pyuvs-rt模块的使用与应用
- DLL文件导出函数查看器 - 查看DLL函数名称
- Laravel框架深度解析:开发者的创造力与学习资源
- 实现滚动屏幕背景固定,提升网页高端视觉效果
- 遗传算法解决0-1背包问题
- 必备nagios插件压缩包:实现监控的关键
- Asp.Net2.0 Data Tutorial全集深度解析
- Flutter文本分割插件flutter_break_iterator入门与实践
- GD Spi Flash存储器的详细技术手册
- 深入解析MyBatis PageHelper分页插件的使用与原理
- DELPHI实现斗地主游戏设计及半成品源码分析
