无人机编队通信系统设计:星型与虚拟结构融合
需积分: 0 129 浏览量
更新于2024-08-04
收藏 661KB DOCX 举报
"多机编队1"研究项目着重于设计一种适用于无人机编队飞行的多机通信系统,其核心在于构建一个高效、稳定且抗干扰的通信网络和编队控制机制。首先,课题采用了星型拓扑网络作为自组网络的基础,这种结构适合无人机节点较少、通信范围相对局域化的场景。星型网络的优点包括结构简单、扩展性强和延迟低,但对中心节点性能要求高,易受关键节点故障影响。为了增强网络的鲁棒性,项目还引入了地面基站进行模拟网型拓扑的通信控制,当关键节点出现故障时,能迅速切换到备用节点,确保编队的正常运行。
在编队控制策略上,项目采用了领导跟随者策略作为主体,即设定一个无人机作为编队的领导者,其余无人机作为跟随者。地面基站负责控制领导无人机,领导无人机再通过远端服务器向跟随者发送控制信息,形成单向树型拓扑结构。通过洪泛法进行多跳传输,信息能够有效地覆盖整个编队。然而,为了克服通信路径过长、节点间时延不一致以及关键节点容错性的问题,项目引入了虚拟结构策略,允许从机之间直接通信,同时具备远程基站替代关键节点的能力,提高了通信效率和编队控制的灵活性。
这个项目不仅关注硬件网络的设计,还考虑了软件控制算法的优化,旨在建立一个既能满足无人机编队控制需求,又能有效应对各种网络状况的多机通信系统。通过结合星型网络和虚拟结构策略,项目的整体设计旨在提升无人机编队的协调性和可靠性,为无人机在复杂环境下的协同飞行提供了技术支持。"
1 总体设计
本课题是针对无人机编队飞行所设计的多机通信系统,基于目前的无人机自
组网技术、编队控制方式和网络通信技术,对本课题进行了总体框架设计、程序
设计和通信设计。参考目前无人机编队研发技术,且本项目适用于无人机节点少、
通信范围局域化和抗干扰能力强的场景,故自组网络选择星型拓扑网络;编队控
制方式以领导跟随者策略为主,虚拟结构策略为辅进行多机控制;多机通信方式
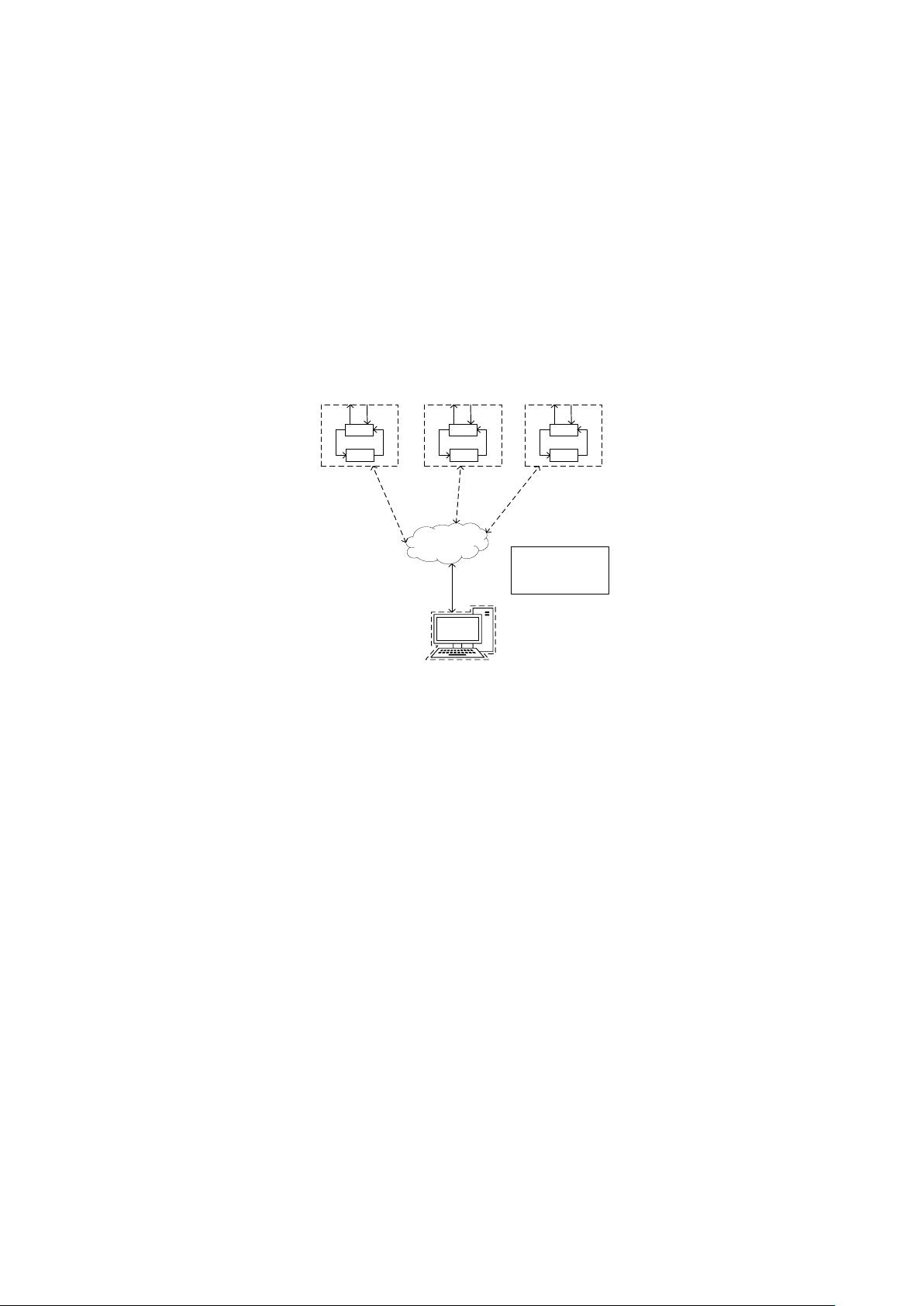
采用集中式控制方法,其系统框架如下图所示。
1
H
1
F
无人机1(主机)
2
H
2
F
无人机2(从机)
N
H
N
F
无人机N(从机)
...
星型自组网
控制器
动力学系统
i
H
i
F
图 1 系统框架
1.1 无人机自组网
无人机自组网以计算机网络结构为基础进行设计,分别有星型拓扑、总线拓
扑、环形拓扑、树型拓扑和混合式拓扑网络等结构。星型结构一般以一个节点为
中心,多个节点为分节点进行布置,具有网络结构简单、可扩展性强、通信延迟
小等特点,由于该网络结构对关键节点性能要求较高,当关键节点出现问题时,
其他从属节点会受到比较大的影响,进而损坏整个网络架构,因此这种网络结构
并不适用节点设备过多的网络需求。相比而言,网型拓扑结构采用分布式结构通
信,节点仅与附近节点通信,对节点要求低,灵活性和抗扰性都比较强,但是设
计和实现较复杂。本课题主要用于少量无人机编队通信,采用一主机,多从机的
通信控制模式,因此在自组网设计方面,以星型结构为主,在基于远端服务器上
的地面基站进行模拟网型拓扑的通信控制方式,这样一来,即使关键节点出现问
题,也让能够及时选择临近的节点作为主节点控制其他从属无人机。
下载后可阅读完整内容,剩余8页未读,立即下载
324 浏览量
1739 浏览量
2024-09-01 上传
114 浏览量
2022-07-14 上传
191 浏览量
191 浏览量

伯特兰·罗卜
- 粉丝: 27
- 资源: 309
 我的内容管理
展开
我的内容管理
展开







最新资源
- 华为内部linux教程
- 微软ASP.NET AJAX框架剖析
- MPEG-4 ISO 标准 ISO/IEC14496-5
- 转贴:随心所欲的Web页面打印技术
- c语言100例.doc
- JSP数据库编程指南.pdf
- 完全精通局域网-局域网速查手册
- ENVI遥感影像处理专题与实践\用户指南与实习指南.pdf
- 软考试卷06下cxys.pdf
- usb设备驱动开发详解-讲座
- 深入浅出Win32多线程程序设计
- 水文控制系统子程序详细的mp430程序
- John.Lions-Lions'.Commentary.on.UNIX.6th.Edition.with.Source.Code.pdf
- PHP和MySQL Web开发 第四版
- ArcGIS Server 9.2 javascript ADF核心 帮助文档
- java 基础及入门
