MATLAB LQR优化实战指南
"这篇文档是关于使用Matlab进行线性二次调节器(LQR)优化的说明,引用了多本经典书籍,强调了随着计算机技术的发展,最优控制理论在多个领域得到广泛应用,尤其是通过数值方法解决最优控制问题的实用性。"
在Matlab中,线性二次调节器(LQR)是一个强大的工具,用于设计控制器以最小化系统的性能指标,通常是能量消耗或系统误差。LQR问题起源于20世纪50年代,由Richard Bellman的动态规划理论发展而来,它提供了一种解析解来解决线性系统的最优控制问题。
首先,LQR的基本概念涉及一个线性系统模型,通常由状态空间方程表示:
\[ \dot{x}(t) = Ax(t) + Bu(t) \]
其中,\( x(t) \)是系统的状态向量,\( A \)是状态矩阵,\( B \)是输入矩阵,\( u(t) \)是控制输入。LQR的目标是找到一个控制输入序列\( u(t) \),使得在给定时间区间内,系统状态的二次性能指标J最小:
\[ J = \int_{0}^{T} [x^T Q x + u^T R u] dt \]
这里,\( Q \)和\( R \)是对称正定矩阵,分别对应状态和控制输入的权重,\( T \)是终止时间。
在Matlab中,可以使用`lqr()`函数来求解LQR问题。这个函数需要输入状态矩阵A、输入矩阵B以及Q和R矩阵。它会返回一个反馈增益矩阵K,该矩阵定义了控制输入\( u(t) \)与状态\( x(t) \)的关系:
\[ u(t) = -Kx(t) \]
这个反馈控制策略能够保证系统的稳定性,并优化性能指标J。
在实际应用中,LQR可能需要针对实时变化的环境进行调整。为此,可以采用自适应控制或者模型预测控制(MPC)等策略。此外,对于非线性系统,可以通过线性化或者使用滑模控制等方法来近似应用LQR。
文献中提到的早期经典书籍,如[1],不仅阐述了最优控制的理论基础,还提供了许多实例,包括时间最优、燃料最优和LQR问题的解析解。而[2]则更侧重于工程应用,介绍了一些迭代算法来数值求解问题。最近的[3]利用Matlab的强大功能,使得解决这些问题变得更加便捷。
Matlab LQR优化是现代控制理论的重要组成部分,它结合了理论与实践,为各种控制系统的设计提供了有力的工具。通过学习和应用这些方法,工程师和研究人员可以在航空、能源、机器人等多个领域实现高效且优化的控制策略。
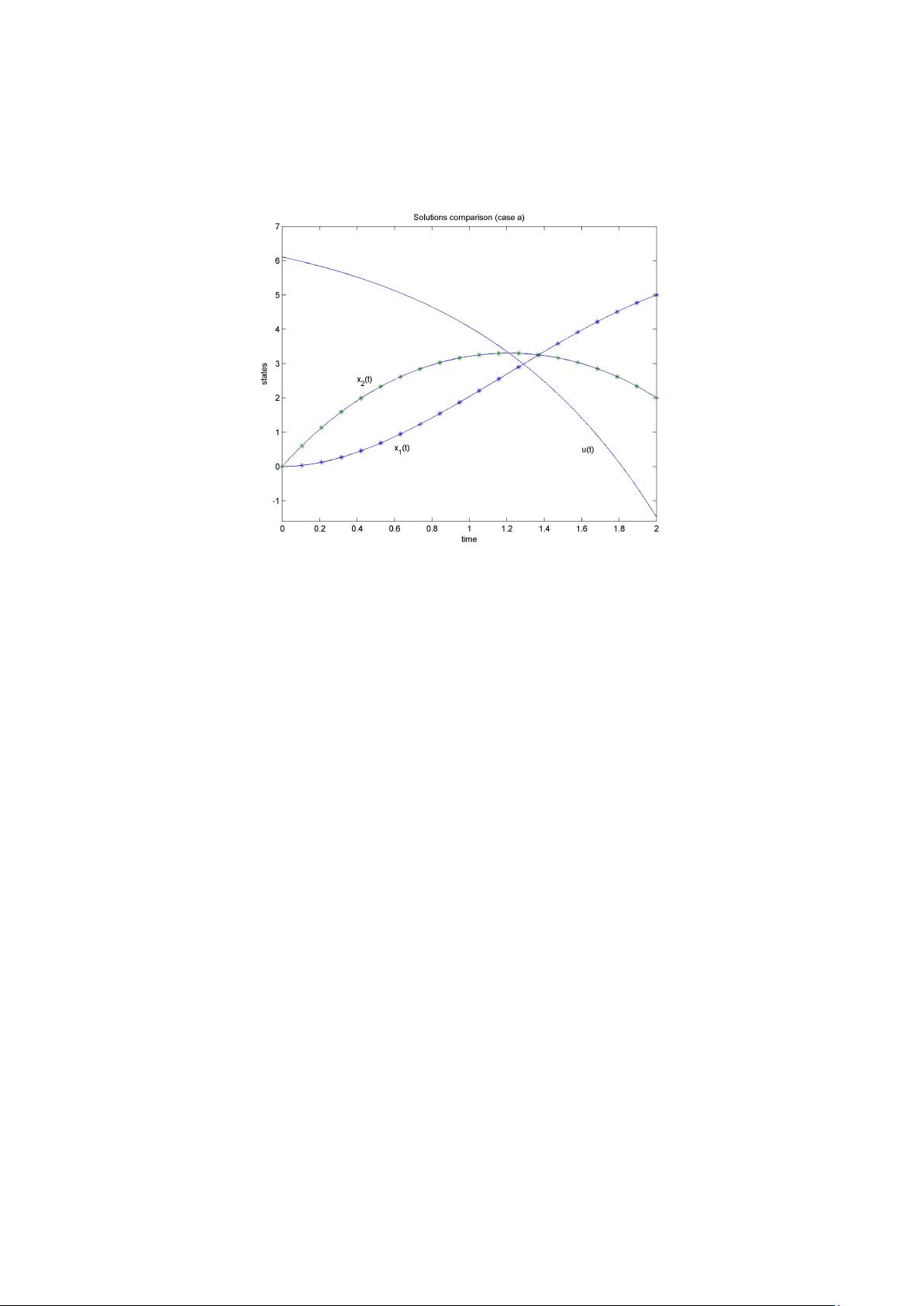
Figure 1: Trajectories for Example 1 (a)
For case (b), we substitute t
0
= 0, t
f
= 2 in the the general solution
to get a set of 4 algebraic equations with 4 arbitrary coefficients. Then
the four boundary conditions are supplied to determine these coefficients.
sol_b is a structure consists of four coefficients returned by solve. We get
the final symbolic solution to the ODE’s by substituting these coefficients
into the general solution. Figure 2 shows the results of both solutions from
MATLAB and [2].
It should be noted that we cannot get the solution by directly supplying
the boundary conditions with dsolve as we did in case (a). Because the
latter two boundary conditions: p
∗
1
(2) = x
∗
1
(t) − 5, p
∗
2
(2) = x
∗
2
(t) − 2 replaces
costates p
1
, p
2
with states x
1
, x
2
in the ODE’s which resulted in more ODE’s
than variables.
% case b: (a) x1(0)=x2(0)=0; p1(2) = x1(2) - 5; p2(2) = x2(2) -2;
eq1b = char(subs(sol_h.x1,’t’,0));
eq2b = char(subs(sol_h.x2,’t’,0));
eq3b = strcat(char(subs(sol_h.p1,’t’,2)),...
’=’,char(subs(sol_h.x1,’t’,2)),’-5’);
eq4b = strcat(char(subs(sol_h.p2,’t’,2)),...
’=’,char(subs(sol_h.x2,’t’,2)),’-2’);
sol_b = solve(eq1b,eq2b,eq3b,eq4b);
5
剩余20页未读,继续阅读
点击了解资源详情
411 浏览量
658 浏览量
257 浏览量
585 浏览量
132 浏览量

jimlonely
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Linux平台PSO服务器管理工具集:简化安装与维护
- Swift仿百度加载动画组件BaiduLoading
- 传智播客C#十三季完整教程下载揭秘
- 深入解析Inter汇编架构及其基本原理
- PHP实现QQ群聊天发言数统计工具 v1.0
- 实用AVR驱动集:IIC、红外与无线模块
- 基于ASP.NET C#的学生学籍管理系统设计与开发
- BEdita Manager:官方BEdita4 API网络后台管理应用入门指南
- 一天掌握MySQL学习笔记及实操练习
- Sybase数据库安装全程图解教程
- Service与Activity通信机制及MyBinder类实现
- Vue级联选择器数据源:全国省市区json文件
- Swift实现自定义Reveal动画播放器效果
- 仿53KF在线客服系统源码发布-多用户版及SQL版
- 利用Android手机实现远程监视系统
- Vue集成UEditor实现双向数据绑定
