PSoC 4实现无传感器BLDC电机控制技术解析
149 浏览量
更新于2024-09-02
收藏 259KB PDF 举报
"这篇文章主要探讨了基于PSoC 4平台实现无传感器BLDC电机控制的方法,强调了无传感器控制在解决成本和可靠性问题上的重要性,并介绍了几种转子位置检测技术,包括反电动势过零点检测法。"
在无刷直流电机(BLDC)的控制中,传统的方法依赖于转子位置传感器来确保励磁与转子位置的同步,以实现高效运转。然而,这种传感器的存在会增加系统成本,降低整体可靠性,特别是在某些特殊环境(如水下)中难以安装。因此,无传感器BLDC控制技术成为了研究的重点。
PSoC 4是一种高度集成的微控制器单元,特别适合于实现复杂的嵌入式系统设计,包括无传感器的BLDC控制。通过利用PSoC 4的灵活性和内置功能,可以构建一个无需外部位置传感器的控制系统,以检测电机的实时状态并执行精确的换相操作。
无传感器控制方案的核心在于转子位置的准确检测。文章提到了几种常见的检测方法,如:
1. 反电动势过零点检测法:这是最常用的技术之一,它利用电机在不同相位时未通电绕组上产生的反电动势来推断转子位置。当电机旋转时,反电动势会在每个通电周期的特定点达到零点,这些零点可以作为确定转子位置的标志。
2. 反电动势三次谐波积分检测法:这种方法利用BLDC电机反电动势中的三次谐波成分来推算转子位置,因为三次谐波与转子位置有直接关系。
3. 续流二极管检测法:通过分析续流二极管的电流变化,可以推断出电机的运行状态,从而确定转子位置。
4. 磁链估计法:通过对电机磁链的连续估计,可以间接确定转子的位置,通常涉及复杂的算法和数学模型。
反电动势过零点检测法因其简单易行和通用性,被广泛应用于各种BLDC电机。在PSoC 4平台上,可以通过编程实现精确的定时器和比较器功能,实时捕捉反电动势的过零点,从而确定电机的换相时刻。
总结来说,基于PSoC 4的无传感器BLDC控制技术通过创新的软件算法和硬件设计,实现了无需额外传感器的电机控制,降低了成本,提高了系统的可靠性和适应性。这种方法对于消费电子和工业应用领域的BLDC电机设计有着重要的实际价值。
基于基于PSoC 4的无传感器的无传感器BLDC控制控制
导读: 无刷直流电机(BLDC) 用电控装置取代了电刷和换向器,提高了电机的可靠性,并且具有体积小、效
率高、噪音低等优点,在消费及工业应用中得到广泛应用。在BLDC控制中,励磁必须与转子位置同步,因此常
用一个或多个转子位置传感器确定电机转子相对于电机定子的位置。
1. 引言引言
无刷直流电机(BLDC) 用电控装置取代了电刷和换向器,提高了电机的可靠性,并且具有体积小、效率高、噪音低等优点,
在消费及工业应用中得到广泛应用。在BLDC控制中,励磁必须与转子位置同步,因此常用一个或多个转子位置传感器确定电
机转子相对于电机定子的位置。采用位置传感器的BLDC控制方案较为简单,根据位置传感器的输出确定转子所处的区间,并
相应的对电机绕组进行换相。然而,位置传感器的使用会带来一些缺点,如增加系统成本,降低可靠性;同时在一些特殊场
合,如在电机处在浸没的环境中,则无法安装传感器。这就要求电机无位置传感器运行。
2. 无传感器控制方案无传感器控制方案
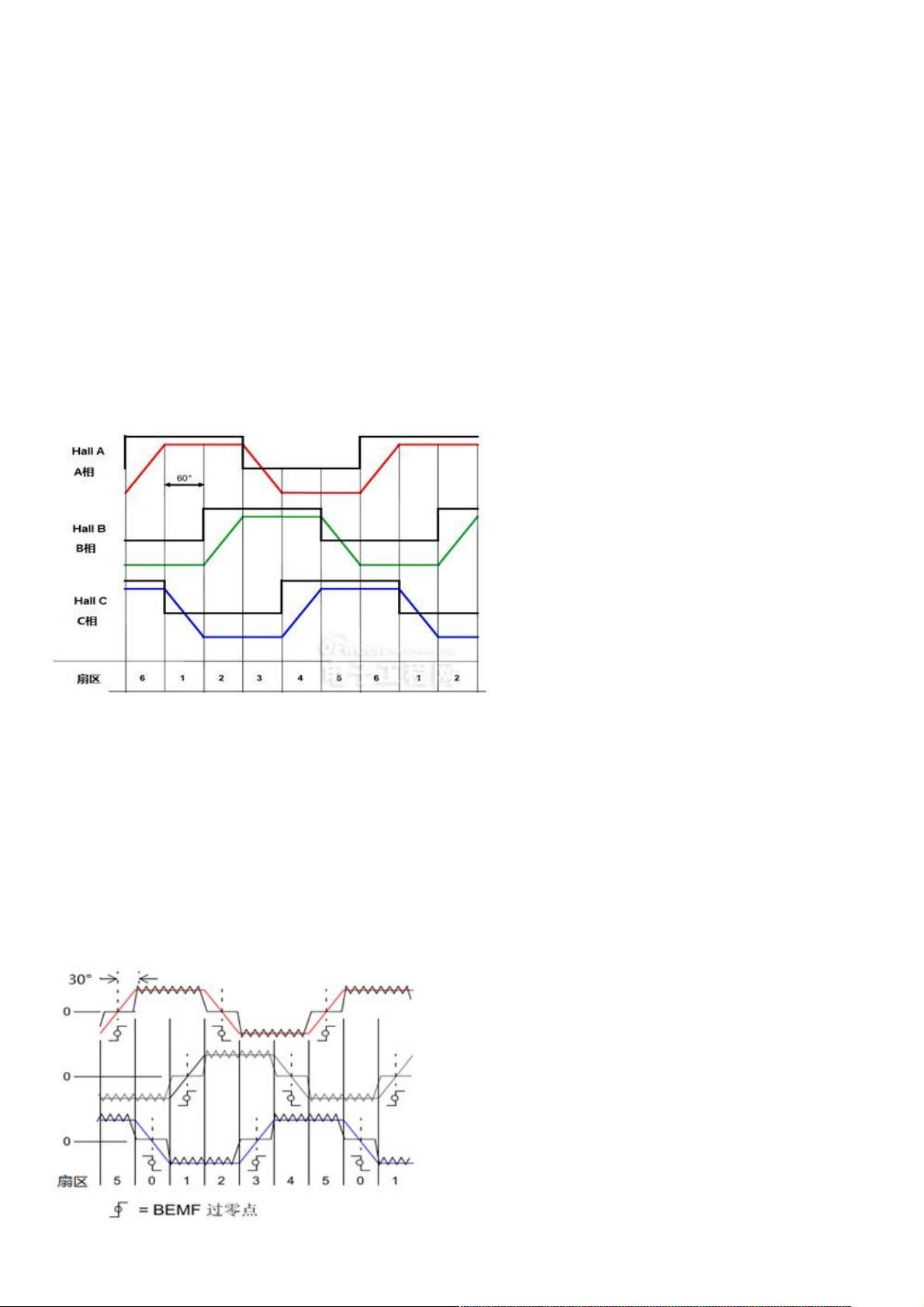
图1即为带霍尔传感器的BLDC换相图。方案采用常规的120°通电方式(六步换相), 为使电机运行,必须按照周期性间隔切
换通电的相(即换相)。对于常规通电,每个电周期需要六次等距换相。每一步或每一区间,相当于60个电角度。六个区间
组成了360 个电角度或一次电气旋转。每一区间上都有两个绕组通电,一个绕组未通电。要使电机正确换相,必须测量电周期
中的绝对位置。采用三个霍尔传感器即可提供六次换相所需要的位置信息。
图1 BLDC换相图
在无传感器控制方案中,必须采用其他方式获取转子位置。转子位置的获得是BLDC无位置传感器控制中的关键技术。常见的
转子位置检测有反电动势过零点检测法、反电动势三次谐波积分检测法、续流二极管检测法、磁链估计法等。其中最常用最经
典的是反电动势过零点检测法。反电动势过零点检测法不需要详细了解电机特性,可适用于多种电机。
在六步换相过程中,每一区间上都有两个绕组通电,一个绕组未通电。这样在未通电绕组上会出现某相上电流为零,在电机引
线上仍可看到电压的现象。这个电压就是反电动势。简单的说,反电动势(EMF)是永磁式电机转子转动时,由定子绕组所
产生的电压。反电动势的幅值与电机转速成正比。在图1中,第1扇区中C相电压,第2扇区中的B相电压即为定子绕组产生的
反电动势。
假设电机由±UV 电压驱动,则反电动势信号以0V为中心对称。如果反电动势信号为一条直线,那么信号将在该区间的一半处
(也就是该区间的30°电角度处)通过零线。该点称为过零点。在过零事件后再经过30°电角度进行下一次换相。因此,精确检
测过零点时刻便可估算转子位置,使电机绕组在正确的时间进行换相。如图2所示。
图2 BEMF过零点与换相图
下载后可阅读完整内容,剩余4页未读,立即下载
110 浏览量
125 浏览量
141 浏览量
2020-08-01 上传
119 浏览量
123 浏览量
123 浏览量
点击了解资源详情
142 浏览量

weixin_38739950
- 粉丝: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
