区域匹配法在立体视觉中的深度映射研究
需积分: 23 54 浏览量
更新于2024-09-08
收藏 418KB PDF 举报
"该资源主要涵盖了基于区域的立体匹配算法在获取彩色图像深度图中的应用。作者Barış Baykant Alagöz在2008年发表的文章中探讨了如何通过区域匹配方法从两幅彩色立体图像对中提取深度信息。文章提出了一种消除不可靠视差估计的滤波器,以提高视差图的可靠性,并展示了算法的结果和比较。立体视觉是实现自主系统和机器人应用中获取场景深度信息的方法之一,其关键在于深度图的可靠性和算法的计算效率。"
本文的核心知识点包括:
1. **立体匹配算法**:立体匹配是计算机视觉领域的一个重要课题,它通过比较立体图像对中的对应像素来计算视差,进而推断出场景的深度信息。在本研究中,作者关注的是基于区域的匹配方法,这种方法考虑了像素邻域内的信息,可以提高匹配的准确性和稳定性。
2. **区域匹配**:与单个像素匹配相比,区域匹配考虑了更大范围的上下文信息,有助于解决单像素级别的光照变化、纹理重复等问题。它通常涉及对图像区域进行分割、相似性度量和成本聚合等步骤。
3. **深度图**:深度图是表示场景中每个像素距离相机深度的二维图像,它是通过计算视差并转换得到的。深度图在机器人导航、自动驾驶、3D重建等领域具有广泛应用。
4. **不可靠视差估计滤波器**:为了提高视差图的可靠性,作者提出了一个滤波器,它可以识别并消除可能的错误匹配,这可能是通过设置一定的阈值或利用先验信息来实现的,从而减少了噪声和不连续性。
5. **计算效率**:对于实时应用来说,算法的计算复杂度是一个关键因素。作者可能讨论了如何优化算法,以在保证精度的同时降低计算需求。
6. **比较分析**:文章中提到了算法结果的展示和比较,这表明作者可能对比了不同区域匹配算法的性能,包括精度、速度和鲁棒性等方面。
7. **参考文献**:文中提到的[1-3]代表了在立体匹配领域的一些相关研究,这些文献可以作为进一步学习和理解该主题的基础。
8. **MATLAB实现**:资源中包含了名为"StereoRegion.rar"的文件,这可能是一个MATLAB实现的立体匹配算法代码库,供读者复现研究结果或进行自己的实验。
9. **可视化结果**:"1.jpg" 和 "3Dview.jpg" 可能是算法处理后的结果展示,包括原始图像、匹配后的视差图以及可能的3D重建视图,这些图片有助于直观理解算法的效果。
这篇论文深入探讨了基于区域的立体匹配算法,特别是其在提高深度图质量和实时应用中的优化策略,是理解和改进立体匹配算法的重要参考资料。
OncuBilim Algorithm And Systems Labs. Vol.08, Art.No:04,(2008)
3
growing region for a root point corresponding to predefined rule.(Region Growing
process) Our rule for associating a point to root point in the growing process is to have
lower error energy than a predetermined threshold of error energy
(LineGrowingThreshold). In our application, being associated to a root points means to
have the same disparity by root point. Thereby, the region emerged from all associated
points has a disparity value. Actually, we should call the algorithm as disparity growing.
Lets generally express steps of the algorithm in a list,
Step 1: (Root Selection process) Select a point, which isn’t belonging to any grown
region and find its disparity using energy function equation (1). Set it root point and set
its disparity to region disparity then go to step 2. If you didn’t find any disparity with
lower enough error energy, repeat this step for the next point.
Step 2: (Region Growing process) Calculates error energy of neighbor points just for
root point disparity, which was called region disparity. If it is lower than the
predetermined error energy threshold, associate this point to region. Otherwise, left it
free.
Step 3: Proceed the Step 2 until region growing any more. In the case that region
growing is completed, turn back to step 1 to find out new root point to repeat these
steps. When all points in image processed, stop the algorithm. Grown disparity regions
composes disparity map ),( jid .
In order to reduce complexity of the algorithm, we allow the region growing in
the direction of rows since disparity of stereo image is only in row directions. So, only
one neighbor, which is the point after searched point is inspected for region growing.
(See Figure 2) We called this type of algorithm as line growing. Lets revise the
algorithm steps for line growing,
Step 1: (Root Selection process) Search on the rows to find a root point, which isn’t
belonging to any grown region and then find its disparity using energy function by line
type window. If the error energy of selected point is equal or lower than
LineGrowingThreshold (
LG
V ), select it as root point and go to step 2. If not, marked the
point idle and do Step1 for following point in the row.
Step 2: (Region Growing process) Calculate error energy of next neighbor point by root
point disparity. If it is equal or lower than the predetermined error energy threshold
LG
V , associate this point to region. Otherwise, back to step 1 to find a new root point.
Step 3: Proceed the Step 1 and Step 2 row by row until reaching end point of image.
Grown disparity regions compose of the disparity map ),( jid .
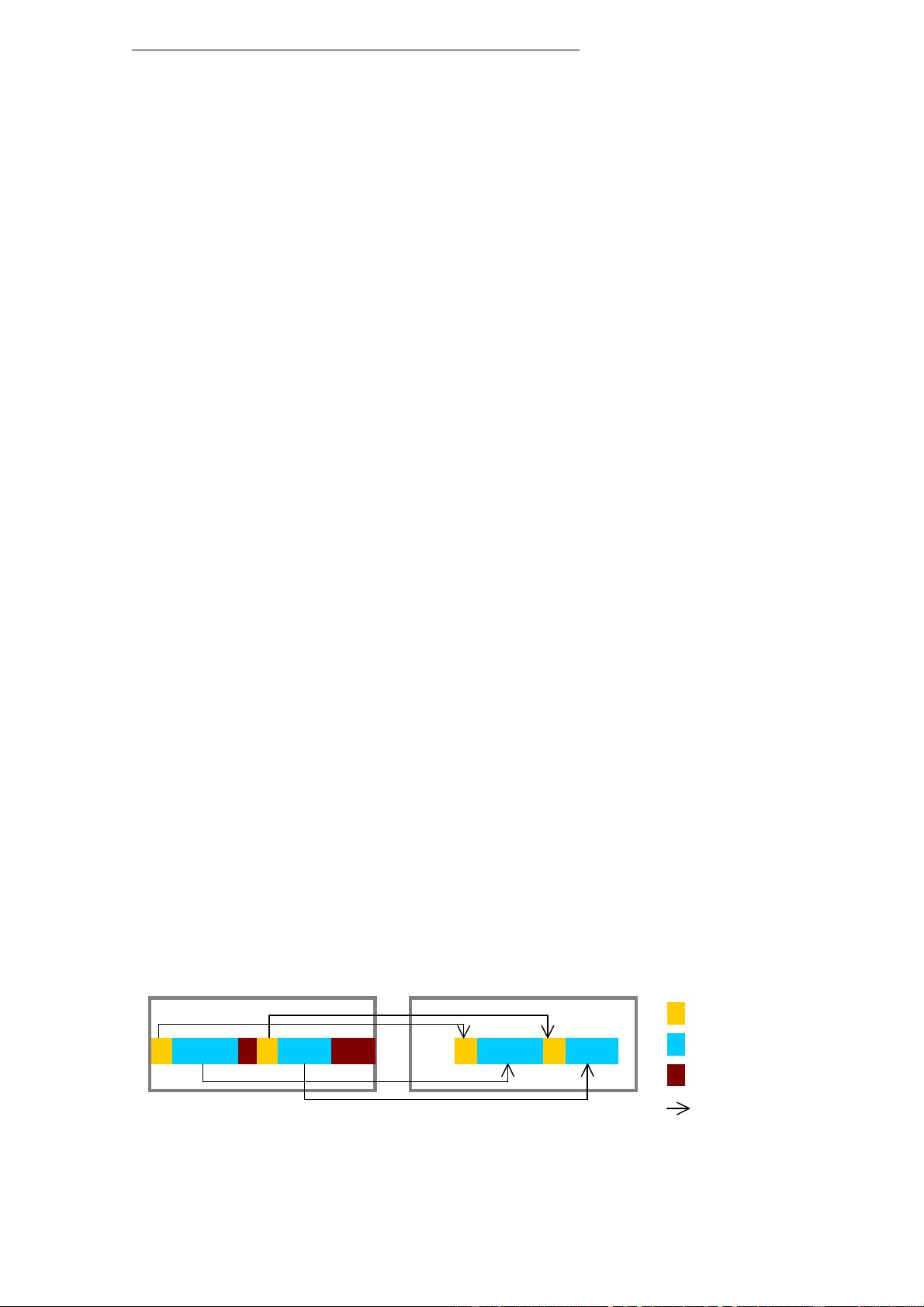
Figure 2. Method using line growing
Left image (L)
Right image (R)
Root Point
Region Point
Idle Point
Matcher
剩余12页未读,继续阅读
2019-08-13 上传
2022-05-22 上传
3394 浏览量
1462 浏览量
847 浏览量
806 浏览量
905 浏览量
2303 浏览量

weixin_39840650
- 粉丝: 411
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
