无位置传感器无刷直流电机启动策略与过零点误差分析
114 浏览量
更新于2024-08-29
1
收藏 326KB PDF 举报
"无位置传感器无刷直流电机控制关键问题研究(二)"
无位置传感器无刷直流电机(BLDCM)在启动时面临的主要挑战是反电动势(BEMF)信号弱,使得准确判断过零点变得困难,进而影响换相时机。在电机启动阶段,由于转速低,BEMF的幅值极小,导致过零检测的精度降低,这直接影响到电机的稳定启动。为了解决这一问题,研究者提出了一系列的启动策略。
一种常见的启动方法是特定位置开环启动法,这种方法要求电机在已知的初始位置开始,通过检测特定的电气角度进行换相。然而,这种方法的缺点是依赖于精确的初始位置,如果电机在任意位置启动,则需要更复杂的控制策略。
另一种方法是任意位置开环启动法,它允许电机在任意位置启动,但需要更复杂的算法来确定初始换相时刻。这种方法通常涉及对电机动态特性的理解和计算,以确保即使在低速下也能正确换相。
"三段式"启动法是一种综合预定位和斜坡升速驱动的策略,将启动过程划分为三个阶段:转子预定位、外同步和自同步。首先,转子预定位阶段通过导通电机的一相定子绕组,使转子趋向于一个确定的位置。有两种可能的情况:一是定子合成磁势与转子磁势形成非180°的角度,二是形成180°的角度。第一种情况中,转子自然会旋转到与定子磁势对齐的位置;而在第二种情况下,转子会通过扰动找到稳定平衡点。
转子预定位完成后,电机进入外同步阶段,此时电机在开环状态下加速,换相时间根据电机的调节特性曲线和计算结果进行调整。当转子速度达到额定速度的大约10%-15%时,BEMF信号足够强,可以进行闭环控制,电机进入自同步阶段,此时转子位置由BEMF检测,启动过程顺利完成。
过零点相移误差的分析是关键,因为任何相移都可能导致换相错误,引起电机运行不稳定甚至损坏。因此,在切换到闭环控制时,必须确保外同步信号和BEMF信号的相位基本同步,以减少切换时的振荡。
无位置传感器无刷直流电机的启动控制涉及到对电机物理特性的深刻理解,包括BEMF信号的形成、转子位置的估算以及启动过程中的动态行为。通过采用创新的启动策略和精确的控制算法,可以克服低速启动时的挑战,实现平稳可靠的电机运行。
无位置传感器无刷直流电机控制关键问题研究(二)无位置传感器无刷直流电机控制关键问题研究(二)
4.电机启动及过零点相移误差分析 前面分析了电机换相点获取的原理,很显然,电机反电势信号的幅值与
转子转速成正比,在启动阶段,电机转速很慢,反电势幅值非常小,过零点鉴别困难,难以决定电机换相时
刻,为电机启动带来困难.为解决无位置传感器无刷直流电机启动问题,科技工作者提出了多种启动方式,主要
有特定位置开环启动法,任意位置开环启动法等. “三段式”启动法结合了预定位方式和斜坡升速驱动方式,
将电机启动过程分为转子预定位,外同步,自同步三个阶段.启动过程平稳可靠. 在转子预定位阶段,先导通
电机任意一相定子绕组,这分两种情况,一种是定子合成磁势与转子磁势F成非180°角度,一种是定子合成
4.电机启动及过零点相移误差分析
前面分析了电机换相点获取的原理,很显然,电机反电势信号的幅值与转子转速成正比,在启动阶段,电机转速很慢,反
电势幅值非常小,过零点鉴别困难,难以决定电机换相时刻,为电机启动带来困难.为解决无位置传感器无刷直流电机启动问
题,科技工作者提出了多种启动方式,主要有特定位置开环启动法,任意位置开环启动法等.
“三段式”启动法结合了预定位方式和斜坡升速驱动方式,将电机启动过程分为转子预定位,外同步,自同步三个阶段.启动
过程平稳可靠.
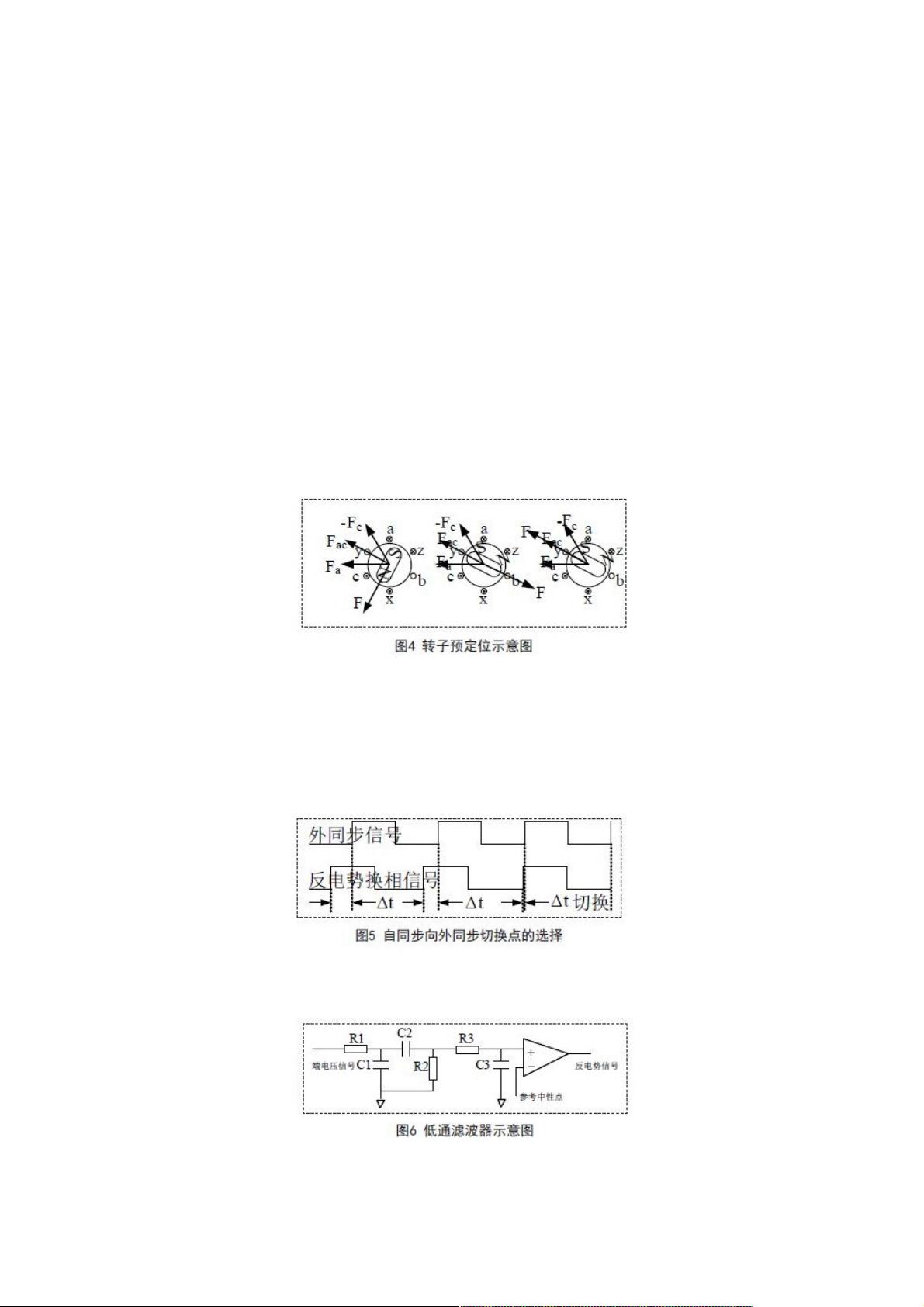
在转子预定位阶段,先导通电机任意一相定子绕组,这分两种情况,一种是定子合成磁势与转子磁势F成非180°角度,一
种是定子合成磁势与转子磁势F成180°角度.种情况下,转子必然转到其磁势与定子合成磁势重合的位置,如图4中的第三幅.第
二种情况下,电子转子处在非稳态平衡点,任何扰动都会破坏掉这种平衡,使电机转子转到稳定平衡点.
两种情况和终稳定情况如图4所示(假定预定位导通的是A.C两相).
当转子预定位成功后,三段式进入外同步阶段.此阶段转子位置难以辨明,电机处在开环加速状态,此时应结合电机调节
特性曲线和分析计算的结果,对换相时间合理安排,逐步加速.具体计算方法在资料中有详细介绍,此处不赘述.
一般情况下当转子转速达到额定转速的10%-15%左右时,反电势就会达到比较理想的地步,此时电机进入闭环状态,转
子位置由反电势测得,即进入自同步阶段,电机启动完成.值得注意的是,切换点要选择在外同步信号与反电势信号相位基本
同步的时刻,以减小电机切换震荡,如图5所示.
在第三节中,分析了相移误差的,假设低通滤波电路如图6所示.
则应该补偿的相位误差为:
下载后可阅读完整内容,剩余3页未读,立即下载
213 浏览量
268 浏览量
513 浏览量
522 浏览量
241 浏览量
199 浏览量
点击了解资源详情
111 浏览量
110 浏览量

weixin_38526650
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入解析ASP.NET底层架构:Web请求的流转与处理
- UML中文版:Java程序员指南
- Jboss EJB3.0 实战教程:从入门到精通
- 提升IE技巧:智能ABC与加密文件实用操作
- Windows CE.NET入门教程:配置与调试
- C++编程提升技巧:专家Scott Meyers作品精华解读
- 林锐博士的《高质量C++/C编程指南》要点解析
- Eclipse实战指南:Java开发者入门宝典
- VxWorks文件压缩与硬盘加载优化
- JSP数据库开发全攻略:Oracle集成与实战指南
- JBuilder9中构建Struts应用实战教程
- VxWorks下BSD4.4规范网络程序设计详解
- Struts框架详解:构建高效Web应用
- Velocity模板引擎:Java中的强大工具
- 智能奥秘:无机生命体的创建与智能原理探索
- C++在嵌入式系统中的关键技术与应用深度探讨
