GD32 MCU驱动的激光雷达转接板硬件设计
需积分: 12 86 浏览量
更新于2024-08-05
收藏 615KB DOCX 举报
本文主要介绍了基于GD32的电路设计,特别是针对激光雷达转接板的硬件设计方案。设计中涉及到了电源管理、MCU选择、接口电路、设备功率统计以及PCB布局等多个方面。
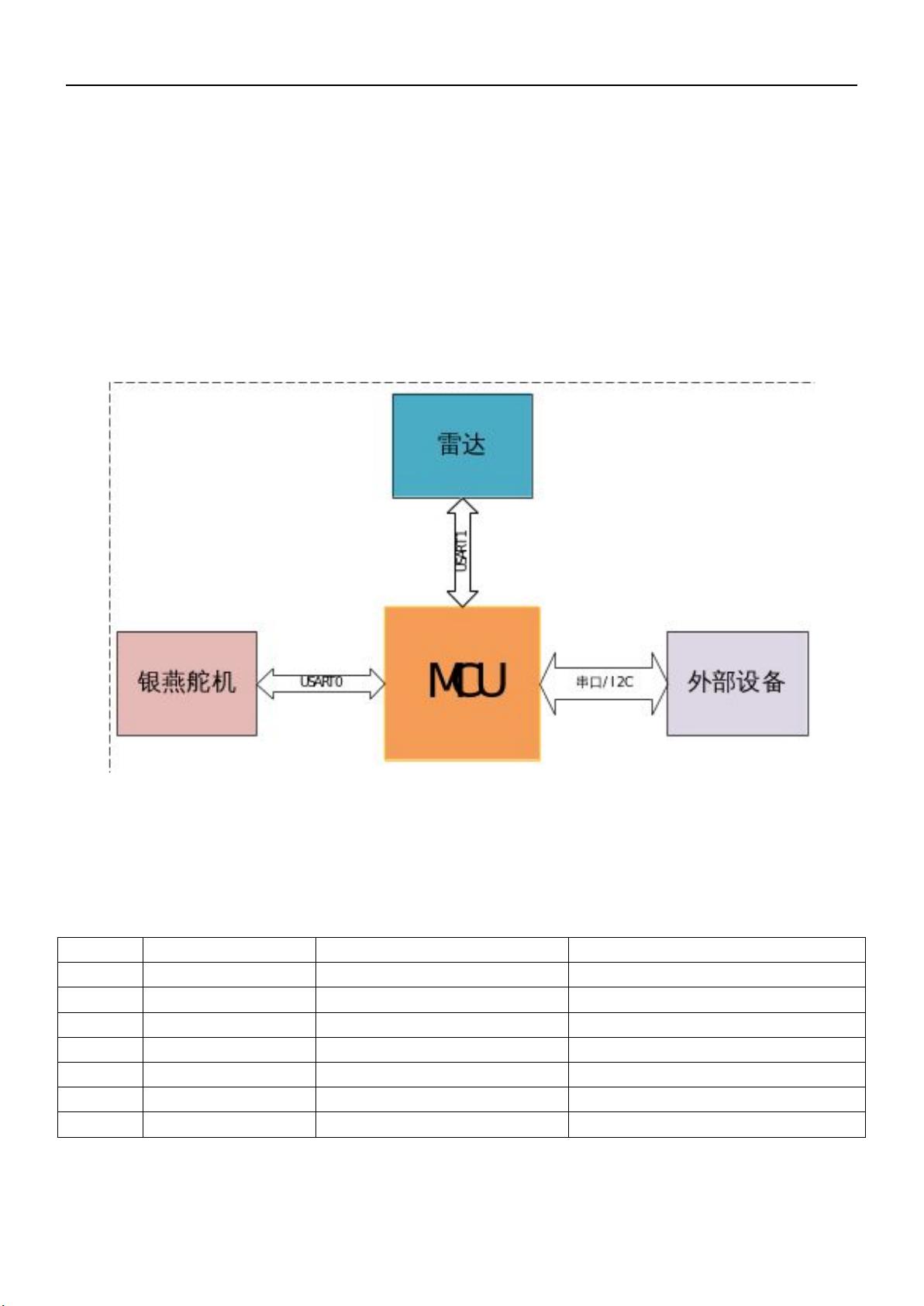
在系统概述中,激光雷达转接板采用50.5V直流输入,经过Boost升压电路提升至5.5V,供给雷达设备和银燕舵机使用。设计考虑了EMC要求,符合Class B标准,并规定了工作温度范围为-20℃到+60℃。系统的核心控制器是GD32C103CBT6单片机,基于ARM Cortex-M4架构,具有128KB的Flash内存和32KB的RAM,最高运行频率可达120MHz。该MCU配备有3个USART,其中USART2兼备RS485和I2C通信功能。
电路模块设计部分,电源模块选择了TI的TPS5450DDAR电源芯片,能够处理5.5V至36V的输入电压,最大输出电流为5A,满足24V转3V、最大3A负载的需求。为了减小电源纹波,该选择留有一定的余量。R1设置为10K欧姆,通过公式计算得出R2应为6.86K欧姆,实际选择6.8K欧姆电阻以实现所需的输出电压。
在接口电路部分,列举了各个接口的IO名称和连接设备,包括用于舵机的USART0,雷达的USART1,外部设备的USART2,状态指示灯的LED,JLink编程接口,预留的I2C接口以及模式选择接口。每个接口都有明确的IO引脚分配。
设备功率统计表列出了不同负载的功率需求,如银燕舵机在堵转时的电流大约在1.6A至1.9A之间,TF02-Pro-W雷达的功率为2W,以及MCU和其他设备的3.3V和3V3电源需求。
在PCB布局方面,提供了四个层的设计:TOP、GND、PWR和BOT,以及3D的顶部和底部视图,确保了电气性能和物理布局的合理性。
总结来说,这个基于GD32的电路设计涵盖了电源管理、MCU应用、接口设计和功率预算等多个关键点,为激光雷达转接板提供了一个稳定、高效的解决方案。
II. 系统概述
1、总体方案
方案主控 MCU 采用 Giga Device(兆易创新)SGD32C103CBT6 芯片,该芯片基于 ARM
Cortex-M4 架构、32Bit,片上 FLASH 128KB,RAM 32KB,最高主频 120MHz。共有 3 个
USART (USARTO, USART1 和 USART2),其中 USART2 兼容 RS485 与 I2C 通信。
图 2 电路方案框图
表 1.MCU 接口定义表
序号 接口名称 IO 名称 接口设备
1 Usart0
PA9、PA10 银燕舵机
2 Usart1
PA2、PA3 雷达
3 Usart2
PB10、PB11 外部设备
4
LED 灯
PB12
状态指示灯
5 JLink
PA13、PA14 烧录接口
7
I2C 预留 PB6、PB7 I2C 预留
8
模式选择 PB15、PC13、PB14 模式选择
第 3 页 共 11 页
剩余10页未读,继续阅读
1857 浏览量
2021-07-12 上传
375 浏览量
2024-07-07 上传
425 浏览量
2021-09-12 上传
149 浏览量
228 浏览量
437 浏览量

ly_fish_sky
- 粉丝: 16
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- html5实现经典打砖块游戏源码下载
- 超厉害的象棋开局库obk文件
- 行业文档-设计装置-一种平压压痕切线机的夹纸机构.zip
- initializr-gradle-start
- html案例作品优品购项目.zip
- awesome-actionscript:精选的ActionScript框架,库和软件的清单
- flask_credential_manager:允许用户管理其凭据
- 行业文档-设计装置-一种具有储物功能的电脑主机箱.zip
- yyfx.rar_4 3 2 1_C语法制导翻译_三地址_实验3递归下降_语法制导翻译
- java_learn_ST:https:github.comSmallSparklelearn_java_ST
- spring-boot-postgress-example-master:带有Postgress的SpringBoot示例
- js实现年会现场幸运观众抽奖系统源码下载
- core_ordering:订购机器人
- 慕云游项目静态开发.zip
- 行业文档-设计装置-陶瓷基复合材料砂轮结构.zip
- Rust中基于DEFLATE的流式压缩/解压缩库。-Rust开发
