DEAP智能材料上的自适应模糊滑模控制算法:减小滞后与不确定性
21 浏览量
更新于2024-08-29
收藏 771KB PDF 举报
本文主要探讨了基于新型智能材料——电介质电活性聚合物(Dielectric Electro-Active Polymer, DEAP)的自适应模糊滑模控制(Adaptive Fuzzy Sliding Mode Control)在柔性机器人领域中的应用。DEAP因其轻质、高能量密度和大变形等特点,使其在仿生机器人驱动器中具有广阔的应用前景。然而,DEAP材料通常存在明显的滞后效应以及非线性和不确定性,这些特性对于控制器的设计提出了挑战。
作者首先针对DEAP柔性驱动器的滞后特性,引入了Prandtl-Ishlinskii模型的逆补偿操作,这种方法旨在减少系统中的滞后影响,提高控制精度。Prandtl-Ishlinskii模型是一种非线性行为建模方法,通过它,研究者能够更好地理解和补偿DEAP材料的动态行为,确保系统的稳定性和响应速度。
接着,文中提出了一种鲁棒的自适应模糊滑模控制器设计。模糊滑模控制结合了模糊逻辑的灵活性和滑模控制的鲁棒性,能够在面对DEAP材料的不确定性和非线性时提供有效的控制策略。模糊系统能够处理复杂的输入输出关系,而滑模控制则能够保证系统快速地接近并保持在预定的滑模表面,从而实现对DEAP驱动器的精确控制。
该算法的核心在于通过在线学习和自适应调整,控制器能够动态地适应DEAP材料参数的变化,进一步降低系统误差,并增强对扰动的抵抗能力。通过将模糊逻辑与滑模理论相结合,控制器能够在一定程度上抑制DEAP的内在不稳定性,提高整个系统的性能和可靠性。
总结来说,这篇研究论文针对DEAP柔性驱动器的特性,提出了一种创新的控制策略,旨在克服其滞后、非线性和不确定性问题,从而提升仿生机器人驱动系统的整体效能。这对于推动DEAP在实际应用中的发展,特别是提高其在复杂环境下的自主运动控制能力具有重要意义。
Rev. Téc. Ing. Univ. Zulia. Vol. 39, Nº 3, 255 - 268, 2016
257
The rest of the chapter is arranged as follows: Section 2 introduces the electric driven principles of the
DEAP smart material, the experiment platform and the dynamic model of the DEAP actuator. Section 3
introduces the establishment of the PI hysteresis model and then an integrator is cascaded with the compensated
system to eliminate the hysteresis operator through inverse compensation. In Section 4, firstly a sliding mode
controller is designed for the DEAP actuator. Then, in view of the uncertainty of the PI hysteresis operator, a
fuzzy logic system is applied to approximate the equivalent controller. Finally a direct adaptive fuzzy sliding
mode controller is designed. The simulation results, the control performances of adaptive fuzzy sliding mode
control strategy in the DEAP actuator system, are provided in Section 5. The final conclusion is shown in
Section 6.
2. DEAP ACTUATOR
In this paper, the push actuator is produced by the DEAP material, which is a class of the smart material
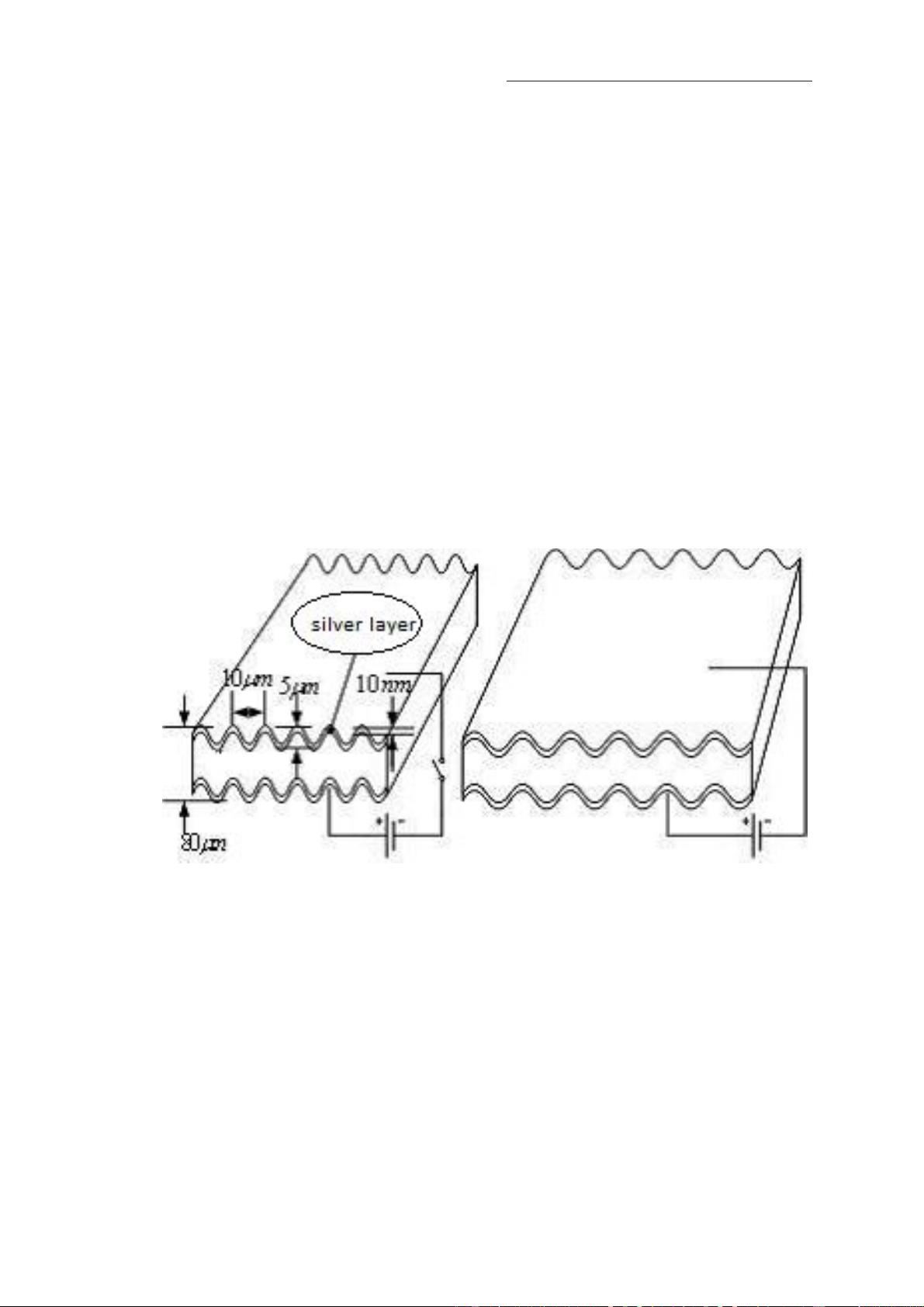
and produced by Danfoss Polymer A/S with a better performance. The DEAP smart material is a kind of thin-
film polymer, which is composed of silicone resin and the surface silver layer. The silver layer is an undulating
shape, as shown in Fig. 2. The amplitude and wavelength of the wave is 5μm and 10μm, respectively. The film
thickness is 80μm, and the thickness of the silver layer is 100nm (Sarban and Jones, 2010). The DEAP is a kind
of lightweight flexible material, which will produce strain in the surrounding when two ends of the silver layer
electrode have a certain electric potential difference. The direction of the wave is mainly the elongated direction
of the film, and the elongation rate of vertical direction is relatively small, which can be neglected (Sarban and
Jones, 2010). The DEAP actuator can produce a relatively greater driving force than the other EAP actuators,
which is generally up to about 10N force, as shown in Figure 2.
(a) (b)
Figure 2. The deformation principle of the DEAP material
(a) outage (b) energizing
The experimental platform can be shown as Figure 3. Because the DEAP is a smart flexible material, it is
necessary to provide a certain pretension.The DEAP actuator is vertically hung in order to use the own gravity
of actuator clip to produce the pretension. The sensor LVDT of measuring actuator displacement and the high-
voltage power S15-3P of supplying driving force are connected with the DEAP actuator. The data acquisition
card PCI-1710 can realize data interaction between MATLAB and the DEAP actuator, and achieve input and
output of data through analog in and analog out module of MATLAB Simulink. Using the analog in module
transmits the displacement signal acquired from LVDT to the MATLAB Simulink. Using the analog out module
transmits the control signal to the high-voltage power to drive the DEAP actuator.
剩余13页未读,继续阅读
2011-03-08 上传
2021-02-21 上传
2021-02-10 上传
2021-02-20 上传
2021-02-10 上传
2022-07-15 上传
2021-02-10 上传
2011-03-08 上传

weixin_38706747
- 粉丝: 5
- 资源: 962
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
