随机频SAR成像:压缩感知新突破
112 浏览量
更新于2024-08-30
收藏 804KB PDF 举报
"这篇研究论文探讨了一种基于压缩感知的随机频SAR成像方法,旨在解决传统步进频率波形在合成孔径雷达(SAR)应用中的限制,如成像时间过长和可用成像范围狭窄的问题。"
正文:
在遥感和地球科学领域,合成孔径雷达(SAR)技术已经成为获取地表信息的重要手段。SAR系统通过发射一系列脉冲信号并接收回波来创建高分辨率的图像。传统的步进频率波形因其硬件需求低和分辨率高的特点而被广泛应用,但其缺点是需要较长的信号传输时间,这限制了SAR的实时性能和宽范围成像能力。
本文提出的随机频率SAR成像方案,是基于压缩感知理论的一种创新性尝试。压缩感知理论指出,如果一个信号是稀疏的或者可以通过某种变换表示为稀疏的,那么只需要少量的采样就可以重构该信号。在SAR成像中,如果目标区域内的目标数量相对较少,即目标在某个特定域内是稀疏分布的,那么我们可以通过随机选择的一部分频率来收集数据,而不是传统的完整步进频率序列。
这种方法的优势在于,它能显著减少所需的数据采集量,从而缩短信号传输时间,扩大SAR系统的成像范围。在实际应用中,这意味着SAR系统可以在更短的时间内覆盖更大的地理空间,提高工作效率。此外,由于采用随机频率采样,还能降低对信道稳定性和同步精度的要求,进一步增强了系统的鲁棒性。
然而,实现这一技术需要解决几个关键问题。首先,如何有效地设计随机频率序列以确保重构图像的质量?其次,需要开发高效的算法来处理这些随机采样数据,以恢复出高分辨率的SAR图像。最后,如何在实际系统中集成这种新的采样策略,同时保持系统整体性能的稳定性,也是一个挑战。
基于压缩感知的随机频SAR成像技术为SAR系统提供了一条克服传统步进频率技术局限性的新途径,有望在环境监测、灾害预警、军事侦察等领域发挥重要作用。未来的研究将集中在优化采样策略、提升重构算法效率以及实现实用化系统的设计等方面,以充分挖掘这一技术的潜力。
YANG et al.: RANDOM-FREQUENCY SAR IMAGING BASED ON COMPRESSED SENSING 985
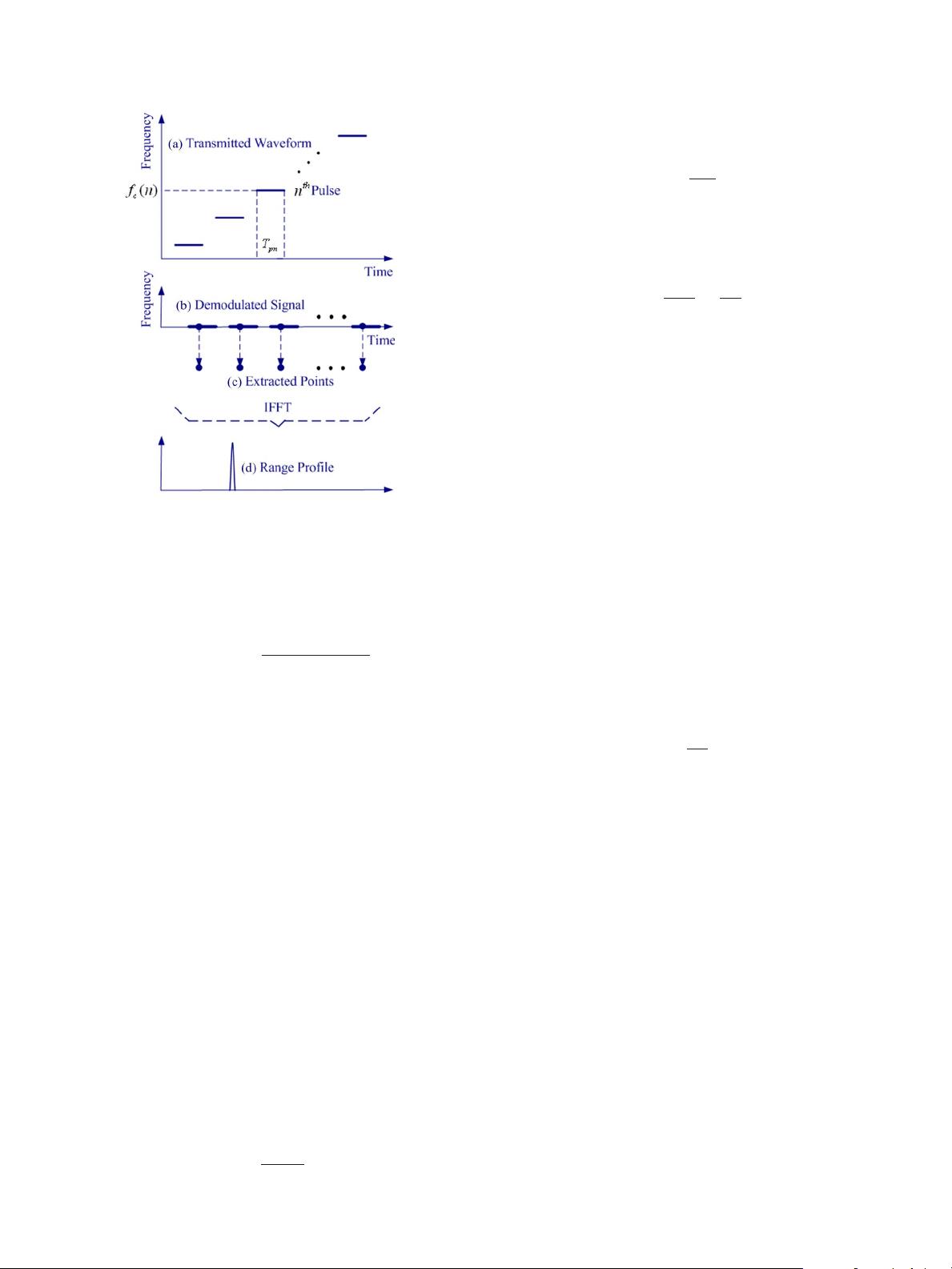
Fig. 1. Processing of stepped-frequency waveform. (a) Transmitted wave-
form. (b) Demodulated signal. (c) Extracted data points. (d) Range profile.
time window of each pulse and perform the IFFT to realize
range compression. The extracted sampling points before the
IFFT are
s(n)=g · exp
−j
4π(f
c
+Δfn)R
c
. (7)
The processing of the stepped-frequency waveform to obtain
the range profile is shown in Fig. 1. In the aforementioned
analysis, we assume that the target is stationary or nearly
stationary in the transmitting time of a sequence of frequencies.
If the target has a significant velocity, this assumption is not
valid. In this case, the target velocity will influence the range
profile [1], [2]. In [1], an algorithm is proposed that exploits
fully polarimetric data in order to improve the target radial
motion compensation. In [4], a compensation method for the
range difference of each frequency is proposed in the case of
SAR imaging. However, in the imaging scheme proposed in
this paper, this problem does not exist, since the sensing matrix
can be designed to match the range of each frequency exactly.
B. Limitations of Stepped-Frequency Waveform
Applied to SAR
We will now analyze the limitations of the stepped-frequency
waveform applied to SAR. The stepped frequency is discrete
in the frequency domain. This results in periodic repetition
in the time domain, and the repetition period is 1/Δf .The
corresponding repetition period for range is c/(2Δf),sothe
nonaliasing range width is limited to
R
w
<
c
(2Δf)
(8)
where R
w
denotes the nonaliasing range width.
For a fixed pulse time interval, to avoid overlapping of the
echoes, the maximum range width is
D
1
=
Δtc
2
(9)
where Δt is the time interval of the pulses. According to (8),
for a given frequency step, the maximum nonaliasing range
width is
D
2
=
c
2Δf
=
Nc
2B
(10)
where B is the signal bandwidth, and
B = NΔf. (11)
Therefore, the maximum available range width is
D =min{D
1
,D
2
}. (12)
In stepped-frequency SAR, the equivalent azimuth sampling
interval is NΔtV , where V is the radar velocity. To avoid
azimuth aliasing, the azimuth resolution will not exceed the
azimuth sampling interval, so that the upper limit of the azimuth
resolution is
r
a
= NΔtV. (13)
It should be noted that (13) is the upper limit of the azimuth
resolution restricted by the stepped-frequency parameters.
The actual azimuth resolution is determined by the synthetic
aperture length.
The range resolution is
r
r
=
c
2B
. (14)
From (8)–(14), we can see that the available imaging range
width and the range resolution and azimuth resolution must be
traded off against each other. To let the available range width
become wider, Δt and N should be bigger, B should be smaller,
but all of these requirements will decrease the resolution in both
the range and azimuth dimensions. The available imaging range
width is usually very narrow, unless the range and azimuth
resolutions are both significantly decreased. For instance, let
B = 512 MHz, N = 1536, V =50m/s, and Δt =3.2552 μs.
From the aforementioned parameters, we can calculate that
D
1
= 488.3 m, D
2
= 450 m, r
a
=0.25 m, and r
r
=0.293 m.
The available range width is only 450 m. If V increases, the
available range width will be reduced. If the platform velocity
V is smaller, the stepped-frequency SAR can obtain a higher
resolution while maintaining a wider range width. This implies
that the stepped-frequency SAR is most suitable for low veloc-
ity platforms.
Most of the aforementioned limitations are based on the
traditional sampling theory and will limit the application of the
stepped-frequency waveform in SAR. In the next section, we
will present a novel imaging scheme based on the CS theory.
The aforementioned limitations can be overcome if the targets
are sparse or compressible, so that the available imaging range
剩余11页未读,继续阅读
2023-03-07 上传
2021-09-11 上传
2021-10-11 上传
2021-03-13 上传
2011-05-08 上传
2021-04-23 上传
2021-03-28 上传
点击了解资源详情
点击了解资源详情

weixin_38628243
- 粉丝: 1
- 资源: 907
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
