智能车辆Frenet坐标下多场景轨迹规划与模型预测控制研究
38 浏览量
更新于2024-06-16
3
收藏 42.25MB PDF 举报
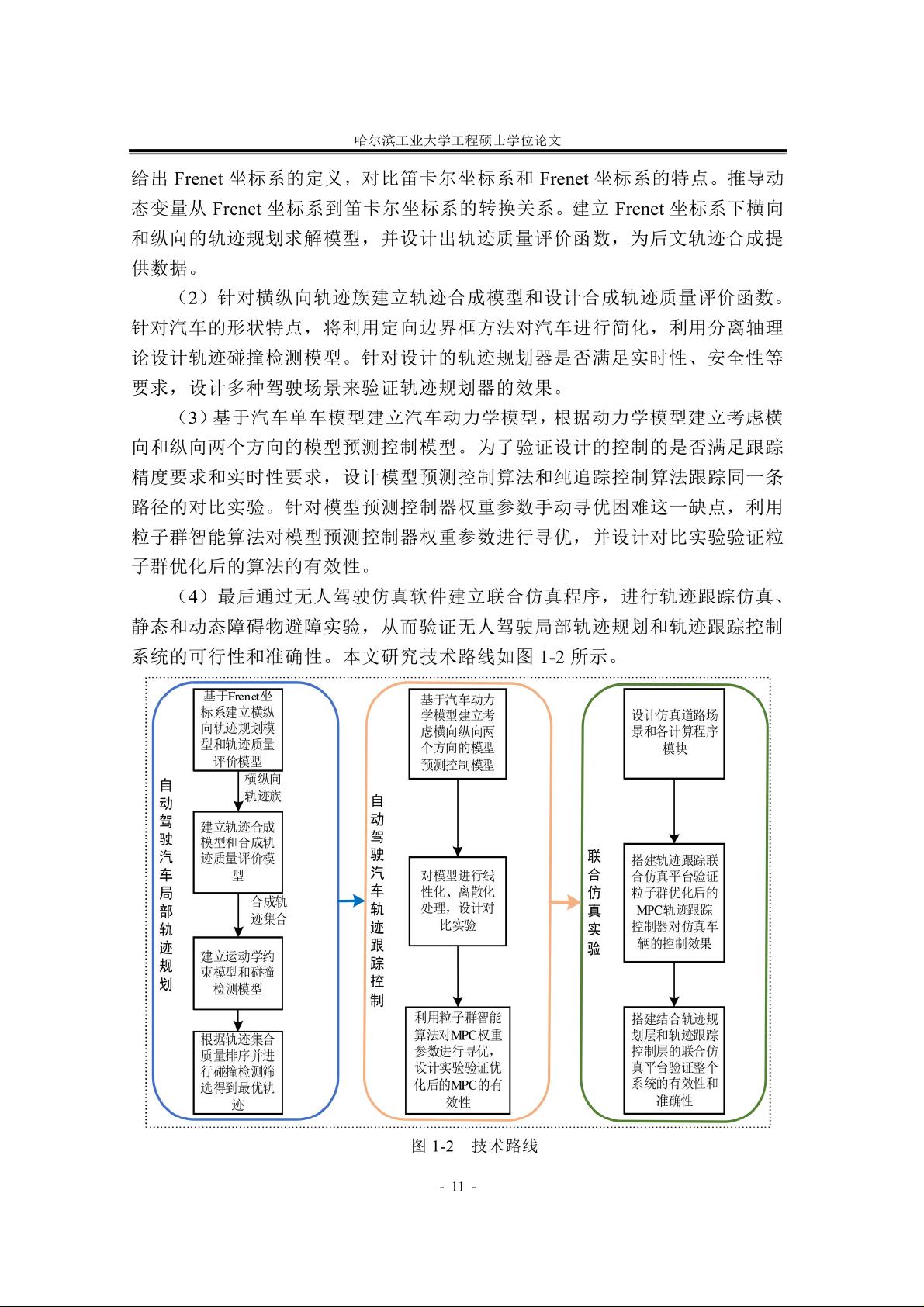
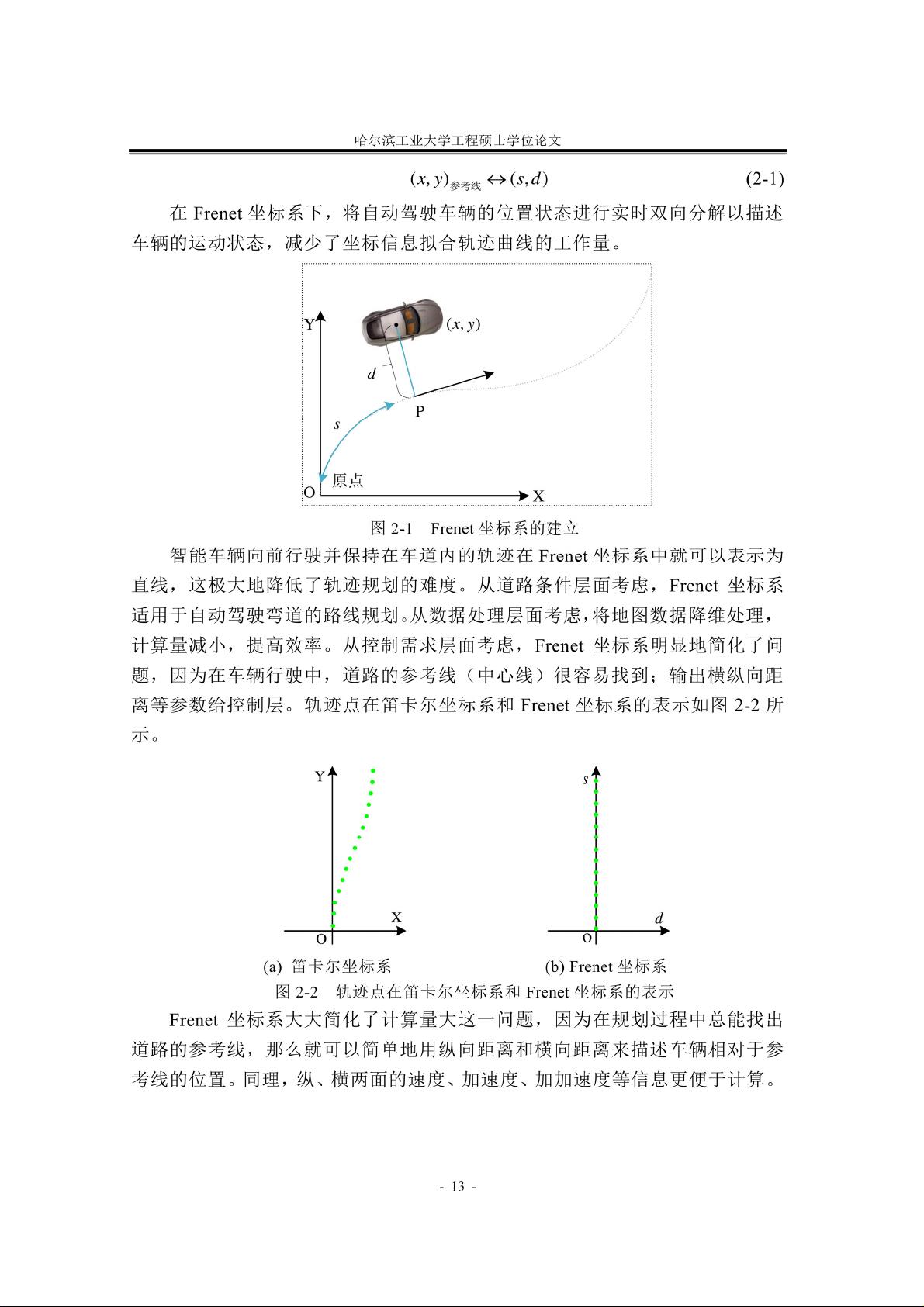
本文主要探讨智能车辆在多场景下的局部轨迹规划与跟踪控制算法,以实现更高效、安全和实时的自动驾驶。首先,研究者引入了Frenet坐标系,这是一个在自动驾驶领域广泛应用的空间坐标系统,它有助于构建精确的横向和纵向轨迹规划模型。针对定速巡航、变道超车和减速停车等常见驾驶场景,设计了特定的终端采样状态,并通过设计质量评价函数,生成了一组横纵向具有评分的采样轨迹族,这有助于评估轨迹的可行性和舒适性。
接着,作者提出了横纵向采样轨迹合成算法,该算法考虑了运动学约束,确保生成的轨迹满足车辆的实际运动性能,如加速度和转向能力。通过定向边界框法简化环境障碍物和车辆几何形状,并采用分离轴理论进行碰撞检测,以保证规划的轨迹在实际环境中不会发生碰撞。
为了提高控制性能,文中构建了基于汽车动力学的模型预测控制器,将路径跟踪和纵向速度跟踪作为关键指标。通过比较模型预测控制器与纯追踪控制器的实验结果,发现前者在跟踪精度上表现更优。进一步地,利用粒子群算法对模型预测控制器的权重参数进行了优化,实验验证了优化后的控制器在跟踪效果上有显著提升。
针对改进后的模型预测控制器,文章进行了双移线工况下的联合仿真实验,结果显示其在跟踪期望轨迹时表现出良好的性能。同时,针对静态和动态障碍物场景,设计了联合决策模块、轨迹规划模块和控制模块的协同实验,验证了本文提出的主动避障系统能实时规划出平滑的局部避障轨迹,并通过模型预测控制器快速而准确地跟踪,从而实现了有效的主动避障。
本文的工作着重于智能车辆在复杂驾驶场景下的局部轨迹规划与跟踪控制,通过Frenet坐标系、运动学约束、碰撞检测以及模型预测控制等关键技术,提升了自动驾驶系统的有效性、安全性和实时性,为智能车辆的自主行驶提供了强有力的支持。关键词包括Frenet坐标系、轨迹规划、模型预测控制和粒子群算法,这些都是智能车辆未来发展的关键技术方向。

点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-08-04 上传
2024-03-02 上传
2021-09-20 上传
2022-04-18 上传
2021-10-10 上传
2021-09-30 上传

电气_空空
- 粉丝: 5141
- 资源: 1334
 我的内容管理
展开
我的内容管理
展开







最新资源
- Wiki-Definition-crx插件
- python官方3.9.0b4-amd64版本exe安装包
- python:Python书籍和课程
- gh-actions:体验GitHub动作
- Auto-Convert CSV to XLSX-crx插件
- pycrumbs:来自互联网的Python的点点滴滴
- Tag-Cloud-in-TipStory-Explore-Page
- 学习:劳兹的学习阶段
- FingerLock:开源密码保护器应用
- cvxpy:针对凸优化问题的Python嵌入式建模语言
- 仿网易新闻XHNewsFramework开发框架
- 聊天js插件layim.js
- nodejs-certification-training:NodeJS应用程序开发人员认证的培训概念
- gotovimvkusno
- 云雀:云雀是Python的解析工具包,专注于人体工程学,性能和模块化
- Reddit-Effect:交互式图表显示加密货币价格与Reddit上该加密货币的帖子数量
