密集RFID阅读器的人工免疫网络防碰撞算法
23 浏览量
更新于2024-08-26
收藏 1.3MB PDF 举报
"基于人工免疫网络的防碰撞密集RFID阅读器算法是针对在大量部署RFID阅读器时出现的读者间碰撞问题的一种解决方案。该文由中山大学信息科学与技术学院的作者提出,旨在通过优化资源配置来最大程度地提高RFID阅读器网络的总体有效询问区域,以解决读者间碰撞问题。"
文章详细介绍了这个基于人工免疫网络的抗碰撞算法,该算法结合了混合编码,适用于物理位置、时间槽、频率通道和发射功率等多种因素的考虑。在提出的AINetHE-RA(人工免疫网络混合编码资源分配)模型中,候选抗体由定位段和一个cha组成,这代表了RFID资源分配的多个方面。
在RFID系统中,由于阅读器的密集部署,读者间碰撞问题成为一个关键挑战。当多个阅读器同时试图读取标签时,它们可能会互相干扰,导致数据丢失或错误。传统的基于调度的方法主要从优化资源分配的角度来缓解这一问题,但这些方法可能无法完全解决物理位置和动态环境变化带来的复杂性。
AINetHE-RA算法借鉴了生物免疫系统的原理,通过模拟抗体与抗原的相互作用来寻找最优的资源配置策略。它采用了非均匀标签分布的概念,考虑到RFID标签在实际场景中分布的不均匀性,以更有效地处理各种碰撞情况。此外,该算法还利用了分段仓库管理的思想,将仓库或部署区域划分为多个部分,每个部分由特定的阅读器负责,以减少冲突。
优化过程通过模拟免疫网络的进化过程来实现,包括克隆选择、抗体多样性保持和抗体突变等步骤。这些步骤有助于搜索空间的全局探索和局部优化,从而找到在当前环境下最优的资源配置方案。
"基于人工免疫网络的防碰撞密集RFID阅读器算法"是一种创新的解决方案,它利用生物启发式方法解决了RFID系统中的读者碰撞问题,提高了系统的效率和可靠性。通过混合编码策略和对环境特性的适应,该算法有望在复杂的RFID网络环境中发挥重要作用。
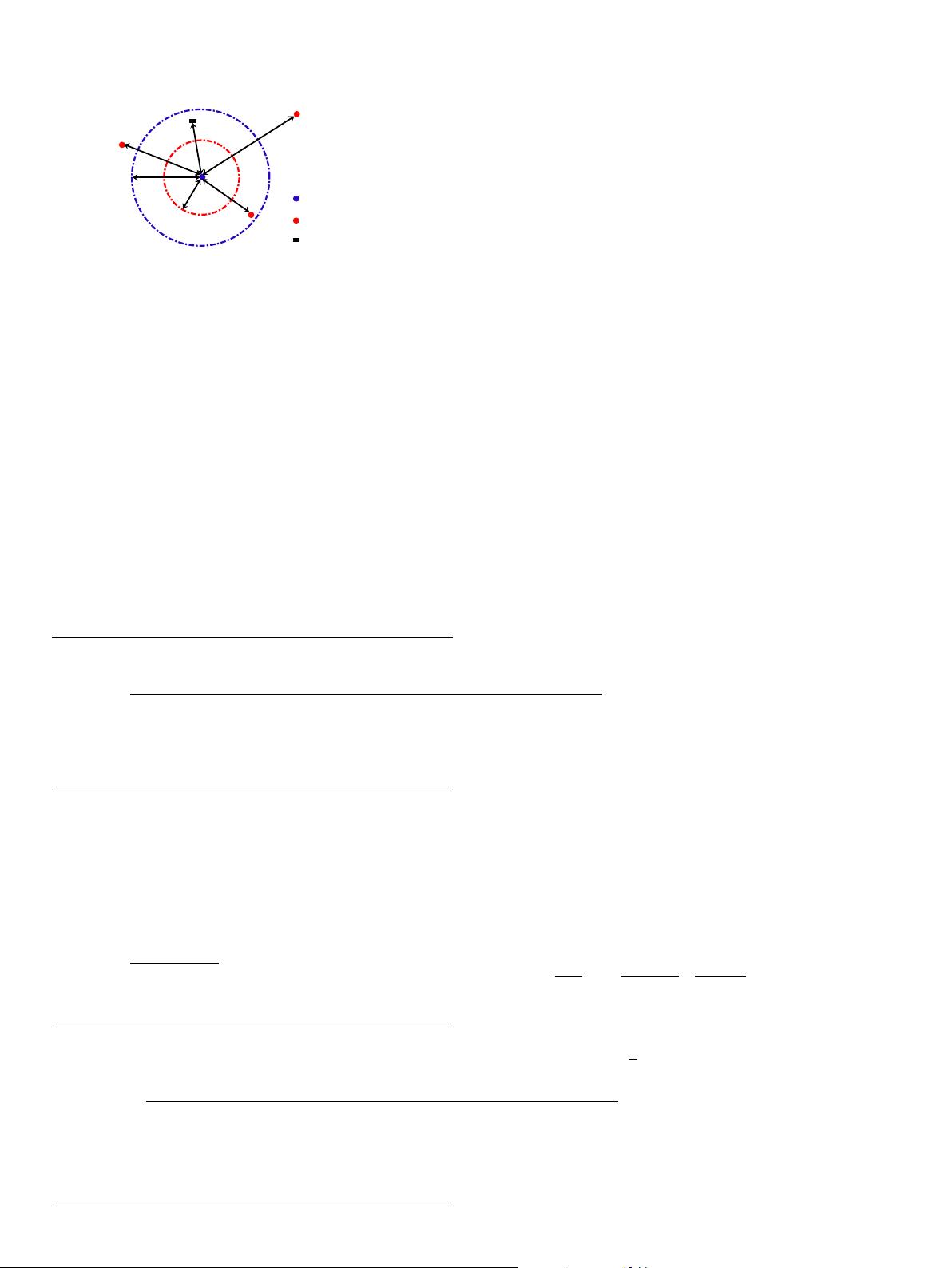
tag identification means that r
max,i
is larger than the distance x be-
tween the desired reader R
i
and the target tag T. On the other hand,
the effective interrogation radius of R
i
decreases to r
i
(marked as a
red dashed-line circle) seriously due to the interferences from the
other N
Reader
1 interfering readers operating at the same time. In
this case, the total interference signal from other readers is so strong
as to make the interrogation radius r
i
smaller than x; hence, R
i
cannot
detect this target tag successfully. Therefore, only those tags satisfy-
ing x 6 r
i
can be identified by the desired reader R
i
.
3. RFID reader-to-reader anti-collision model
For the reader-to-reader collision problem described in Fig. 1,
our research motivation is to firstly establish a comprehensive
scheduling-based model for readers with respect to frequency
channels, time slots, power and physical locations, and then find
an effective computational method to solve this model.
Let’s assume that N
Reader
readers are deployed in the rectangular
working space (WS) with the length of L
1
and the width of L
2
and
(x
i
, y
i
) denotes the location of the ith reader R
i
. There are N
Freq
fre-
quency channels and N
Slot
time slots available for these readers.
Each reader has the maximum transmitting power of P
max
. As far
as this multiple-reader scenario to be concerned, R
i
can communi-
cate with and identify the target tag T at the kth time slot success-
fully only if the signal-to-interference-plus-noise ratio (SINR
i
)ofR
i
is greater than a desired minimum value SINR
min
. That is to say,
SINR
i
(k, x) must satisfy the following formula
SINR
i
ðk; xÞ¼
BP
i
ðk; xÞ
I
i
ðk; xÞþNoise
i
P SINR
min
; ð1Þ
where x is the distance between R
i
and the target tag T, BP
i
(k, x)is
the backscatter signal power received by R
i
, I
i
(k, x) is the total inter-
ference power from the other N
Reader
1 readers operating at the
kth time slot simultaneously and Noise
i
is the noise power of R
i
.In
Physics, BP
i
(k, x) can be defined as
BP
i
ðk; xÞ¼
a
b
x
E
tag
P
i
ðkÞG
T
G
R
ðP
0
x
c
Þ
2
: ð2Þ
where,
a
b
x
is the normalized spectrum power, E
tag
is the effective
power reflection coefficient, P
i
(k) is the signal power of R
i
at the
kth time slot, G
T
and G
R
is the transmitting antenna gain and the
receiving antenna gain, respectively, P
0
is the reference path loss
at the distance of 1 m and
c
is the path-loss exponent. On the other
hand, the total interference power I
i
(k, x) can be determined by
I
i
ðk;xÞ¼
X
N
Reader
j¼1;j–i
x
j
ðkÞI
j;i
ðkÞd
j;i
¼
X
N
Reader
j¼1;j–i
hP
j
ðkÞG
T
G
R
x
j
ðkÞb
mask
ð
D
CH
j:i
ÞP
0
d
c
j;i
;
and
D
CH
j:i
¼jCH
i
ðkÞCH
j
ðkÞj:
ð3Þ
where,
x
j
(k) is a two-valued variable (i.e.,
x
j
(k) = 1 means that R
j
operates at the kth time slot while
x
j
(k) = 0 means no operation),
h is the fading coefficient, P
j
(k) is the signal power of R
j
at the kth
time slot, and b
mask
() is the spectrum-mask level which is a func-
tion of the frequency separation between two readers. Known from
the propagation path of radio signals, the distance d
j,i
between R
i
and R
j
can be measured by Euclidean distance as
d
j;i
¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðx
i
x
j
Þ
2
þðy
i
y
j
Þ
2
q
; s:t: 0 6 x
i
; x
j
6 L
1
; 0 6 y
i
; y
j
6 L
2
:
ð4Þ
By integrating Eqs. (1)–(4), SINR
i
(k, x) can be completely formulated
as
Suppose that r
i
(k) is the effective interrogation radius of R
i
at the kth
time slot, which can be solved by
r
i
ðkÞ¼arg max
x
SINR
i
ðk; xÞ P SINR
min
: ð6Þ
However, the effective interrogation radius of R
i
cannot be greater
than its maximum interrogation radius r
max,i
(k)
r
max;i
ðkÞ¼
k
i
ðkÞ
4
p
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
P
i
ðkÞG
T
G
R
P
min
1 m
4
ð1 þ mÞ
2
s
; ð7Þ
R
i
(x
i
,y
i
)
R
2
(x
2
,y
2
)
R
j
(x
j
,y
j
)
R
1
(x
1
,y
1
)
T
d
j,i
r
max,i
r
i
x
d
2,i
d
1,i
Interfering reader
Desired reader
Target tag
Fig. 1. Reader-to-reader collision problem with multiple readers.
r
i
ðkÞ¼min
a
b
x
E
tag
P
i
ðkÞG
T
G
R
ðP
0
x
c
Þ
2
hG
T
G
R
X
N
Reader
j¼1;j–i
x
j
ðkÞP
j
ðkÞb
mask
ðjCH
i
ðkÞCH
j
ðkÞjÞP
0
ððx
i
x
j
Þ
2
þðy
i
y
j
Þ
2
Þ
c
þ Noise
i
0
B
B
B
B
B
@
1
C
C
C
C
C
A
1
2
c
; r
i: max
ðkÞ
0
B
B
B
B
B
B
@
1
C
C
C
C
C
C
A
;
s:t:
8i 2 NR; 8k 2 NS; CH
i
ðkÞ2CH; P
i
ðkÞ2½0; P
max
; ðx
i
; y
i
Þ; ðx
j
; y
j
Þ2WS; ð8Þ
SINR
i
ðk; xÞ¼
a
b
x
E
tag
P
i
ðkÞG
T
G
R
ðP
0
x
c
Þ
2
hG
T
G
R
X
N
Reader
j¼1;j–i
x
j
ðkÞP
j
ðkÞb
mask
ðjCH
i
ðkÞCH
j
ðkÞjÞP
0
ððx
i
x
j
Þ
2
þðy
i
y
j
Þ
2
Þ
c
þ Noise
i
;
s:t:
8i 2 NR; 8k 2 NS; CH
i
ðkÞ2CH; P
i
ðkÞ2½0; P
max
; 0 6 x
i
; x
j
6 L
1
; 0 6 y
i
; y
j
6 L
2
: ð5Þ
4800 Z. Li et al. / Expert Systems with Applications 41 (2014) 4798–4810
剩余12页未读,继续阅读
2011-09-04 上传
2010-06-15 上传
2022-09-21 上传
2021-03-09 上传
2021-03-30 上传
点击了解资源详情
点击了解资源详情
2021-09-29 上传

weixin_38592758
- 粉丝: 5
- 资源: 924
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索AVL树算法:以Faculdade Senac Porto Alegre实践为例
- 小学语文教学新工具:创新黑板设计解析
- Minecraft服务器管理新插件ServerForms发布
- MATLAB基因网络模型代码实现及开源分享
- 全方位技术项目源码合集:***报名系统
- Phalcon框架实战案例分析
- MATLAB与Python结合实现短期电力负荷预测的DAT300项目解析
- 市场营销教学专用查询装置设计方案
- 随身WiFi高通210 MS8909设备的Root引导文件破解攻略
- 实现服务器端级联:modella与leveldb适配器的应用
- Oracle Linux安装必备依赖包清单与步骤
- Shyer项目:寻找喜欢的聊天伙伴
- MEAN堆栈入门项目: postings-app
- 在线WPS办公功能全接触及应用示例
- 新型带储订盒订书机设计文档
- VB多媒体教学演示系统源代码及技术项目资源大全
