发那科机器人PMC编程指南
需积分: 50 200 浏览量
更新于2024-07-17
7
收藏 3MB PDF 举报
"发那科机器人PMC使用手册20121106,介绍如何使用发那科机器人的PLC功能,涵盖PMC的基本概念、构成、编程与传输方法,以及PNS启动程序设计。"
本文主要介绍了发那科(FANUC)机器人的PMC(Programmable Machine Control)系统,这是一种利用梯形图编程来实现系统监控的解决方案。PMC在FANUC R-J3iC控制器之后的Mate箱体上得以应用,它没有独立的硬件,而是通过软件选项A05B-2500-J760提供的FAPT Ladder功能。
首先,文章介绍了PMC的基本概念,指出PMC是通过执行梯形图程序来控制机器人行为的一种方式。它允许用户替代传统的系统监控方法,以实现更灵活的自动化控制。
在第二章中,详细阐述了PMC的构成。PMC地址由特定的字母标识,表示不同的地址类型,如DI/DO(数字输入/输出)、UI/UO(通用输入/输出)。地址可以是字地址(无小数点)或位地址(带有小数点)。PMC的地址范围是其核心组成部分,理解这些地址对于编写有效的PMC程序至关重要。
PMC程序的构建包括基本指令和功能指令。基本指令涉及逻辑操作,如AND、OR和NOT,而功能指令则提供更复杂的功能,如定时器和计数器。通过程序举例,读者能更好地理解如何结合这些指令来编写PMC程序。
第三章讲解了PMC程序的建立和传输流程。这包括在机器人控制器端口设置,使用FANUCLADDERIII软件创建和编辑程序,以及从MC备份中导入程序。此外,还涵盖了程序的编译、上传、备份和监控,这些都是PMC编程工作中的关键步骤。
第四章重点讨论了PNS(Power-on Sequence,上电启动)程序设计,列举了常用的PMC功能指令,并分析了PNS启动时序。通过实例,展示了如何设计满足特定需求的PMC程序,确保机器人在启动时按照预期顺序执行任务。
发那科机器人PMC使用手册提供了全面的指导,从基础理论到实际操作,帮助用户理解和掌握PMC系统,以便于在自动化生产环境中有效地控制和编程FANUC机器人。这份手册是FANUC机器人用户进行PMC编程的重要参考资料。
佛山隆深机器人有限公司
6
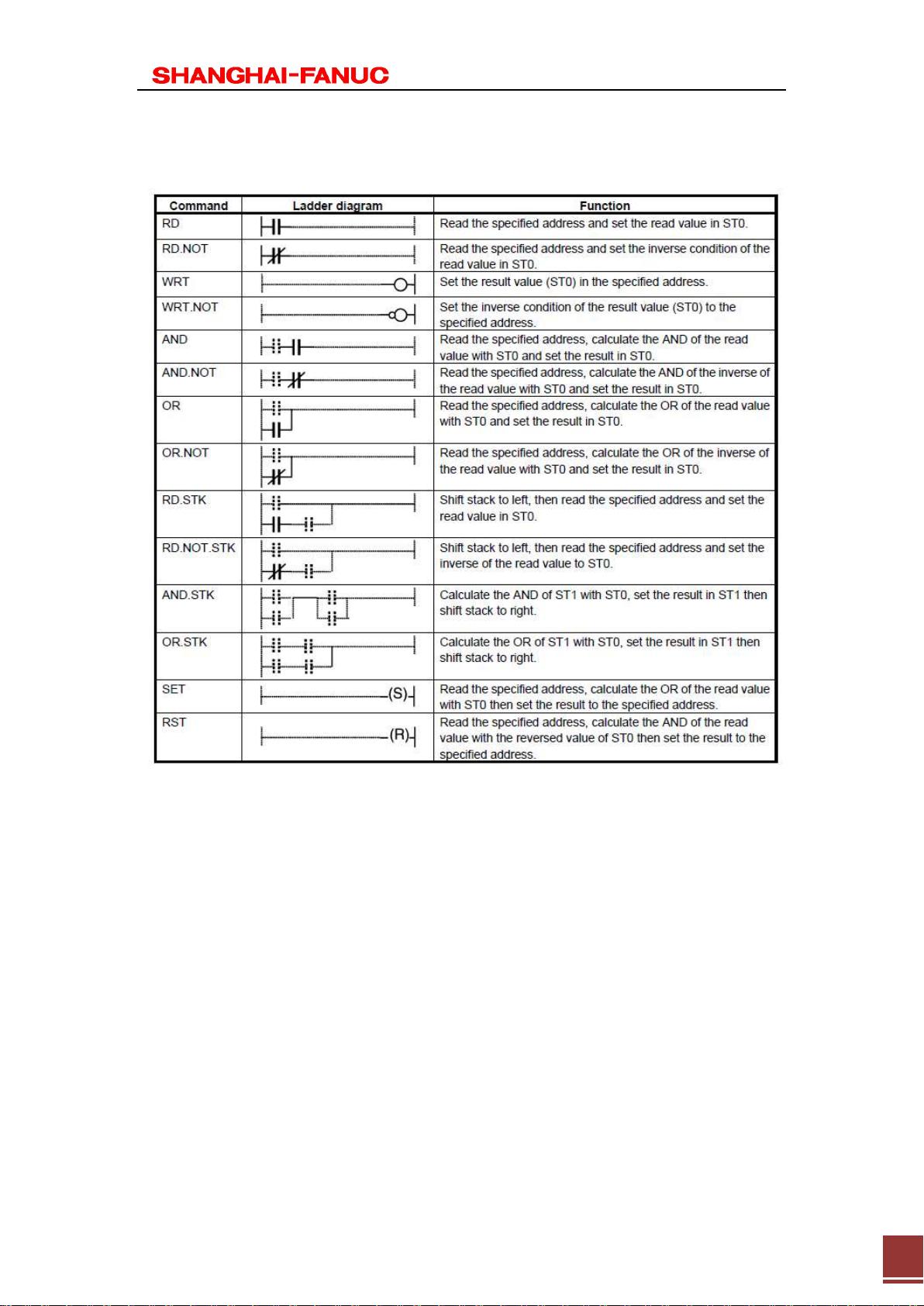
2.3 PMC 基本指令
PMC 基本指令是让 PMC 的地址位进行高速运算的,处理时间非常快。
剩余28页未读,继续阅读
2136 浏览量
278 浏览量
188 浏览量
2488 浏览量
222 浏览量

aoaihaoren8
- 粉丝: 31
- 资源: 22
 我的内容管理
展开
我的内容管理
展开







最新资源
- ID_Assignment2
- 实现可以读取本地通讯录联系人信息功能
- 易语言源码易语言使用驱动打开进程源码.rar
- ExcelFileComparison:用于比较两个 Excel 工作表的 Java 代码。 专为 UNOCHA 文件量身定制
- 超级市场商品陈列检查要点DOC
- PTCustomerManager:体育教练客户经理Android应用
- Live-Drawing
- chinese_nlp:中文自然语言处理学习之路
- javascriptCursos:发生在我附近的影片库,没有任何影片,没有问题,因为在植物群落上没有问题
- java笔试题算法-secure-tomcat-datasourcefactory:标准TomcatDataSourceFactory的替代品
- wp-cli-plugin-active-on-sites:WP-CLI命令,用于列出多站点网络中已激活给定插件的所有站点
- mlbridge.github.io:一个介绍ML Bridge软件套件功能的网站
- 超市选址分析报告
- Mancala-ui
- 微信小程序版本高仿滴滴打车.rar
- PHP DOC-crx插件
