人脸超分辨率新法:局部支持回归(LiSR)
需积分: 5 94 浏览量
更新于2024-07-14
收藏 4.89MB PDF 举报
本文主要探讨了一种新颖的面部图像超分辨率(Face Image Super-Resolution, SR)方法——局部性支持回归(Locality-induced Support Regression, LiSR)。该研究针对低分辨率(Low-Resolution, LR)人脸图像,提出了一种利用局部支持来提升图像细节的高效算法。核心思想是通过学习从局部LR特征到高分辨率(High-Resolution, HR)特征的映射函数,从而预测出HR图像版本。
LiSR的关键在于两个组成部分:一是利用LR图像的局部结构,即从LR图像的局部区域中提取支持;二是引入两种不同的实现方式,即LR patch guided LiSR(LR-LiSR)和HR patch guided LiSR(HR-LiSR)。LR-LiSR直接学习LR和HR局部特征之间的映射关系,而HR-LiSR则依赖于HR图像的局部特征来进行指导,这使得算法能够更好地捕捉图像的纹理和细节。
在实现过程中,研究人员首先从输入的LR图像中提取出小的局部区域(patch),然后通过支持向量回归(Support Vector Regression, SVR)或者更高级的非线性模型来学习这些局部特征之间的关联。这种方法融合了局部性(locality)的概念,因为支持是基于邻域的,确保了在保持局部一致性的同时,增强整体图像的清晰度。
为了获取更好的性能,文章可能还讨论了数据预处理、特征选择、模型训练策略以及可能的优化技术,如使用深度学习的方法来提取更为丰富的特征表示,或者采用正则化手段防止过拟合。此外,论文可能还展示了实验结果,比较了LiSR与其他常见超分辨率方法(如插值法、稀疏编码等)在人脸图像上的性能,证明了其在提升图像质量和保真度方面的优势。
文章的历史表明,这项研究经历了从接收初步稿到修订和最终接受的整个过程,最终在2014年2月24日在线发布。关键词包括:超分辨率、人脸图像、支持回归、流形学习等,这些都是论文的核心关注点。
这篇研究论文为面部图像超分辨率问题提供了一个创新的解决方案,它不仅考虑了局部信息的保留,还通过两种引导方式优化了特征映射,具有潜在的应用价值和理论贡献。
schema to update the support and learn a new map-
ping function from previous support LR/HR patch pairs.
Compared with previous face image SR work, our con-
tribution can be summarized as follows:
Compared with those coding-based methods [1,2,22–25],
which use the strong regularization of “same representa-
tion” for learning, we relax the “same representation” to
“same support”, giving more flexibi lity to the learned
mapping function.
Instead of learning a global mapping function from the
entire training samples as in regression-based methods
[18,26–28], we design to learn the specific mapping
function for each observation (one input LR patch) from
its support LR/HR patch pairs, and thus the learned
mapping function can be tuned towards a specific input
LR patch.
Compared with those regression-based methods
[18,26–28], which ignore the geometry of the HR patch
space, we define the support set by the geometry of the
HR patch space and use the geometry to regularize the
mapping function. With an iterative optimization tech-
nology, the proposed method can produce more
detailed face features step by step.
Note that we previously proposed a regression-based
method, namely Manifold regularized Sparse Support
Regression (MSSR), for general image SR [35]. Although
MSSR and the proposed method all try to learn the
mapping relationship between the LR patches and HR
ones on the support, they have some essential differences.
In particular, MSSR defined the support set of the input LR
patch with these LR training patches with non-zero sparse
coding coefficients. However, due to the fact that many HR
images may correspond to one LR image, the neighbor-
hood relationship of the LR space cannot reflect the truth.
To this end, instead of defining the support set in the LR
image patch space as in MSSR, we obtained the support set
in the HR image patch space (using the estimated HR patch
and leading to HR-LiSR), whose geometry is much more
credible and discriminant than that of the LR image patch
space [31]. Since the target HR patch is unknown in
advance, we formulate the target HR patch SR as an
iterative optimization problem (while the support set
and the mapping function are learned in one time in the
MSSR method). Therefore, the super-resolved results can
be refined step by step. In addition, MSSR aims at super-
resolving the general scene and does not consider the
prior of face image, while LiSR is specially designed for
facial image. Through incorporating the face position prior
(all face images have similar structures and the patches at
the same site are highly related once we align the face
images according to the positions of two eyes), LiSR
establishes model for each position patch but for the entail
face image, thus leading to more flexible SR framework.
1.3. Organization of this paper
The rest of the paper is organized as follows. The details
of the proposed LiSR approach are presented in Section 2.
Comparative results are reported in Section 3 and a brief
discussion is given in Section 4. Finally, we give concluding
remarks and future prospects in Section 5.
2. The proposed algorithm
In this section, we present the detailed procedure of the
proposed approach. W e begin with the terms and notations.
As stated, the problem of face image SR is formulated as the
inference of the HR face image y
t
from an input LR face image
x
t
, given the training sets of HR and LR face images,
Y ¼fy
m
g
M
m ¼ 1
and X ¼fx
m
g
M
m ¼ 1
,whereM denotes the size
of the training sets. As in many face image SR approaches [23–
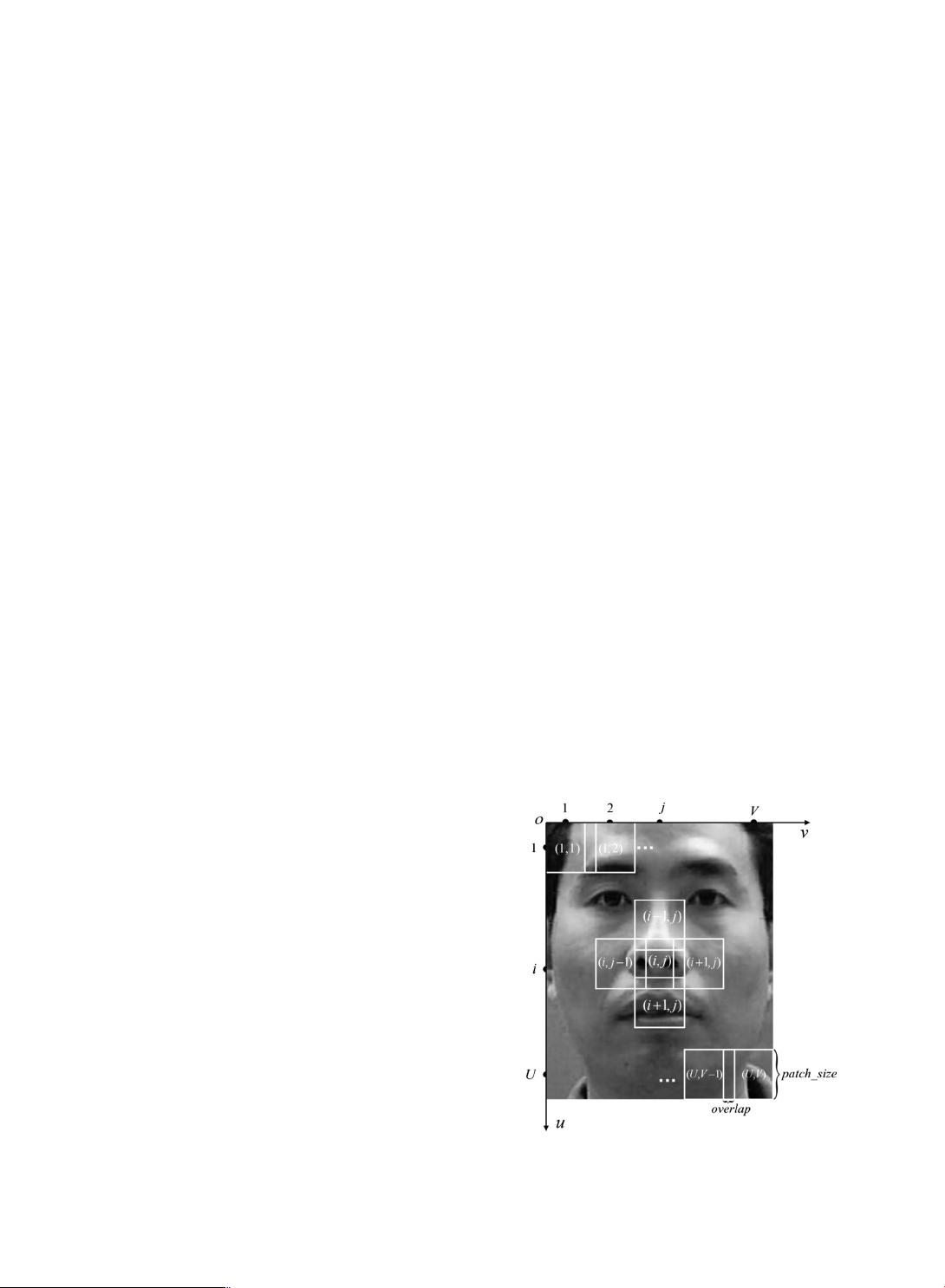
25], we represent each face by image patches. Therefore, each
face image mentioned above is divided into N small over-
lapping patch sets fy
m
ði; jÞj1r ir U; 1r jr Vg
M
m ¼ 1
and
fx
m
ði; jÞj1r i r U; 1r jr Vg
M
m ¼ 1
,thepatchnumberofeach
face image is calculated by N¼ UV, U denotes the patch
number in every column, V denotes the patch number in
every row , and the term (i,j) indicates the coordinate in the
patch coordinate system ouv, as illustrated in Fig. 3.
For one input LR face image denoted in patches as
fx
t
ði; jÞj1r ir U; 1r jr Vg, the face image SR approaches
super-resolve each input LR patch x
t
ði; jÞ to obtain its HR
version y
t
ði; jÞ. Concatenating and integrating all the super-
resolved HR patches fy
t
ði; jÞj1r ir U; 1rjr Vg according
to their corresponding positions, we can obtain a face
image, which is the target HR face image y
t
.
Specially, the coding-based approaches encode the
input LR patch on the LR training patches of the same
position by a linear combination of neighbors, thus obtain-
ing the coding coefficients:
^
θ ¼ arg minf‖x
t
ði; jÞXði; jÞθ‖
2
2
þλEðθÞg; ð1Þ
where Xði; jÞ is a matrix with its columns being training
patches, Xði; jÞ¼½x
1
ði; jÞ; x
2
ði; jÞ; ⋯; x
M
ði; jÞ, EðθÞ is a prior of
the coding coefficients, which enforces the special
Fig. 3. Dividing a face into N¼UV patches. The term ði; jÞ indicates the
coordinate of one patch in the patch coordinate system o–uv. patch_size
and overlap denote the side pixels of one square patch and the overlap
pixels between patches respectively.
J. Jiang et al. / Signal Processing 103 (2014) 168–183 171
剩余15页未读,继续阅读
2015-03-26 上传
2021-09-26 上传
2021-03-10 上传
点击了解资源详情
点击了解资源详情
2012-01-02 上传
2021-05-07 上传
2019-04-10 上传
点击了解资源详情

weixin_38747087
- 粉丝: 77
- 资源: 1267
 我的内容管理
展开
我的内容管理
展开







最新资源
- BeatTheBotChallenge:来挑战这个玩摩托赛车电话游戏的机器人,看看它是如何制造的,并帮助改进它!
- GetHtmlTool:Qt初步获取网页原始码
- StudentClass,java怎么看源码,javap2p网贷源码下载
- 宠物播种机
- zeromq-4.2.0.tar.zip
- nginx-http-concat:WordPress插件可将单个脚本文件CSS和Javascript连接成一个资源请求
- 高级JSON表单规范第2章:输入小部件
- angularjs-studies
- city-generator:C ++ City Generator
- SocketProject:SocketProject
- crawl_html:python网络爬虫-爬网页原始码
- 手写 Volley 网络访问框架
- living-with-django:关于容忍最臃肿的python web框架的博客
- RestaurantsAppWithCollectionViews
- SkeSubDomain:利用递归归,通过匹配网页源码里的子域内容收集所有的子域信息,可收集四级五级等多级子域名
- portfolio:我的投资组合网站,其中包含我的所有工作
