CAN-bus V2.0规范详解:标准与扩展格式
需积分: 10 83 浏览量
更新于2024-07-25
收藏 391KB PDF 举报
CAN-bus规范V2.0版本是针对串行通信广泛应用背景下对通信报文识别位标准化需求的升级。该规范旨在解决原有的11位识别位限制,引入了扩展格式,将地址范围扩大到29位,为系统设计提供了更大的灵活性。它包含两个主要部分:A部分基于CAN1.2标准的报文格式说明,适用于标准格式;B部分则详述了标准格式和扩展格式的差异与使用。
在A部分,内容涵盖了CAN通信的基础,包括:
1. **介绍**:简要介绍了CAN总线的背景,强调了从CAN1.2规范升级到V2.0版本的原因,以及新规范带来的好处。
2. **基本概念**:这部分介绍了CAN报文的基本组成,如帧类型、数据帧、远程帧、错误帧和过载帧等。
3. **报文传输**:详细解释了帧之间的发送、接收机制,包括帧间空间的处理。
4. **发送器/接收器定义**:阐述了CAN设备中的发送和接收角色及其工作原理。
5. **报文校验**:确保数据的准确性和完整性,包括错误检测和标定。
6. **编码**:讨论了CAN信号的编码方式,如标识符编码和数据位编码。
7. **错误处理**:如何识别和处理可能出现的通信错误,包括错误检测机制和故障界定规则。
8. **位定时要求**:规定了CAN总线的时序要求,以保证正确通信。
9. **增加CAN振荡器容差**:针对实际应用中的变化,允许一定程度的频率容错。
10. **协议修改**:针对新规范可能带来的协议更新和兼容性策略。
在B部分,重点在于区分标准格式和扩展格式,并指出在不使用扩展格式的情况下,不同设计的仪器间仍能保持兼容性。这一部分对于那些不需要扩展范围但仍希望利用现有设备的用户特别重要。
CAN-bus规范V2.0版本提供了一套全面且灵活的通信标准,使得更多的应用场景得以支持,同时保持了与早期版本的兼容性,对于理解和设计CAN总线系统具有重要意义。无论是初学者还是专业工程师,都可以从中找到所需的技术细节和指导。
广州周立功单片机发展有限公司 Tel: 020-38730976 38730977 Fax:38730925 http://www.zlgmcu.com
- 7 -
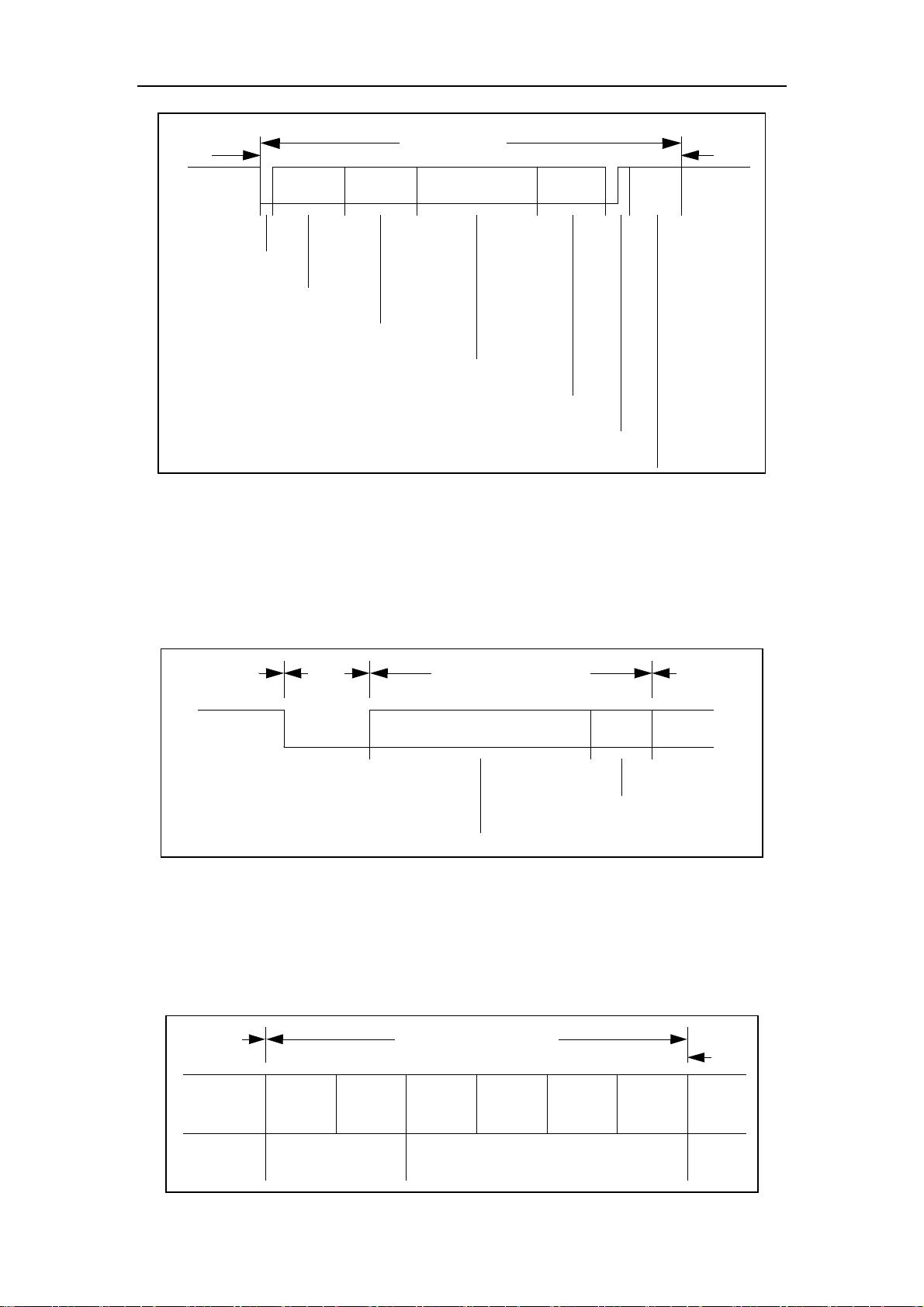
Interframe
Space
Interframe
Space
Start of Frame
Arbitrat ion Field
Cont rol Field
Data Field
CRC F i el d
AC K F ield
End of Frame
or
Overload
Fr a me
DATA F RAME
仲裁场
仲裁场包括识别符和远程发送请求位(RTR)。
识别符:识别符的长度为 11 位。这些位的发送顺序是从 ID-10 到 ID-0。最低位是 ID-0。最高的 7 位
(ID-10 到 ID-4)必须不能全是“隐性”。
RTR 位:该位在数据帧里必须为“显性”,而在远程帧里必须为“隐性”。
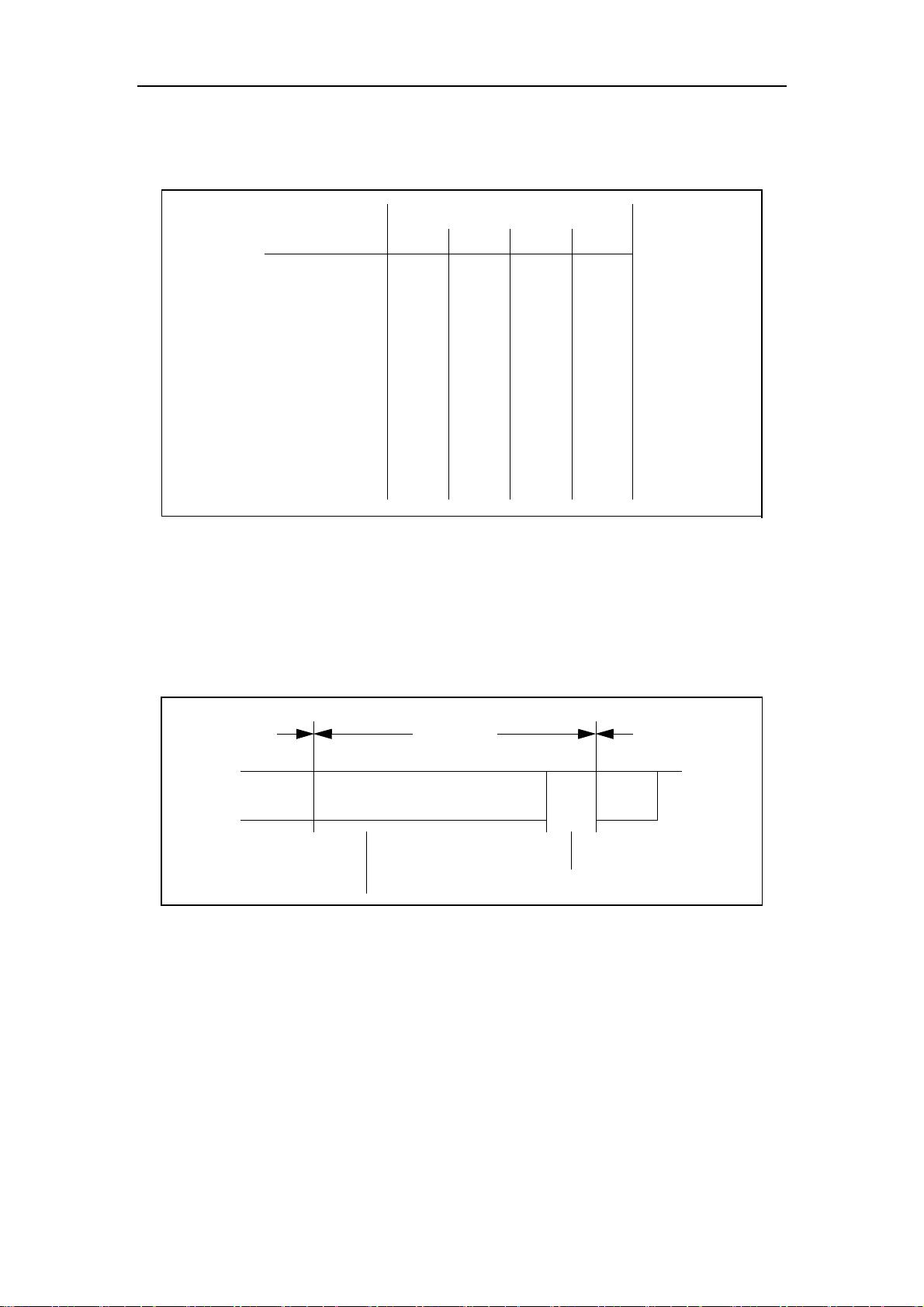
Interframe
Space
St a r t
of Frame
Identifier
RT R B i t
Co n t r o l
Fi e ld
AR BI TRATION F IELD
控制场
控制场由 6 个位组成,包括数据长度代码和两个将来作为扩展用的保留位。所发送的保留位必须为“显
性”。接收器接收所有由“显性”和“隐性”组合在一起的位。
数据长度代码:数据长度代码指示了数据场中字节数量。数据长度代码为 4 个位,在控制场里被发送。
r1 r0 DLC3 DLC2 DLC1 DLC 0
or
CRC
Fi e l d
Ar bit ration
Fi e l d
Dat a
Fi e l d
CO N T RO L F IE L D
Dat a Lengt h Codereserved
bits
剩余35页未读,继续阅读
108 浏览量
132 浏览量
587 浏览量
167 浏览量
2024-10-30 上传
2024-10-30 上传
2024-10-30 上传
630 浏览量
2024-10-25 上传

wangyanchun1983
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 冰箱温度智能控制系统的设计
- MATLAB常用命令
- PLSQL渐进学习教程
- c语言编写的小游戏程序
- div css合成教材
- SQL+Server数据库设计和高级查询(SQL+Advance)2_1
- NET 数据访问架构指南
- ArcGIS平台开发框架介绍及其未来发展.pdf
- C#入门经典代码 Answers
- 模式识别(第二版)(作者:边肇祺) 习题答案
- 51单片机C语言入门教程
- 中国电信 smgp2。0协议
- excel_2003函数应用完全手册
- Software.Architecture.Design.Patterns.in.Java.pdf
- ArcEngine开发说明
- 北大青鸟 深入.NET平台和C#编程 教学资料 PPT6/9
