PyBullet入门教程:连接、模型加载与物理模拟
"PyBullet快速入门手册中文版,由Erwin Coumans和Yunfei Bai于2016-2021年编写,主要介绍了如何使用Python接口进行PyBullet的物理模拟。手册覆盖了PyBullet的基本操作,如连接和断开物理引擎、设置重力、加载模型以及模拟步骤等。"
PyBullet是一个开源的物理模拟库,它提供了Python接口,使得开发者可以方便地进行物理模拟,尤其在机器人学、游戏开发和机器学习等领域有广泛应用。本手册是PyBullet的快速入门指南,旨在帮助初学者快速上手。
1. **连接与断开物理引擎**:PyBullet可以通过多种方式连接到物理引擎,包括`DIRECT`模式(本地直接连接)、`GUI`模式(带图形界面)、`SharedMemory`(共享内存)、`UDP`或`TCP`网络连接。`bullet_client`是连接的客户端对象,使用`connect()`方法建立连接,`disconnect()`方法用于断开连接。`getConnectionInfo()`和`isConnected()`分别用于获取连接信息和检查当前是否已连接。
2. **设置重力**:通过调用`setGravity()`函数,可以设定场景中的重力方向和大小,例如`(0, -9.81, 0)`表示在Y轴方向上应用地球表面的重力。
3. **加载模型**:PyBullet支持多种格式的模型文件,如URDF、SDF和MJCF。`loadURDF()`, `loadSDF()`, `loadMJCF()`这些函数用于导入机器人或其他物体模型,使它们可以在模拟环境中存在。
4. **保存与恢复状态**:`saveState()`和`restoreState()`允许保存当前模拟的状态,以便后续恢复。此外,`saveBullet()`可以将整个模拟环境保存为一个`.bullet`文件,`removeState()`则用于移除当前状态。`saveWorld()`可以将世界状态储存下来,便于复用。
5. **创建形状**:PyBullet提供了创建碰撞形状和视觉形状的功能,如球体、箱体、圆柱体等。`createCollisionShape()`和`createVisualShape()`用于创建单个形状,而`createCollisionShapeArray()`和`createVisualShapeArray()`则可以批量创建。`removeCollisionShape()`和`removeVisualShape()`用于移除不再需要的形状。
6. **创建多体**:`createMultiBody()`函数用于创建具有多个刚体的复杂对象,比如机器人。`getMeshData()`可以获取多体的网格数据,这对于处理复杂的几何结构非常有用。
7. **模拟步进**:`stepSimulation()`是执行物理模拟的核心函数,它会推进模拟的下一帧。在每一帧之间,用户可以调整物体的位置、速度,或者添加外力,然后调用`stepSimulation()`来更新状态。
除了上述内容,手册可能还涵盖了其他高级特性,如关节控制、传感器模拟、碰撞检测、运动学计算等。通过深入学习PyBullet,开发者可以构建高度真实的物理环境,进行复杂的仿真测试和机器学习实验。
12
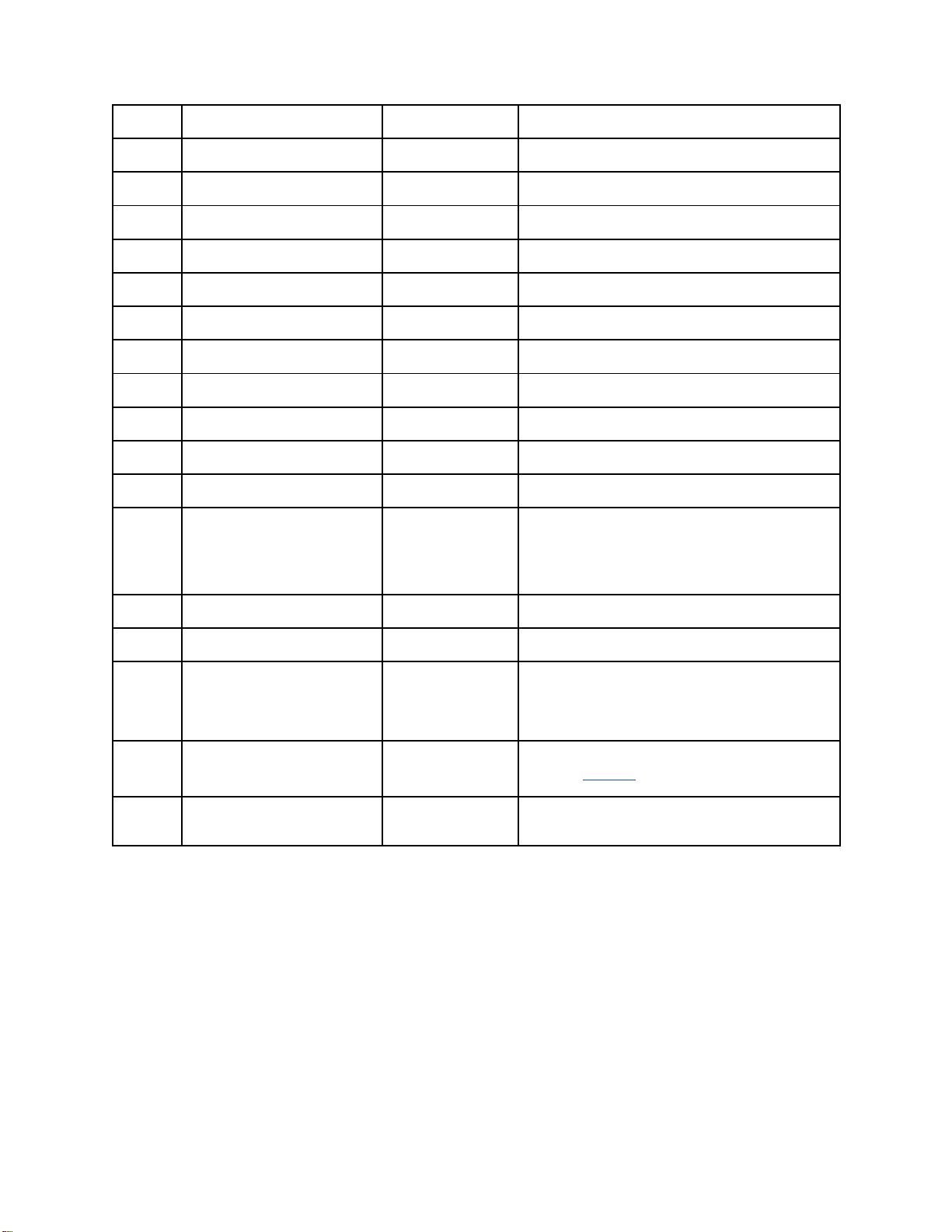
可选用的
height
float
default: 1: for GEOM_CAPSULE, GEOM_CYLINDER
可选用的
fileName
string
Filename for GEOM_MESH, currently only Wavefront .obj. Will
create convex hulls for each object (marked as 'o') in the .obj file.
可选用的
meshScale
vec3 list
of 3 floats
default: [1,1,1], for GEOM_MESH
可选用的
planeNormal
vec3 list
of 3 floats
default: [0,0,1] for GEOM_PLANE
可选用的
flags
int
GEOM_FORCE_CONCAVE_TRIMESH : 对 于
GEOM_MESH,这将创建一个凹形静态三角形网格。 这不应与动态
/移动对象一起使用,仅适用于静态(质量 = 0)地形。
可选用的
collisionFramePo
sition
vec3
碰撞形状相对于连杆框架的平移偏移
可选用的
collisionFrameOr
ientation
vec4
碰撞形状相对于连杆框架的旋转偏移(四元数 x,y,z,w)
可选用的
vertices
list of
vec3
高度场的定义。 见 heightfield.py
可选用的
indices
list of int
高度场的定义
可选用的
heightfieldTextur
eScaling
float
高度场的纹理缩放
可选用的
numHeightfieldR
ows
int
高度场的定义
可选用的
numHeightfieldC
olumns
int
高度场的定义
可选用的
replaceHeightfiel
dIndex
int
替换现有的高度场(更新其高度)(比删除和重新创建高度场快得
多)
可选用的
physicsClientId
int
如果您连接到多台服务器,则可以选择一台。
返回值是碰撞形状的非负 int 唯一 id,如果调用失败,则返回 -1。
1.6.1 createCollisionShapeArray(创建碰撞形状数组)
collisionShapeArray 是创建碰撞形状的数组版本。 有关用法,请参阅有关如何使用它的
snake.py 或 createVisualShapeArray.py 示例。
1.6.2 removeCollisionShape(移除碰撞形状)
removeCollisionShape 将删除现有的碰撞形状,使用其碰撞形状的唯一 ID.
1.6.3 createVisualShape(创建视觉形状)

剩余84页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
143 浏览量
2022-05-06 上传
2021-10-10 上传
2021-08-26 上传
2024-12-13 上传
2021-09-21 上传

qq_43645752
- 粉丝: 1
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
