Halcon 3D分析与竞品比较
版权申诉
本资源是关于Halcon在3D分析领域的应用介绍,主要涉及与竞品的性能比较、参数分析以及一系列3D处理技术,包括点云预处理、点云滤波、点云分割、点云检测、量测、拼接、比对和显示等。此外,还详细讨论了Halcon的VisionWare在这些任务中的表现,以及其与竞品的差异。
在Halcon的3D分析中,点云预处理是一个关键环节,包括中值滤波、均值滤波、平滑滤波和平滑滤波中的移动最小二乘法。Halcon提供了mean_image算子进行均值滤波,而中值滤波则能有效去除噪声,例如,均值滤波的计算时间(CT)为203ms,中值滤波的CT为78ms。平滑滤波通过算子`smooth_object_model_3d`实现,其关键参数包括mls_kNN、mls_order、mls_abs_sigma、mls_relative_sigma和mls_force_inwards,用于控制拟合曲面的方式。
点云分割则涉及到硬阈值分割和连通域分割。通过算子`select_object_model_3d`,可以基于对象点的平均坐标、体积、面积以及点数等参数进行选择和分割。这有助于从点云数据中提取出特定的3D对象模型。
在点云检测和量测方面,Halcon提供了工具来识别和测量3D空间中的特征,如点的位置、形状和尺寸。这在质量控制、自动化生产和机器人导航等领域具有广泛的应用价值。
点云的拼接和比对是另一个重要环节,它们允许用户将来自不同视角或不同时间的点云数据组合成一个完整的3D模型。这在重建场景、追踪物体运动轨迹或者实现精确的3D定位时非常有用。
HalconVisionWare作为Halcon的扩展工具集,可能提供了更高级的3D处理功能。然而,为何选择HalconVisionWare而不是其他竞争产品,需要根据具体应用需求、性能指标、易用性和封装步骤来进行评估。例如,对比竞品在滤波、分割等预处理过程中的效果,以及在点云处理的效率和准确性,可以帮助决定最佳的解决方案。
这份资料深入探讨了Halcon在3D分析中的各种技术和策略,对于理解Halcon在3D视觉处理方面的优势和不足,以及如何选择合适的3D分析工具,提供了宝贵的参考。无论是初学者还是经验丰富的开发者,都能从中受益,提升自己的技术积累。
11
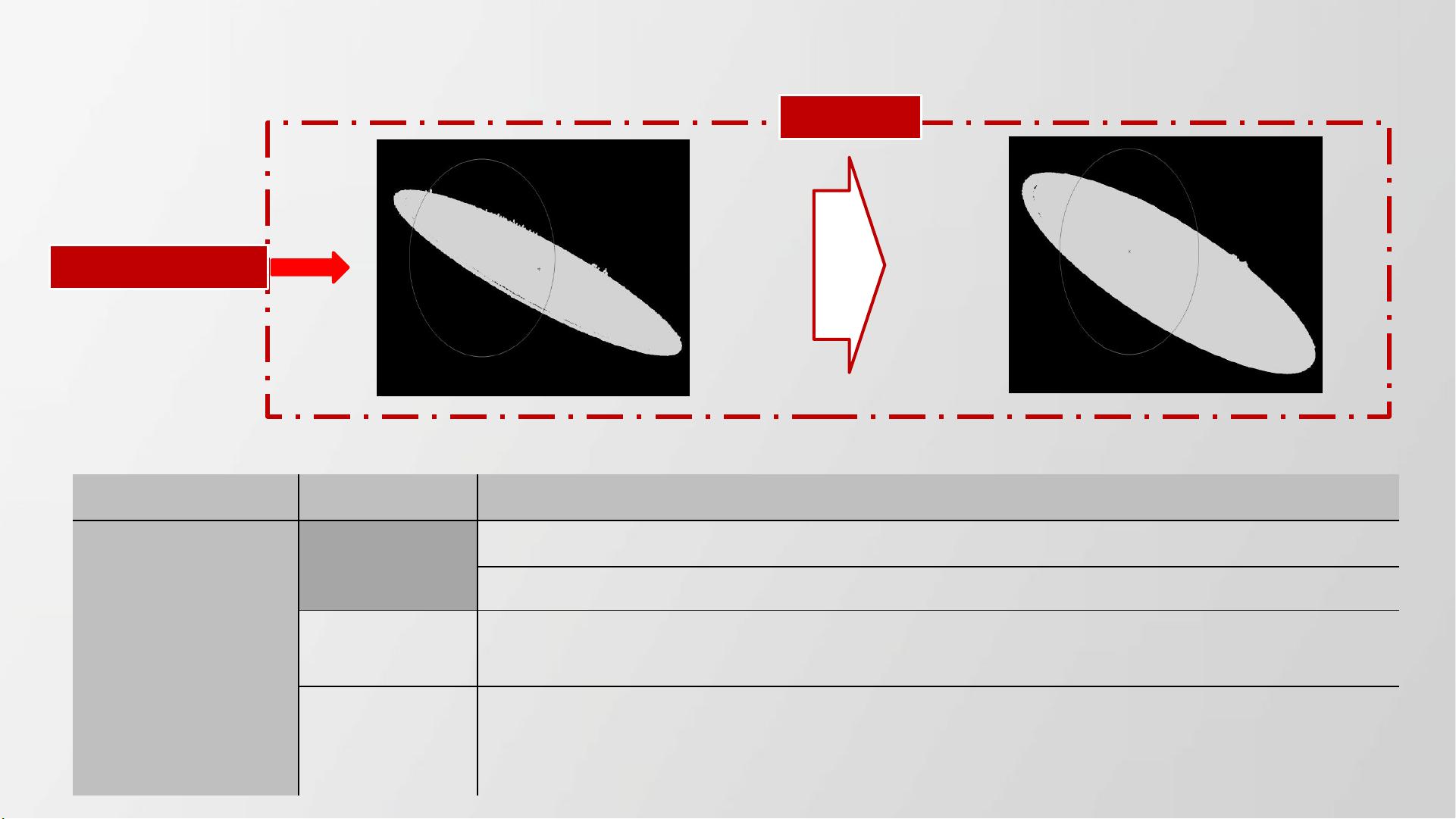
滤波 - 平滑滤波
Halcon
平滑滤波效果
滤波方式 分析项
Halcon
平滑滤波
参数输入
输入 / 输出图像
属性参数名称: mls_kNN ;属性参数值;
性能分析
性能受参数影响较大,特别是邻域数目参数影响比较大,例如邻域设置 10 , CT : 200ms ,设置 100 , CT :
1.7s ;
总结
1 、 VB 中没有专门的点云平滑滤波工具;
2 、对大的噪点过滤效果不太明显,可以配合其他算子使用,例如分割算子,效果更好;
3 、参数设置简单;
剩余63页未读,继续阅读
2020-04-18 上传
2021-08-12 上传
2021-06-28 上传
2021-10-20 上传
2020-10-27 上传

苏州程序大白
- 粉丝: 2w+
- 资源: 208
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入了解Django框架:Python中的网站开发利器
- Spring Boot集成框架示例:深入理解与实践
- 52pojie.cn捷速OCR文字识别工具实用评测
- Unity实现动态水体涟漪效果教程
- Vue.js项目实践:饭否每日精选日历Web版开发记
- Bootbox:用Bootstrap实现JavaScript对话框新体验
- AlarStudios:Swift开发教程及资源分享
- 《火影忍者》主题新标签页壁纸:每日更新与自定义天气
- 海康视频H5player简易演示教程
- -roll20脚本开发指南:探索roll20-master包-
- Xfce ClassicLooks复古主题更新,统一Linux/FreeBSD外观
- 自建物理引擎学习刚体动力学模拟
- Python小波变换工具包pywt的使用与实例
- 批发网导航程序:自定义模板与分类标签
- 创建交互式钢琴键效果的JavaScript库
- AndroidSunat应用开发技术栈及推介会议
