机器人动力学辨识实践:二自由度机械臂MATLAB教程
需积分: 50 179 浏览量
更新于2024-07-16
2
收藏 555KB PDF 举报
"这篇PDF文档是关于动力学辨识在二自由度机器人机械臂中的应用,源自国外某大学的机器人课程作业。它详细阐述了如何进行动力学辨识,涵盖了软件和硬件设计的关键点,对初学者有很好的指导价值。文章由Javier Moreno-Valenzuela、Roger Miranda-Colorado和Carlos Aguilar-Avelar三位作者撰写,并发表在2017年1月的《国际电气工程教育期刊》上,至今已有3次引用,被阅读517次。"
动力学辨识是机器人领域中的一个重要概念,它涉及到理解和模拟机器人的运动行为,以便于设计有效的控制策略。在这个二自由度机械臂的例子中,我们首先会了解到动力学模型的构建,这是辨识的基础。动力学模型描述了力、扭矩与机械臂运动之间的关系,通常通过牛顿-欧拉方法或拉格朗日方程来建立。
在实际操作中,动力学辨识通常包括以下几个步骤:
1. **数据采集**:使用传感器(如编码器、加速度计和扭矩传感器)收集机械臂的运动和力矩数据。这些数据用于后续的分析和模型参数估计。
2. **模型构建**:基于理论力学,构建二自由度机械臂的动力学方程。这通常是一个非线性系统,包含惯性项、向心力项、科里奥利力项和重力项。
3. **参数估计**:利用软件工具(如MATLAB)对模型的未知参数进行估计。这可能涉及到最小二乘法、递归最小二乘法或基于优化算法的方法。
4. **模型验证**:将估计出的模型与实验数据进行比较,评估模型的准确性。这一步骤可能需要多次迭代,调整模型参数以提高预测精度。
5. **应用**:一旦得到准确的动力学模型,可以应用于控制系统的设计,如PID控制器或者更复杂的智能控制策略,以实现精确的定位、轨迹跟踪等任务。
文中提到的MATLAB-based identification procedure(基于MATLAB的辨识程序)是完成这些步骤的有效工具,MATLAB提供了丰富的函数库和可视化工具,方便进行数据分析和模型仿真。两位作者Javier Moreno-Valenzuela和Roger Miranda-Colorado可能在文中详细介绍了如何利用MATLAB进行这些工作,包括数据处理、模型构建和参数估计的具体步骤。
此外,该文还可能涉及到了硬件设计方面,如传感器的选择、安装位置以及数据采集系统的搭建。这对于理解实际动力学辨识过程中的工程问题至关重要。Carlos Aguilar-Avelar作为另一位作者,可能在硬件设计和实现方面贡献了专业知识。
这篇论文不仅提供了一个实践性的动力学辨识教程,而且对于想要深入理解机器人动力学的学生和工程师来说,是一份宝贵的参考资料。通过学习和应用其中的方法,读者可以更好地掌握机器人系统的动态特性,为实际的机器人控制系统设计打下坚实基础。
in class verifies the usefulness of the proposed methodology in teaching practice.
Moreover, this procedure was used by other students to identify a two degrees-of-
freedom planar robot,
14
a brushed direct current motor with pendular load,
15
a
rotary inverted pendulum,
16
an inertia wheel pendulum,
17
and a five-degrees-of-
freedom robot manipulator
18
as part of their thesis work, showing that the pro-
cedure can be easily extended to many types of systems.
This document is organized as follows. The next section describes the general
equations of motion for a two-degrees-of-freedom robot manipulator and the fil-
tered regression model is presented. After this, the practical identification proced-
ure is shown. The experimental platform is described, the program code is
referenced, and the model validation results are discussed. Then follows a descrip-
tion showing how the proposed parameter identification methodology was tested in
a teaching practice. Finally, some concluding remarks are made.
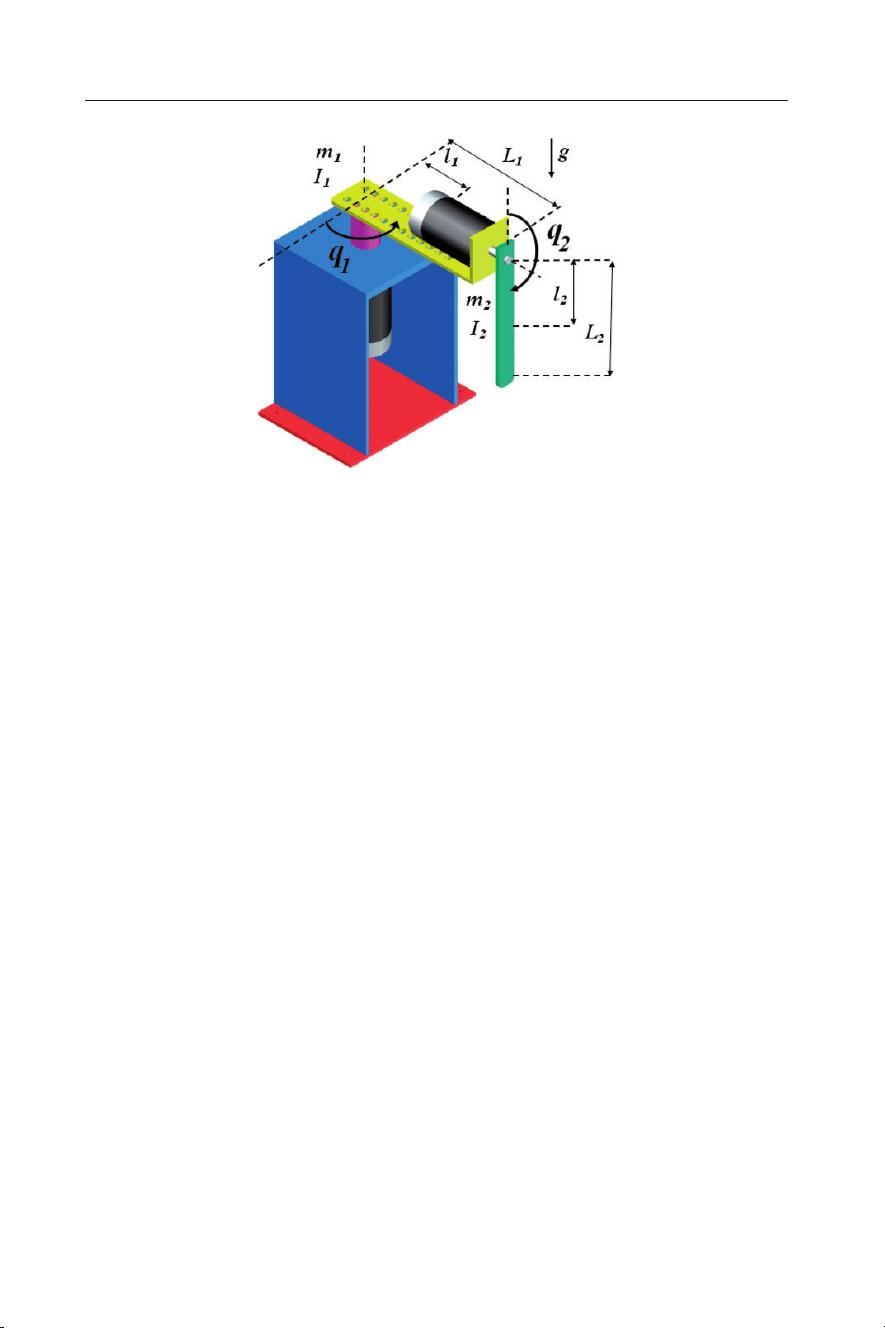
Dynamics of the robot manipulator
As an application example, this work considers the two-degrees-of-freedom rigid
link robot manipulator depicted in Figure 1, whose dynamic model is described by
Euler–Lagrange equations
19,20
MðqÞ
€
q þ Cðq,
_
qÞ
_
q þ F
v
_
q þ f
c
ð
_
qÞþgðqÞ¼s ð1Þ
with
MðqÞ¼
1
þ
2
sin
2
ðq
2
Þ
3
cosðq
2
Þ
3
cosðq
2
Þ
4
"#
Figure 1. Description of the two-degrees-of-freedom robot manipulator to be identified.
4 International Journal of Electrical Engineering Education 0(0)
剩余22页未读,继续阅读
2019-08-13 上传
2013-05-09 上传
2021-09-21 上传
2021-08-13 上传
2020-05-17 上传
2021-09-28 上传
2021-08-14 上传
2021-09-21 上传

剑雨巍巍
- 粉丝: 152
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
