Simulink实验详解:控制系统建模与PID/串级/解耦控制性能研究
本资源是一份关于Simulink控制实验的详细资料,涵盖了多个实验环节,包括过程控制系统建模、PID控制、串级控制、解耦控制系统和比值控制。通过实际操作,学生可以深入理解工业过程动态特性和Simulink软件的应用。
首先,实验一聚焦于过程控制系统建模,涉及单容过程(无自衡与自衡)和多容过程(相互影响与无相互影响)的阶跃响应模拟。通过Simulink,学生学习到如何构建不同类型的动态模型,例如单容过程模型的阶跃响应曲线,以及如何分析二阶系统中两个关键参数(如阻尼比和自然频率)对系统性能的影响。
在实验二PID控制部分,学生通过Simulink构建PID控制器的原理图,调整比例增益(P)、积分增益(I)和微分增益(D)以观察控制效果。纯比例控制展示了比例带对系统性能的影响,包括余差、超调和调节时间。接着,学生进一步探究比例微分(PD)和比例积分(PI)控制的作用,观察它们如何改善系统的稳定性、减小余差和振荡频率。
实验三至五分别涉及到串级控制、解耦控制系统和比值控制,这些都是高级控制策略,用于处理复杂的控制问题,如多变量或干扰变化的环境。这些实验旨在让学生掌握如何在实际工程场景中选择和应用不同的控制策略来优化系统性能。
整个实验过程不仅锻炼了学生的模型构建和仿真技能,还强调了理论知识与实践操作的结合,有助于提升他们对控制理论的理解和实际操作能力。通过分析和比较不同控制策略下的系统响应,学生能够深化对控制系统的认识,为未来从事自动化控制领域的研究或实践打下坚实基础。
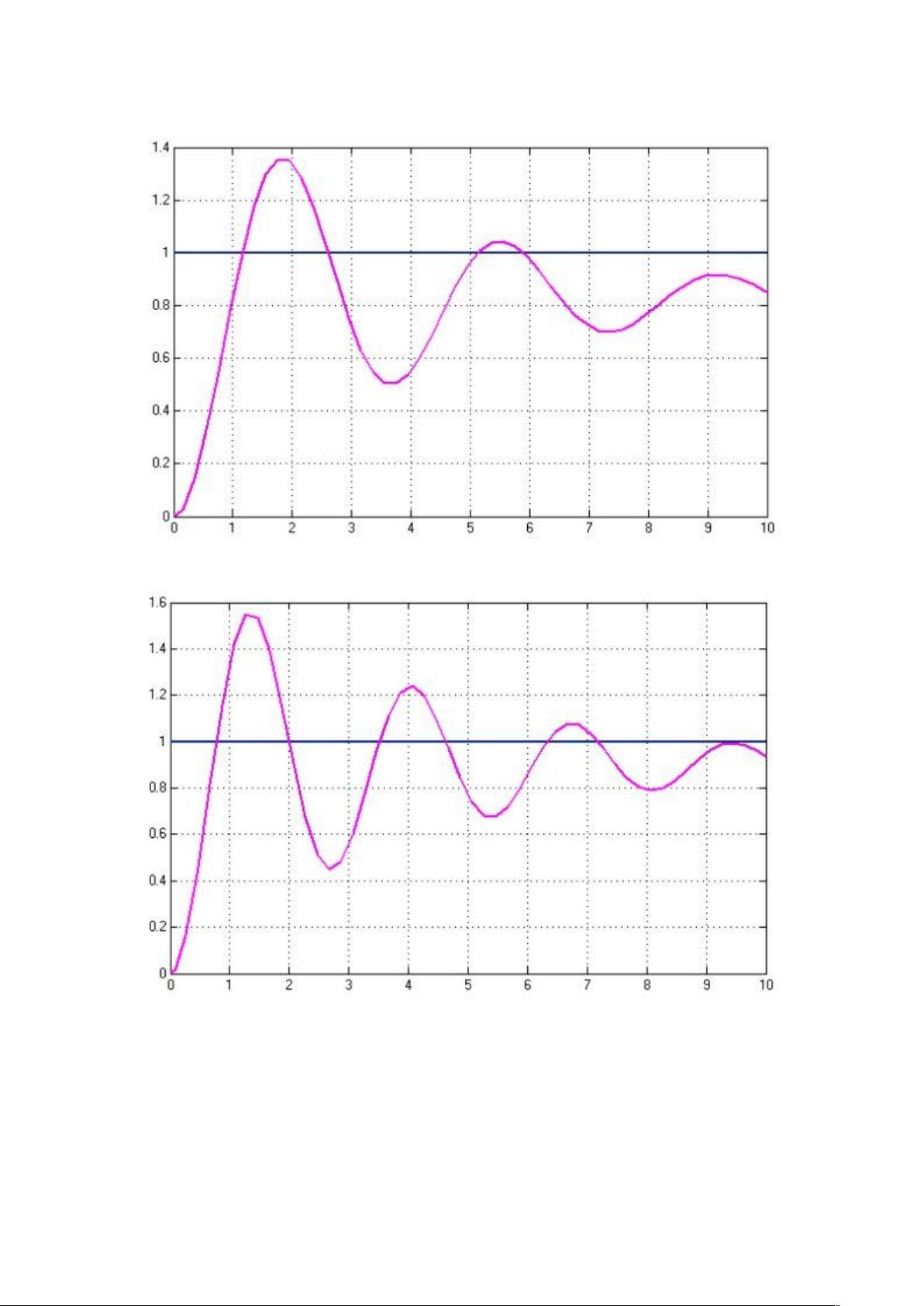
P=10
由以上三组响应曲线可以看出,纯比例控制对系统性能的影响为:
比例调节的余差随着比例带的加大而加大,减小比例带就等于加大调节系统的开环增益,
其后果是导致系统真激烈震荡甚至不稳定,比例带很大时,被调量可以没有超调,但余差
很大,调节时间也很长,减小比例带就引起被调量的来回波动,但系统仍可能是稳定的,
余差相应减少。
4. 重复(步骤 2,3),将控制器的功能改为比例微分控制,观测系统的响应曲线,分析比例
微分的作用。
剩余33页未读,继续阅读
2560 浏览量
992 浏览量
393 浏览量
1211 浏览量
2021-07-10 上传
2024-02-26 上传
2021-05-29 上传
2024-07-13 上传

ayang118
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Oracle数据库常用函数全面汇总与解析
- STM32F系列USB虚拟串口VCP驱动在PC端的实现
- 降雨雷达时空匹配的Matlab代码实现及数据准确性验证
- 教学用渐开线画线器设计文档发布
- 前端图像压缩工具:实现无需服务器的图片优化
- Python 2.7.16 AMD64版本安装文件解析
- VC6.0平台下的高斯混合模型算法实现
- 拼音输入辅助工具suggest实现中文提示功能
- Log4jAPI应用详解与配置操作说明
- 官方下载:最新PX4飞控Pixhawk v5硬件原理图
- 楔铁装置设计文档:截断破碎钢筋砼桩、柱或地梁
- 使用PHP实现Alertmanager与SMS API集成的Webhook
- springboot最简项目搭建教程及文件结构解析
- 纯JS实现的数学表达式计算与解析源码
- C#实现二维码生成与摄像头扫描功能
- Hibernate入门实践教程
