倒立摆控制系统对比研究:遗传算法 vs ANFIS
需积分: 11 161 浏览量
更新于2024-08-12
1
收藏 310KB PDF 举报
"单级倒立摆系统控制方法设计 (2007年),作者:彭自然,罗大庸,张航,来源:湖南工业大学学报,第21卷第2期,2007年3月"
倒立摆系统是一种经典的非线性动力学系统,因其对控制策略的高要求而被广泛用于测试和验证各种控制算法的效果。这种系统由一个固定在枢轴上的重物组成,重物试图使系统翻倒,而控制器的任务是保持系统的稳定。单级倒立摆尤为复杂,因为它只有一个自由度,因此控制它的平衡极具挑战性。
本文探讨了两种不同的控制方法——遗传算法(Genetic Algorithm, GA)和自适应神经模糊推理系统(Adaptive Neuro-Fuzzy Inference System, ANFIS)在倒立摆控制系统中的应用。遗传算法是一种基于生物进化原理的全局优化方法,它能有效地搜索解决方案空间,尤其在处理大规模问题时表现出高效性。另一方面,ANFIS是一种融合了神经网络和模糊逻辑的智能控制系统,它可以快速收敛,但其鲁棒性相对较低。
作者通过实验对比发现,基于ANFIS的倒立摆控制系统虽然计算量较小,收敛速度快,但这并不意味着它具有更强的鲁棒性。相比之下,遗传算法设计的控制器在面对系统不确定性或干扰时表现出了更好的稳定性和鲁棒性。遗传算法的优势在于其对问题规模的扩展有较好的适应性,随着问题复杂性的增加,其解决效率的优势更加显著。
关键词涉及到的领域包括遗传算法、自适应神经模糊推理系统以及控制系统设计。遗传算法的使用表明,在解决倒立摆这样的动态平衡问题时,它能够有效搜索控制参数,达到稳定的控制效果。而ANFIS则提供了一种快速学习和适应环境变化的途径,尽管其在某些情况下可能不如遗传算法稳定。
这篇论文为控制理论与实践提供了有价值的参考,强调了在选择控制策略时需要考虑的具体因素,如计算效率、收敛速度和鲁棒性。这为后续研究者在设计类似复杂系统的控制策略时提供了指导,有助于优化控制算法的选择和改进。
第
21
卷第
2
期
2007
年
3
月
湖南工业大学学报
Journal
of
Hunan
University of Technology
单级倒主摆系统控制方法设计
彭自然,罗大庸,张航
(中南大学信息科学与工程学院,湖南长沙
410083
)
Vo
1.
21
No.2
M
缸.
2007
摘
要:倒立摆系统以其自身的不稳定性为系统的平衡提出了难题,也因此成为自动控制实验中验证控制算法
优劣的极好的实验装直。通过比较分析遗传算法与自适应神经模糊推理系统两种不同方法在倒立摆控制系统中的应
用,并实验证实:使用基于
ANFIS
倒立摆系统计算量小,收敛快,但是其鲁棒性却不如基于遗传算法所设计的控
制其好;遗传算法求解问题的效率高,且随着问题规模的扩大,优势更为突出。
关键词:遗传算法;自适应神经模糊推理系统;控制系统
中图分类号:
0175
文献标识码
:A
文章编号
1673-9833(2007)02-0053-05
Design
and
Realization of Single Inverted-Pendulum
Control
System
Peng Ziran, Lou Dayong, Zhang Hang
(
College
of
Information
Science
and
Engineering ,
Central
South
University ,
Changsha
410083
, China)
、
Abstract:
Inverted-pendulum system is difficult to control because
of
its
in~tability.
Aiming at the control strategy in
automatic control experiments
, it approves that on the basis
of
ANFIS , the single inverted-pendulum control shows the
algorithm is veracious and its convergence is faster than other one which based on genetic algorithm between the different
methods through the analyses. Genetic algorithm has a better efficiency and has more superiority in scale expanding.
Key words: genetic algorithm; ANFIS; control system
。
前言
单级倒立摆是一种典型的多变量、非线性、强精
合的不稳定系统,对它的研究可归结为对多变量非
线性系统的研究,具有一定的理论价值
[IJ
。从工程应
用上讲,卫星的姿态控制、机器人的关节运动控制
和起重机械的稳钩装置等都和倒立摆模型有相似之
处[气所以,对倒立摆系统的控制研究具有重要的工
程背景和实际意义。
在某机械臂的设计过程中,将机械臂当作→个倒
立摆来分析。通过比较两种方法在倒立摆控制系统中
的应用,得出了最适用于本系统的一种方法。
收稿日期:
2007-01-25
1
倒立摆控制系统的数学模型
图
1
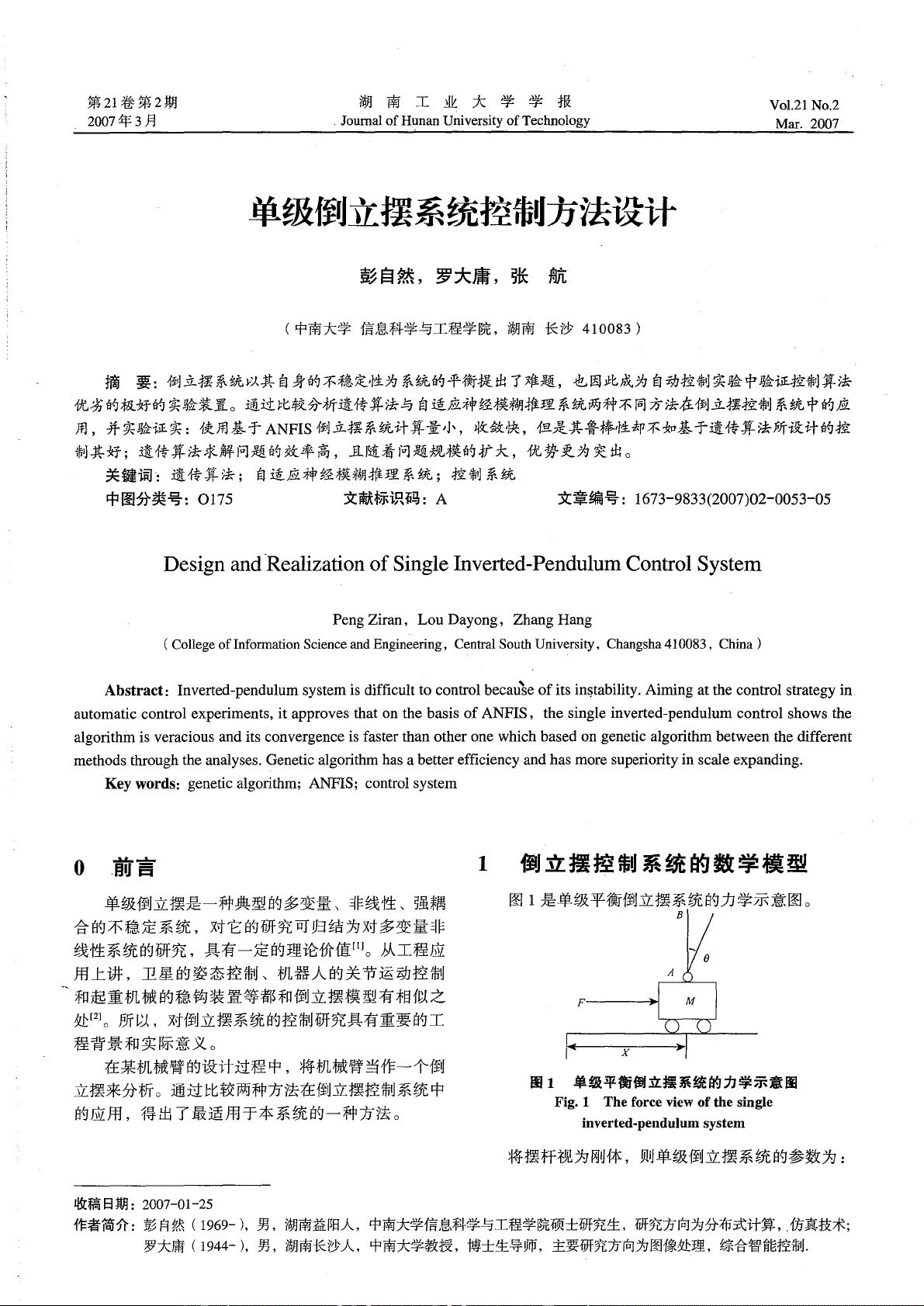
是单级平衡倒立摆系统的力学示意图。
B
F
X
图
1
单级平衡倒立摆系统的力学示意固
Fig. 1 The force
view
of the single
inverted-pendulum system
将摆杆视为刚体,则单级倒立摆系统的参数为:
作者简介:彭自然(
1969-
),男,湖南益阳人,中南大学信息科学与工程学院硕士研究生,研究方向为分布式计算,仿真技术;
罗大庸(
1944
斗,男,湖南长沙人,中南大学教授,博士生导师,主要研究方向为图像处理,综合智能控制.
下载后可阅读完整内容,剩余4页未读,立即下载
2020-07-27 上传
2017-04-18 上传
2021-09-10 上传
2020-06-12 上传
2021-10-12 上传
2021-12-02 上传

weixin_38532139
- 粉丝: 5
- 资源: 910
 我的内容管理
展开
我的内容管理
展开







最新资源
- Elasticsearch核心改进:实现Translog与索引线程分离
- 分享个人Vim与Git配置文件管理经验
- 文本动画新体验:textillate插件功能介绍
- Python图像处理库Pillow 2.5.2版本发布
- DeepClassifier:简化文本分类任务的深度学习库
- Java领域恩舒技术深度解析
- 渲染jquery-mentions的markdown-it-jquery-mention插件
- CompbuildREDUX:探索Minecraft的现实主义纹理包
- Nest框架的入门教程与部署指南
- Slack黑暗主题脚本教程:简易安装指南
- JavaScript开发进阶:探索develop-it-master项目
- SafeStbImageSharp:提升安全性与代码重构的图像处理库
- Python图像处理库Pillow 2.5.0版本发布
- mytest仓库功能测试与HTML实践
- MATLAB与Python对比分析——cw-09-jareod源代码探究
- KeyGenerator工具:自动化部署节点密钥生成
