CODESYS V3.5 Runtime System详解与架构文档
需积分: 36 12 浏览量
更新于2024-07-15
1
收藏 1.62MB PDF 举报
《CODESYS Control V3 手册》是一份详细介绍了CodeSys V3.5 Runtime System (RTS) 的移植和架构的文档。CodeSys是一个流行的二次开发平台,它不仅支持传统的梯形图编程,还兼容IEC标准的ST语言,适用于构建复杂的逻辑控制应用。手册主要涵盖了以下几个关键部分:
1. **介绍**:首先,文档概述了运行时系统在整个系统中的角色,解释了它的使命,即在实时系统中提供高效、灵活和稳定的控制功能。
2. **架构**:这部分深入解析了CodeSYS Control V3的体系结构,包括整体的概述、技术基础(如ANSI-C和C++的使用)、单一源代码的优势,以及其紧凑运行时的特性。其中,紧凑下载格式允许高效的资源管理和部署。此外,文档详细讨论了错误代码管理、对象句柄的概念、函数调用和数据导入/导出的约定,以及M4机制,包括接口描述文件和依赖描述文件的作用。
3. **核心组件与主要功能**:手册接着介绍了核心组件的功能,如启动和关闭过程,包括初始化时的设置、系统的运行模式,以及程序的终止阶段。这部分还涵盖了组件接口架构,包括函数调用约定(caller convention)、导出约定(export convention)、导入约定(import convention)以及用于确保代码质量的检查函数。
4. **源代码结构**:手册描述了运行时系统的源代码组织结构,帮助用户理解如何构建和维护系统。同时,文档列出了目标系统上的各种文件,如启动项目、I/O管理器、用户管理系统和可视化工具。
通过这份文档,开发者可以全面了解如何在实际项目中利用CodeSYS Control V3进行高效、标准化的PLC编程,确保系统的稳定性和兼容性。无论是初次接触CodeSYS还是深入研究的用户,都可以从中找到所需的信息来优化他们的自动化解决方案。
CODESYS Control V3 Manual
In the starter-package of the runtime system you can find a template for a Compact Runtime with the
corresponding "RTS Configurator" project. This can be used as a template to create own compact
runtime systems.
2.3.1.1 Compact download format
With the version V3.4.1.0 of the runtime system, a new download format is designed especially for
embedded runtime systems to fulfill the following requirements:
Easy to implement the download service in the runtime system
Easy to implement storing and loading the boot project
Ability to run the boot project directly out of flash memory
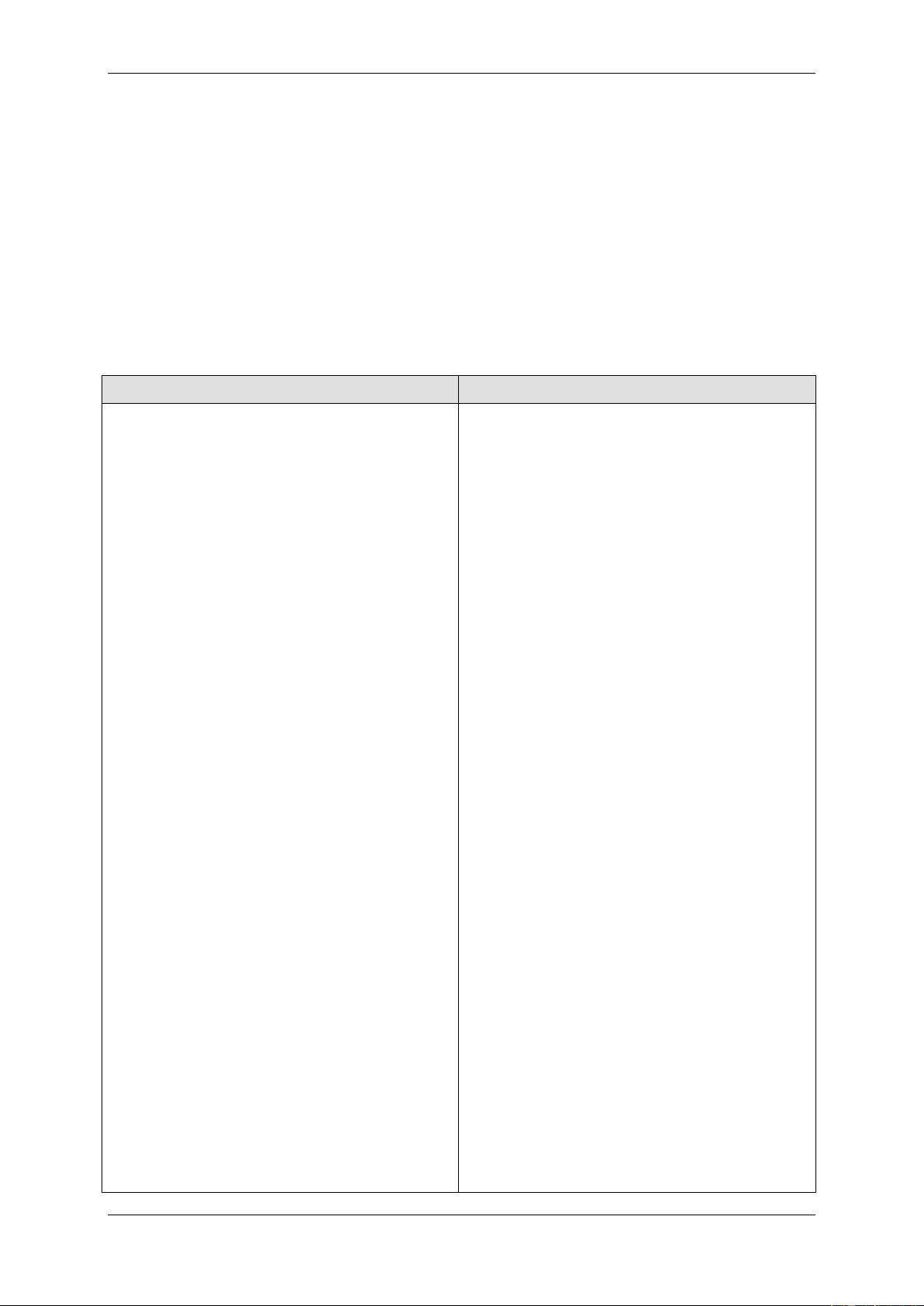
For this, a new download format is created. It consists of a contiguous binary stream with the following
different content segments:
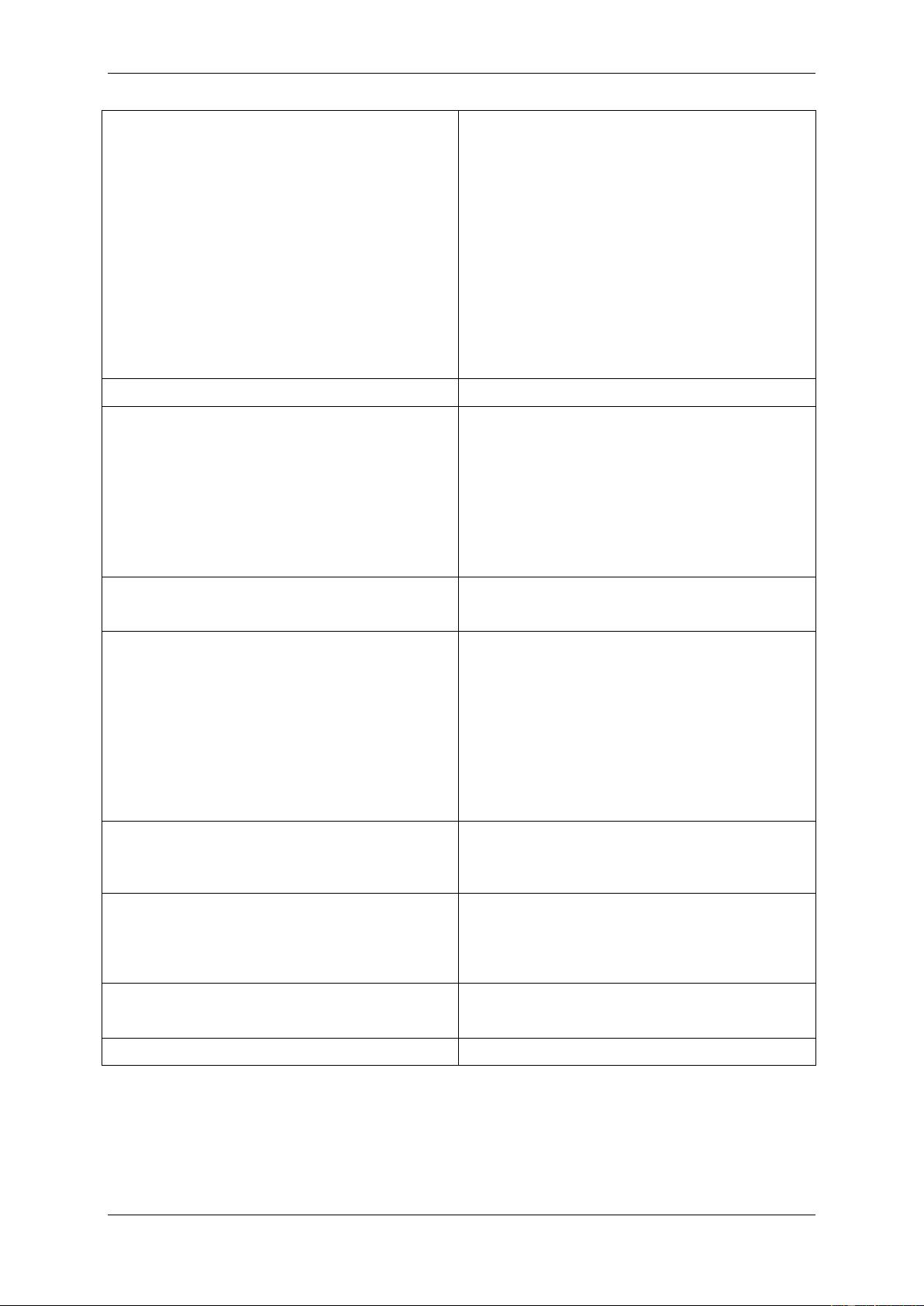
Segment
Description
CodeHeader:
RTS_UI32 ulHeaderTag;
RTS_UI32 ulHeaderVersion;
RTS_UI32 ulHeaderSize;
RTS_UI32 ulTotalSize;
RTS_UI32 ulDeviceType;
RTS_UI32 ulDeviceId;
RTS_UI32 ulDeviceVersion;
RTS_UI32 ulFlags;
RTS_UI32 ulCompilerVersion;
RTS_UI32 ulCodeAreaSize;
RTS_UI16 usCodeAreaIndex;
RTS_UI16 usCodeAreaFlags;
RTS_UI32 ulOffsetCode;
RTS_UI32 ulSizeCode;
RTS_UI32 ulOffsetApplicationInfo;
RTS_UI32 ulSizeApplicationInfo;
RTS_UI32 ulOffsetAreaTable;
RTS_UI32 ulSizeAreaTable;
RTS_UI32 ulOffsetFunctionTable;
RTS_UI32 ulSizeFunctionTable;
RTS_UI32 ulOffsetExternalFunctionTable;
Header of the stream:
HeaderTag=0x1234ABCD
HeaderVersion=0x00000001
HeaderSize=104
Total size of header including all segments
Device type of the selected device
DeviceID of the selected device
Device version of the selected device
Download Flags
Compiler version of used CODESYS version
Code area size
Code area index
Code area flags
Offset in bytes, where the code segment begins
Size in bytes of the code segment
Offset in bytes, where the application info
segment begins
Size in bytes of the application info segment
Offset in bytes, where the area table segment
begins
Size in bytes of the area table segment
Offset in bytes, where the function table segment
begins, Here the link function are specified:
- CodeInit
- GlobalInit
- GlobalExit
- Reloc
- DownloadCode
- TargetInfo
Size in bytes of the function table segment
Offset in bytes, where the external function table
segment begins to link c functions against iec
code
3S-Smart Software Solutions GmbH Page 16 of 219
CODESYSControlV3_Manual.doc
tech_doc_e.doc / V1.2


剩余218页未读,继续阅读
点击了解资源详情
点击了解资源详情
145 浏览量
2022-09-23 上传
2019-06-03 上传
198 浏览量

plcyshx
- 粉丝: 1
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 周立功 RS485通讯 51单片机
- 网络编程 Web编程
- MC9S08AC60单片机数据手册(英文)
- java2d教材 .
- C#完全手册.pdf
- CRC算法原理及C语言实现.pdf
- BGP.Internet.Routing.Architectures.2nd.Edition.2000
- S3C44B0试验配置
- 自地球诞生以来最全的C语言笔试面试题!将近有250页的word文档!
- VC&MFC讲解教材
- 高质量C-C++编程指南
- XMPP核心(PDF)
- struts入门详解(初学者)
- 索尼(SONY)DSR-190P 数码摄像机说明书
- 学习ASP.NET的最优顺序(好的计划等于效率的提高)
- 关于智能手机的学习资料《智能手机》
