μC/OS-II操作系统在FlexRay线控转向通信中的应用
11 浏览量
更新于2024-09-02
1
收藏 295KB PDF 举报
"嵌入式系统/ARM技术中的基于μC/OS-Ⅱ的线控转向FlexRay通信控制 嵌入式系统/ARM技术"
嵌入式系统和ARM技术在现代汽车工业中的应用越来越广泛,特别是在汽车线控转向系统中。线控转向技术是一种先进的车辆控制系统,它通过电子信号而非机械连接来实现车辆的方向控制,极大地提高了驾驶的安全性和舒适性。然而,这种技术的实现依赖于高效、可靠的通信总线,FlexRay便是其中之一。
FlexRay总线作为一种高级的汽车通信协议,具有高速率(最高可达10MB/s)和高度确定性的消息传输时间,这使得它特别适用于需要实时性的汽车控制系统,如线控转向系统。FlexRay的双通道设计提供了容错功能,确保了即使在单个通道故障的情况下,系统仍能保持通信,从而增强了系统的可靠性和安全性。
然而,FlexRay的复杂性和对实时性的高要求意味着传统的嵌入式编程方法,如简单的循环和中断服务程序,难以满足其需求。这时,引入实时操作系统(RTOS)如μC/OS-II就显得至关重要。μC/OS-II是一款轻量级、可移植的RTOS,它支持多任务调度,可以有效地管理和优化资源,保证各个任务的实时执行。
在基于μC/OS-II的FlexRay通信控制设计中,通过创建多个任务来处理不同的通信功能,如状态监控、数据传输和故障检测。这种方式不仅解决了资源浪费的问题,还避免了可能的死锁情况,提高了系统的稳定性。此外,通过在系统中集成故障检测报警功能,一旦检测到通信异常,能够立即发出警告,进一步增强了系统的可靠性。
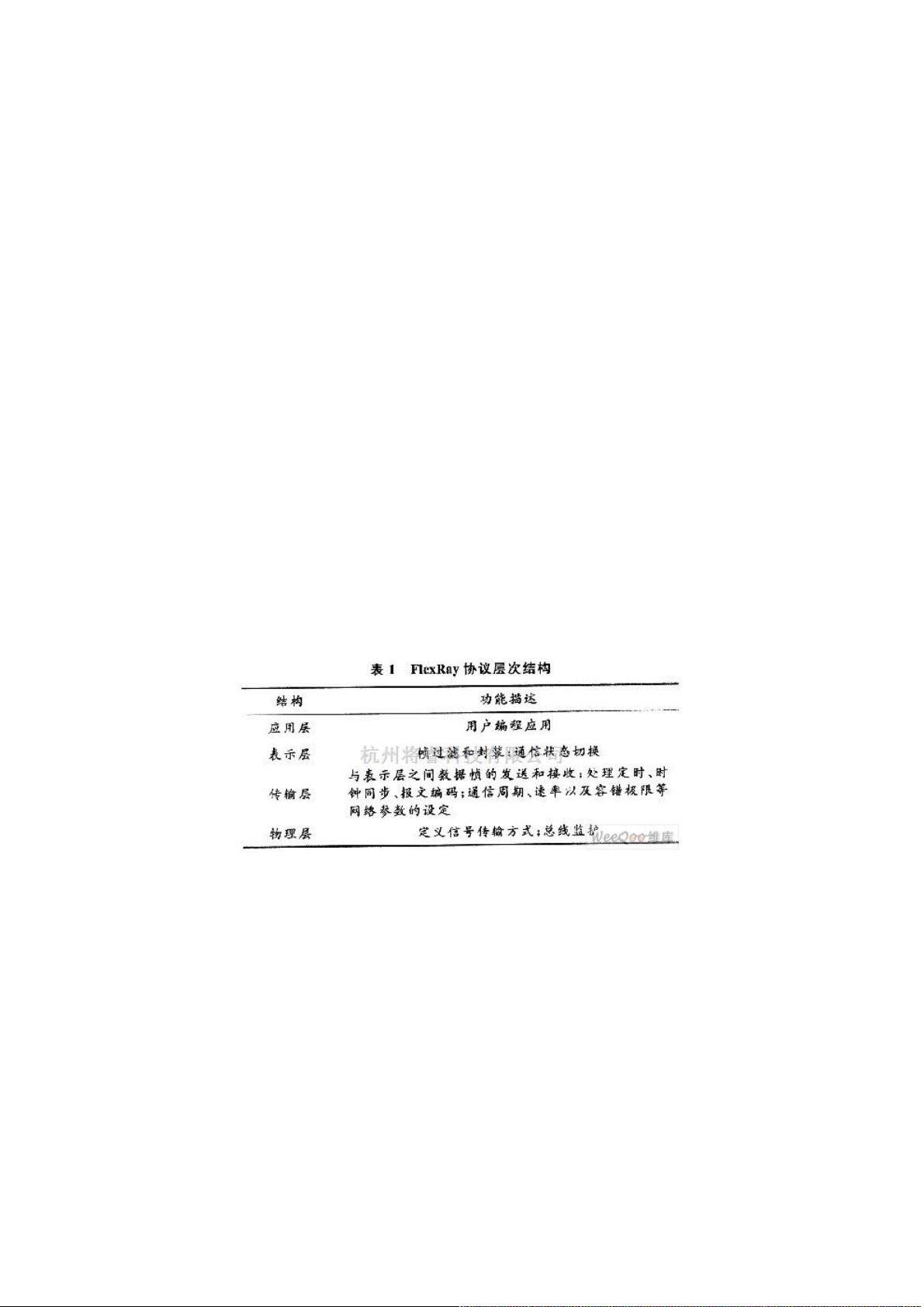
FlexRay通信协议的四层结构(物理层、传输层、表示层和应用层)确保了数据的完整性和一致性。物理层负责实际的信号传输,传输层处理数据帧的编码和解码,表示层管理通信状态的转换,而应用层则直接与具体的应用软件接口,实现特定的控制功能。
在汽车线控转向系统中,FlexRay总线的使用需要考虑多种因素,例如网络配置、错误处理机制、通信同步以及与其它车载系统的兼容性等。通过精细设计和优化,基于μC/OS-II的操作系统能够有效管理这些复杂的交互,确保线控转向系统的高效运行。
基于μC/OS-II的嵌入式系统在汽车线控转向技术中扮演着核心角色,通过FlexRay总线实现高速、实时的通信控制,提升了汽车的智能化水平和驾驶体验。这种结合了先进通信技术和实时操作系统的解决方案,为未来汽车行业的创新和发展奠定了坚实的基础。
嵌入式系统嵌入式系统/ARM技术中的基于技术中的基于μC/OS-Ⅱ的线控转向的线控转向FlexRay通通
信控制信控制
0 引言 近年来,随着汽车工业和电子工业的不断发展,汽车线控转向技术成为了研究的热点,并提出了包
括路感模拟、转向稳定性以及总线技术等诸多关键性问题并加以研究。其中的总线技术,已经得到了众多知名
汽车公司的积极研究与应用。一些汽车制造商目前计划采用FlexRay总线,这是一种特别适合下一代汽车应用的
网络通信总线,具有容错功能和确定的消息传输时间,能够满足汽车控制系统的高速率通信要求。
FlexRaY是时间触发的通信总线,对实时性要求较高,因此仅仅依靠由简单循环和中断服务程序组成的嵌入式程
序将无法满足要求。同时,FlexRay通信在启动和运行过程中,需要利用循环对总线状态进行查询,既浪费
0 引言
近年来,随着汽车工业和电子工业的不断发展,汽车线控转向技术成为了研究的热点,并提出了包括路感模拟、转向稳定
性以及总线技术等诸多关键性问题并加以研究。其中的总线技术,已经得到了众多知名汽车公司的积极研究与应用。一些汽车
制造商目前计划采用FlexRay总线,这是一种特别适合下一代汽车应用的网络通信总线,具有容错功能和确定的消息传输时
间,能够满足汽车控制系统的高速率通信要求。
FlexRaY是时间触发的通信总线,对实时性要求较高,因此仅仅依靠由简单循环和中断服务程序组成的嵌入式程序将无法
满足要求。同时,FlexRay通信在启动和运行过程中,需要利用循环对总线状态进行查询,既浪费大量的系统资源,又容易造
成程序死锁,成为应用中的难点问题。
基于上述问题,本文基于μC/OS-II操作系统,设计了线控转向中FlexRay总线的通信部分。在满足实时性要求的基础
上,利用其多任务的特点,节约了系统资源,避免了死锁问题的出现,并增加了通信故障检测报警功能,为今后开发线控转向
系统奠定了基础。
1 FlexRay总线技术
为了满足汽车线控技术的需求,FlexRay联盟于2005年发布了FlexRay总线协议。其主要特点有:双通道传输,每个通道
的传输速率高达lO Mb/s;具有灵活的使用方式,支持多种网络拓扑结构;负载率高;提供冗余机制。
从开放式系统互连参考模型角度来看,FlexRay通信协议定义了四层结构:物理层、传输层、表示层和应用层,各层功能
描述见表1。表示层中,通信状态切换控制整个FlexRay通信的运行过程,具有十分重要的作用。
FlexRay协议操作控制(Proposal Operation Control,POC)将通信状态分为几种状态,分别为:配置状态(默认配置、配
置);就绪状态;唤醒状态;启动状态;正常状态(正常主动、正常被动);暂停状态。其状态转换图如图1所示。当控制器主机
接口(Controller Host Interface,CHI)给通讯控制器(CC)发送命令后,CC从暂停状态进入默认配置状态,满足配置条件后进入
配置状态,完成网络初始化和节点通信任务初始化;之后可以进入就绪状态,完成节点内部通信设置,如果没有满足通信就绪
条件,就返回配置状态继续配置;在就绪状态,CC可以发送唤醒帧,唤醒网络中没有在通信的节点,也可以获得CPU的启动
通信命令,完成与FlexRay网络时钟同步;启动成功后进入正常状态,完成数据的收发;当出现错误时,可由正常状态进入暂
停状态,重新等待CHI命令。
由此可见,控制器需要按照POC状态进行相应操作,因此会出现对POC状态的循环检测,容易造成程序死锁以及占用大
量系统资源。按照操作系统的介绍,其任务是以循环的形式存在的,因此可以将检测POC状态放入任务中单独执行,通过操
作系统进行任务调度,可以避免影响到其他任务中程序的运行,并且提高程序的执行效率。
2 基于MC9S12XF512的μC/OS-Ⅱ移植
μC/OS-Ⅱ是源码公开的操作系统,具有执行效率高、占用空间小和实时性能优良等特点。利用该操作系统的任务机制,
设计实现Flex-Ray协议,可以大大提高系统的实时性和稳定性,并且可以避免检测POC状态时的死锁现象。
目前市场上支持FlexRay通信的单片机较少,只有Freescale公司的技术比较成熟。考虑到成本问题,选择16位单片机
MC9S12XF512作为系统控制器芯片。操作系统的使用首先要解决的就是移植问题。根据μC/OS-Ⅱ的文件结构,移植时需要
对OS_CPU.H,(OS_CPU_A.ASM和OS_CPUC.C三个文件进行修改,以适合MC9S12xF512芯片的需要。
下载后可阅读完整内容,剩余4页未读,立即下载
2020-10-25 上传
144 浏览量
1161 浏览量
131 浏览量
222 浏览量
221 浏览量
151 浏览量
159 浏览量
181 浏览量

weixin_38537689
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 理解AJAX基础与实现
- BEA Tuxedo精华贴总结:程序示例与环境变量设置
- TUXEDO函数详解:tpalloc, tprealloc, tpfree, tptypes与FML操作
- Windows CE预制平台SDK掌上电脑1.1中文版使用指南
- 21DT数控车床编程指南:操作与编程指令详解
- 随机化算法:原理、设计与应用探索
- PB编程入门:核心函数详解与知识架构构建
- Ant实战教程:从入门到精通
- DB2 SQL语法指南:从创建到索引详解
- Java GUI设计入门:AWT与Swing解析
- VCL 7.0继承关系详解:完整对象树与可用版本区分
- 十天精通ASP.NET:从安装到实战
- 有效软件测试的关键策略
- ARM ADS1.2开发环境与AXD调试教程
- 详述JSTL:核心、I18N、SQL与XML标签库解析
- ×××论坛系统概要设计说明书
