使用Microsoft Robotics Development Studio开发机器人技术
"Robot Development Using Microsoft Robotics Development Studio"
本书《Robot Development Using Microsoft Robotics Developer Studio》深入探讨了使用微软机器人开发工作室(Microsoft Robotics Developer Studio,简称MRDS)进行机器人开发的编程技术。作为一本专注于MRDS的稀缺资源,它由Shih-Chung Kang、Wei-Tze Chang、Kai-Yuan Gu和Hung-Lin Chi合著,由CRC Press出版,是Taylor & Francis Group的一个分支。
MRDS是一个综合的、基于Windows的开发环境,旨在简化和促进各种技能水平的开发者对机器人的编程。它提供了一个仿真平台,允许开发者在实际硬件部署之前测试和调试他们的代码。MRDS支持多种编程语言,包括C#和VB.NET,使得熟悉这些语言的程序员能够快速上手。
书中详细讲解了如何利用MRDS创建、设计和控制机器人系统。内容可能涵盖了基础的机器人概念,如传感器和执行器的工作原理,以及如何在MRDS中集成这些组件。此外,可能还讨论了机器人导航、避障算法、路径规划和行为建模等高级主题。
读者将了解到如何利用MRDS的可视化工具来构建和模拟机器人的行为,以及如何通过网络和通信协议与外部设备交互。此外,书中的实例和项目可能引导读者实践从简单任务到复杂自主行为的机器人程序设计。
本书还可能强调了软件工程的最佳实践,如模块化设计、错误处理和测试,这些都是确保机器人程序可靠性和稳定性的关键因素。对于有兴趣在学术研究、工业应用或娱乐领域探索机器人技术的读者来说,这本书是一个宝贵的资源。
尽管MRDS已经在2011年后不再更新,但其理念和方法对于理解现代机器人开发仍然有价值。许多概念和技术,如仿真、多机器人协作和实时系统控制,都是当今机器人学的核心部分。因此,即便MRDS软件本身已经过时,书中介绍的原理和实践经验仍然适用于其他类似开发平台,如ROS(Robot Operating System)。
《Robot Development Using Microsoft Robotics Developer Studio》是一本为那些希望通过编程实现机器人梦想的人提供的指南,无论他们是初次接触机器人学还是有经验的开发者。通过学习这本书,读者将获得机器人开发的坚实基础,以及在这一领域进一步探索的能力。
1
1Chapter
Challenges and Solutions
in Robotics
T
ro bot the ctional novel titled Rossum’s Universal
Robots
*
published in 1921 by the Czechoslovakian writer Karel Capek. In the novel,
an R.U.R. (i.e., Rossum’s Universal Robot), which is the equivalent of a robot, is described
to be composed of a collection of components and is smart enough to replace the humans
working in a designed area. Soon aer Capek’s novel was released, the concept of robots
was illustrated in theaters and movies, stimulating the public’s interest in the emergence of
robots and their development and encouraging further research into this eld.
Nevertheless, in the real world, it is not easy to create a smart robot as envisioned in
Karel Capek’s novel. A smart robot is an entity that can operate autonomously and com-
bines technological breakthroughs in machinery, automation, electrical, optics, electron-
ics, soware, communication, safety mechanisms, and creative design. It is a product that
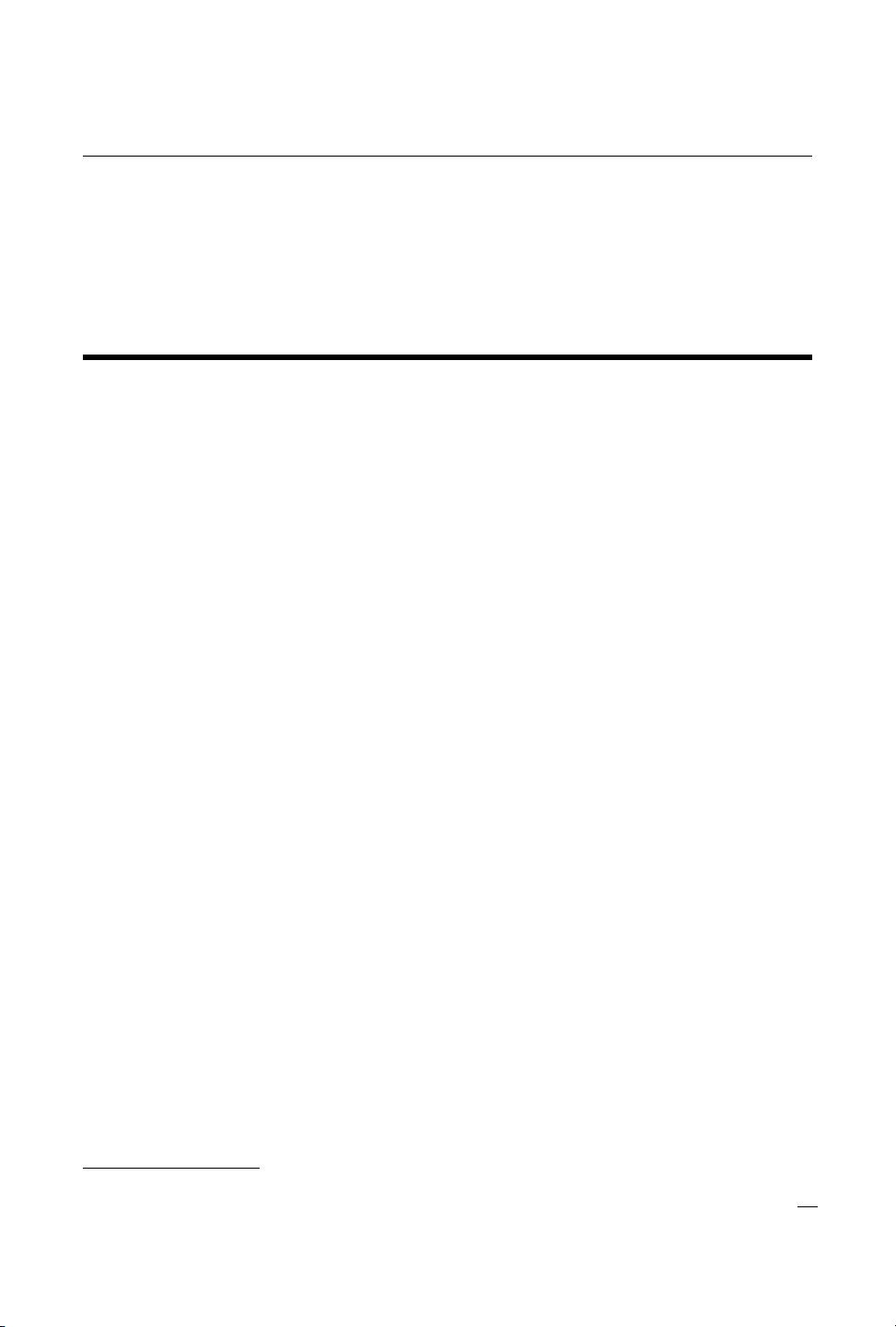
merges high-end technologies and has a high commercial value. As illustrated in Figure 1.1,
knowledge about robot development crosses several domains and can be broadly classied
into four layers, namely hardware, soware, applications, and user layers.
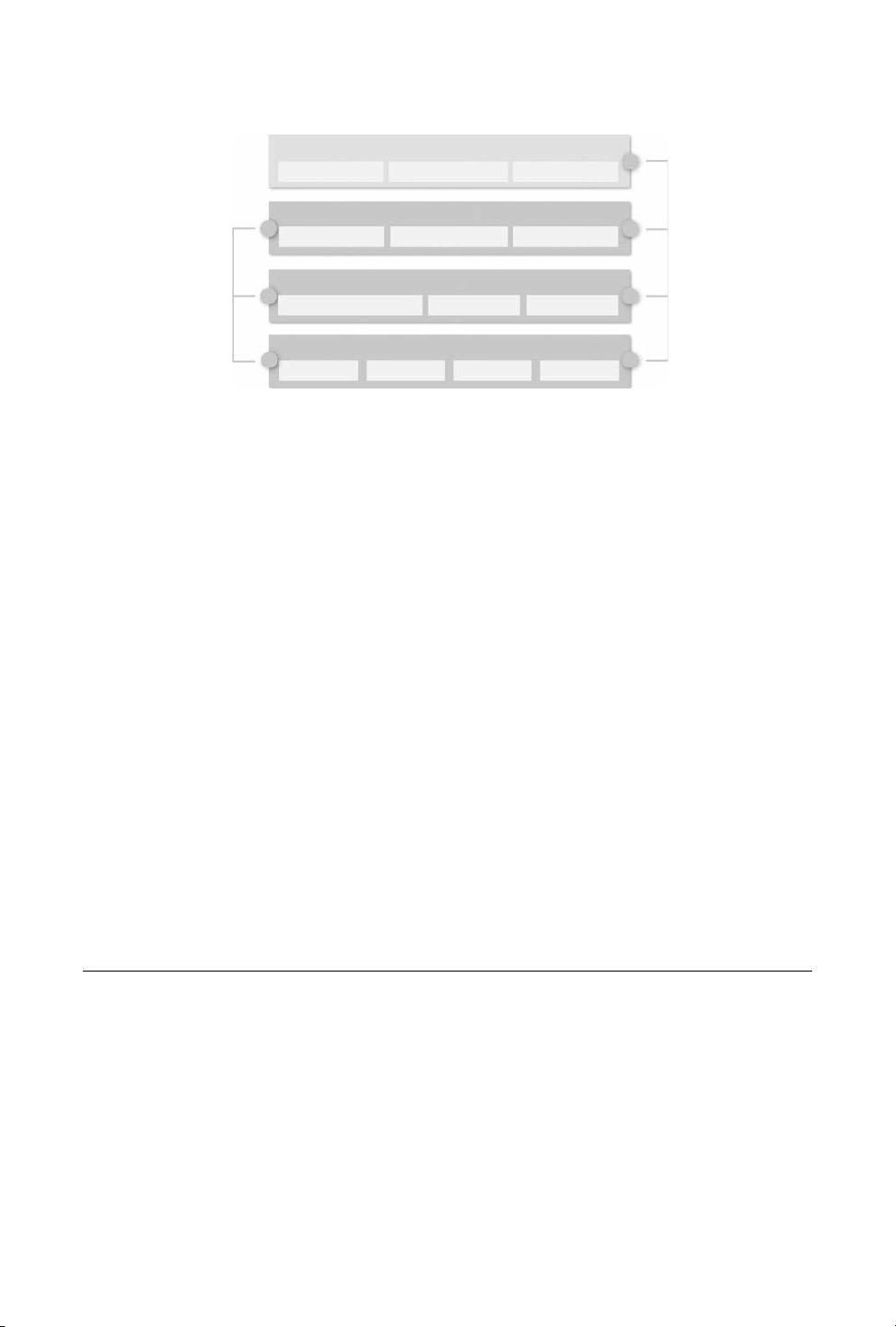
1. Hardware layer: is determines the hardware capabilities of the robot, which is
analogous to the bodily functions of a human being. is layer includes the manip-
ulators, sensors, actuators, controllers, and so on. Hardware construction requires
expert knowledge about machinery, automation, electrics, optics, and electronics.
2. Soware layer: is determines the responsiveness of the robot, which is analogous
to the senses and reactions of a human being. e categories in this layer include sub-
jects such as concurrent programming and the robot’s perception and simulations. It
requires soware and communication protocols for construction.
*
Capek, Karel (2001). R.U.R., translated by Paul Selver and Nigel Playfair, Dover Publications, p. 49.

剩余287页未读,继续阅读
118 浏览量
445 浏览量
131 浏览量
2021-09-29 上传
2021-07-08 上传
2008-10-10 上传
2021-05-03 上传
2021-04-28 上传
113 浏览量

tmsmo456
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现自定义尺寸条形码和二维码生成工具
- Bootthink多系统引导程序成功安装经验分享
- 朗读女中文朗读器,智能语音朗读体验
- Jupyter Notebook项目培训教程
- JDK8无限强度权限策略文件8下载指南
- Navicat for MySQL工具压缩包介绍
- Spring和Quartz集成教程:定时任务解决方案
- 2013百度百科史记全屏效果的fullPage实现
- MATLAB开发电磁转矩电机瞬态响应研究
- 安卓系统短信问题解决方案:使用BlurEmailEngine修复
- 不同版本Android系统的Xposed框架安装指南
- JavaScript项目实验:模拟骰子与颜色转换器
- 封装高效滑动Tab动画技术解析
- 粒子群优化算法在Matlab中的开发与应用
- 网页图书翻页效果实现与turnjs4插件应用
- JSW: 一种新型的JavaScript语法,支持Coffeescript风格
