Yolov5源码深度解析:训练细节与疑问探讨
"这篇内容主要涉及深度学习领域的YOLOv5模型的源码阅读与理解,包括代码结构、功能、细节分析以及功能验证。标签包括YOLOv5、深度学习、计算机视觉和源码,内容涵盖了YOLOv5的训练参数、损失函数、正例样本分配、anchor的概念及计算,以及模型的内部工作原理。"
在YOLOv5的源码阅读中,我们首先要理解训练过程中的关键参数。`nc`代表类别数,它与配置文件`mask.yaml`中的`names`字段相对应,定义了目标检测任务中需要识别的类别总数。`no`则表示每个anchor的输出维度,包含4个边界框坐标和1个对象存在概率(objectness score)。`nl`指定了检测所用的网络层数,通常在使用FPN(Feature Pyramid Network)时为3层。`na`表示每层的anchor数量。
损失函数的计算是训练过程的核心部分。YOLOv5采用了focal loss,它同时应用于类别分类(二分类:前景/背景)和物体objectness的预测(多分类:对应数据集中类别数量)。`BCEcls`指的是针对类别的二元交叉熵损失,而`BCEobj`则是针对objectness的二元交叉熵损失。
在正例样本的分配和anchor的选择上,正例样本通常是与gt box(ground truth box)匹配度最高的anchor。anchor是由预先设定的尺寸组合,通常通过K-means聚类等方法根据数据集的特点来确定。在YOLOv5中,`anchors`变量包含了这些尺寸信息,如`na=len(anchors[0])//23`表示取每行的一半作为anchor的数量,这是因为每行的anchor设置包含宽和高两个值。
`anchor_grid`是相对于特征图的网格,用于定位每个anchor的位置。`register_buffer`函数用于将参数保存到模型的内在状态,便于模型的保存和加载。`stride`数组定义了FPN各层的下采样比例,`anchor`的尺度会根据`stride`调整,而`anchor_grid`的尺度保持不变。
在模型的`Detect`模块中,输入的特征图尺寸反映了网络的不同分辨率级别,如`(1,128,32,32)`、`(1,256,16,16)`、`(1,512,8,8)`,这些特征图将结合anchor信息进行目标检测。不同层的特征图具有不同的感受野,能捕捉不同尺度的目标。
深入理解YOLOv5的源码不仅需要掌握深度学习的基本概念,还需要对目标检测框架、损失函数设计、特征金字塔网络以及anchor机制有深入的理解。通过这样的源码阅读和解读,有助于开发者优化模型性能,适应特定的计算机视觉任务。
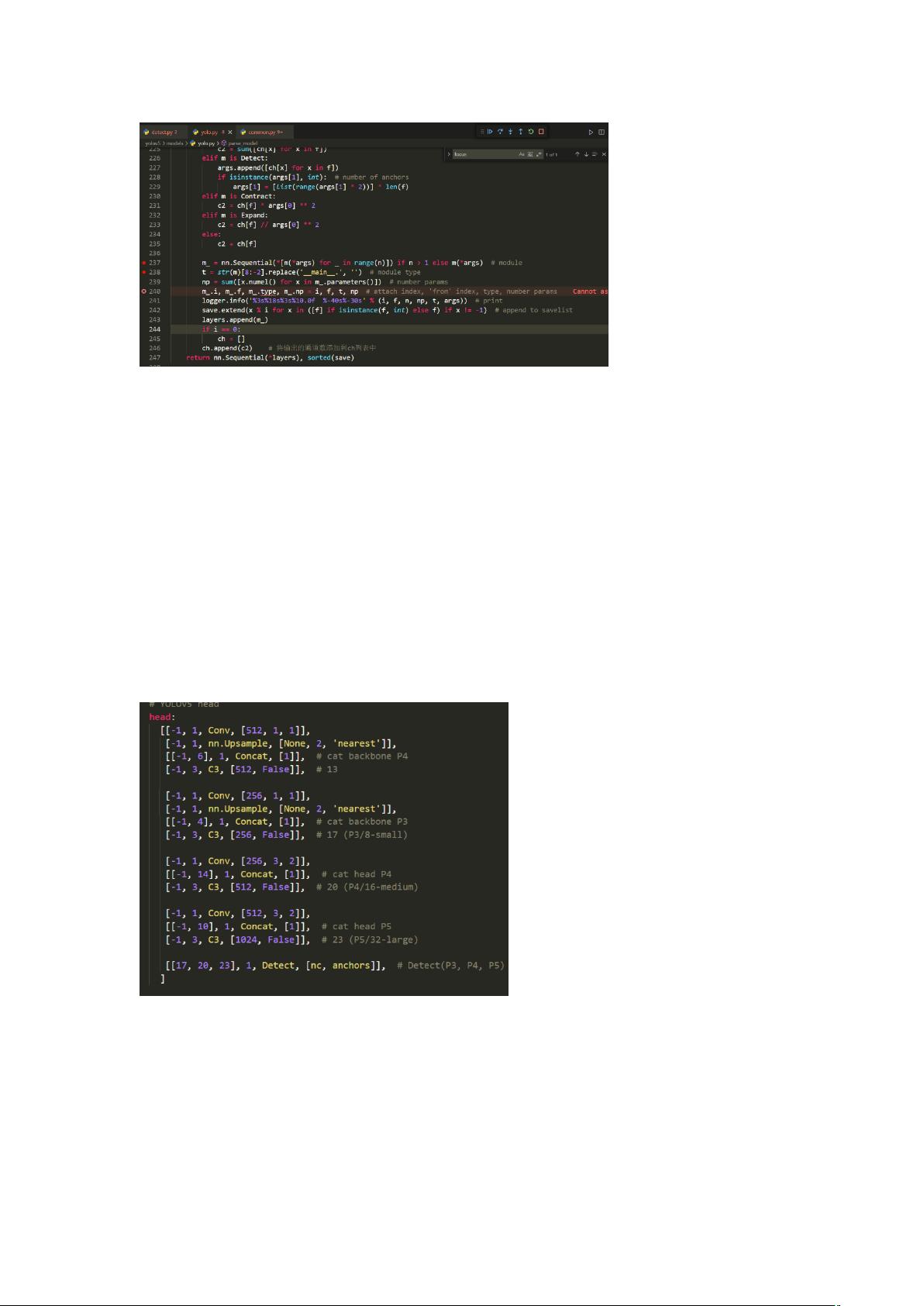
在每个模型生成完后,会将当前模块的输出维度添加到 ch 列表中,因此通过 ch[-1]可以读
取上一层的输出维度,作为当前模块的输入维度,该 ch 起到传递输出维度的作用
而 layers 中保存了所有的模块本身,最后使用 nn.Sequential 将所有的模块串起来
在模型解析函数中
c1:是当前模块输入的通道数
c2:是当前模块输出的通道数,通道数对应了模型宽度方向上的缩放,每个模块的输出必须
是 32 的整数倍
Q:save 中保存了非-1 的层,x%i 会得到多少?
[17,20,23]是要输入的层号,-1 表示使用上层的输出
从参数上看,x 的值比 i 小,因此最后仍然是 x 本身,那取余的意义是什么?
剩余17页未读,继续阅读
2022-04-07 上传
2023-12-26 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情


齐齐大魔王
- 粉丝: 23
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- 参考资料-基于ptr2000无线model的单片机之间无线通信的实现.zip
- 3WebDB-开源
- Unity脚本:基本的Unity游戏脚本
- fera:算法,数据结构和支持板条箱的集合
- C++编程100例源代码.rar
- RankTop.lunre7nhzg.gai4OMq
- mongodb-easy-backup:轻松将MongoDB Atlas数据库备份到您的计算机
- ywcket.rar_Windows编程_C#_
- e-commerce-organico
- kdtree:具有文件系统二进制索引PHP KD Tree实现
- scrcpy相关.7z
- GameLauncher解决方案
- CostOne.du8wx5uggr.gasmdxj
- AndroidListViewWithFixedRows:自定义Android ListView,您可以在其中设置要显示的最大行数
- Learn Japanese through Anime-crx插件
- 为Prometheus.io导出Django监控指标-Python开发
