"深度学习BEV感知算法概述及应用: 数据形式、方法分类和剖析"
下载需积分: 2 | PPTX格式 | 11.08MB |
更新于2023-12-31
| 113 浏览量 | 举报
深度学习BEV感知算法概述
本文将对深度学习BEV感知算法进行详细概述。BEV感知是一种建立在众多子任务上的概念,包括分类、检测、分割等等。BEV指的是Bird's-Eye-View,即鸟瞰图或俯视图,它能够通过将三维世界映射到二维平面上的方式,有效地减小尺度变化和遮挡问题。
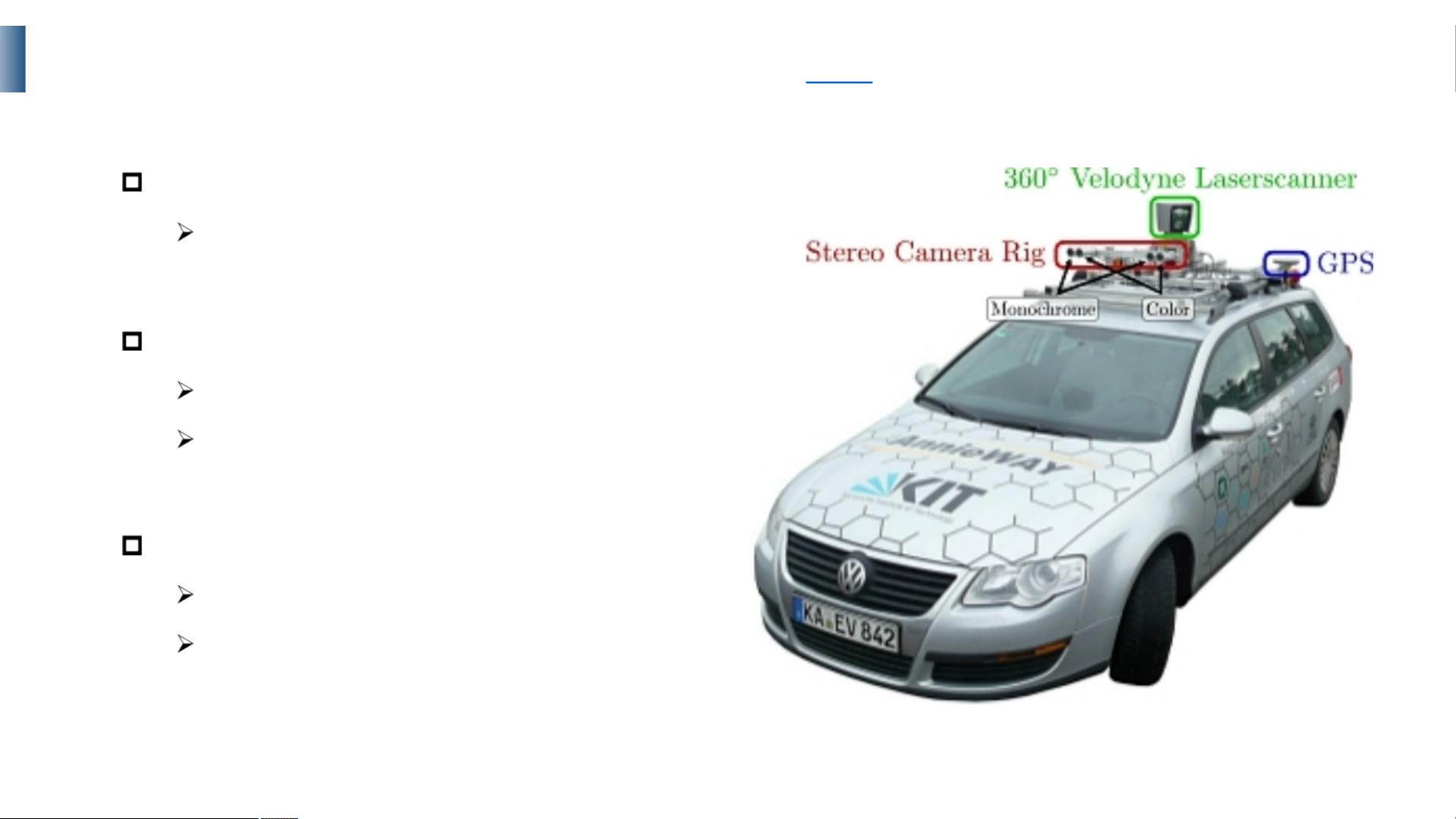
BEV感知算法的输入包括毫米波雷达、激光雷达点云、相机图像等。不同的输入方式会导致BEV感知算法的进一步划分。BEV感知的目标是利用这些输入数据,通过算法来理解和感知不同的场景,比如分类、检测和分割。
BEV感知算法的应用非常广泛。它可以应用于自动驾驶领域,帮助车辆进行环境感知,检测障碍物和行人等,从而实现智能驾驶。此外,在交通管理、安防监控等领域也可以应用BEV感知算法,用于车辆追踪、行人检测等任务。
BEV感知算法的优劣一直是研究的重点。不同算法的优劣取决于其准确度、鲁棒性和实时性等方面。通过深度学习技术的发展,新的BEV感知算法不断涌现,取得了不错的效果。
BEV感知算法的基础模块包括数据预处理、特征提取和目标识别等。数据预处理模块主要用于对输入数据进行校正和降噪处理。特征提取模块则用于从输入数据中提取有用的特征信息。目标识别模块则通过深度学习网络对图像中的目标进行检测和分类。
BEV感知算法在数据形式上有一些特点。图像是由相机生成的,在BEV感知中起到重要作用。激光雷达可以提供高精度的点云数据,对于障碍物检测非常重要。毫米波雷达则能够提供更远距离的障碍物探测能力。这些数据形式的组合能够提供全面的环境感知能力。
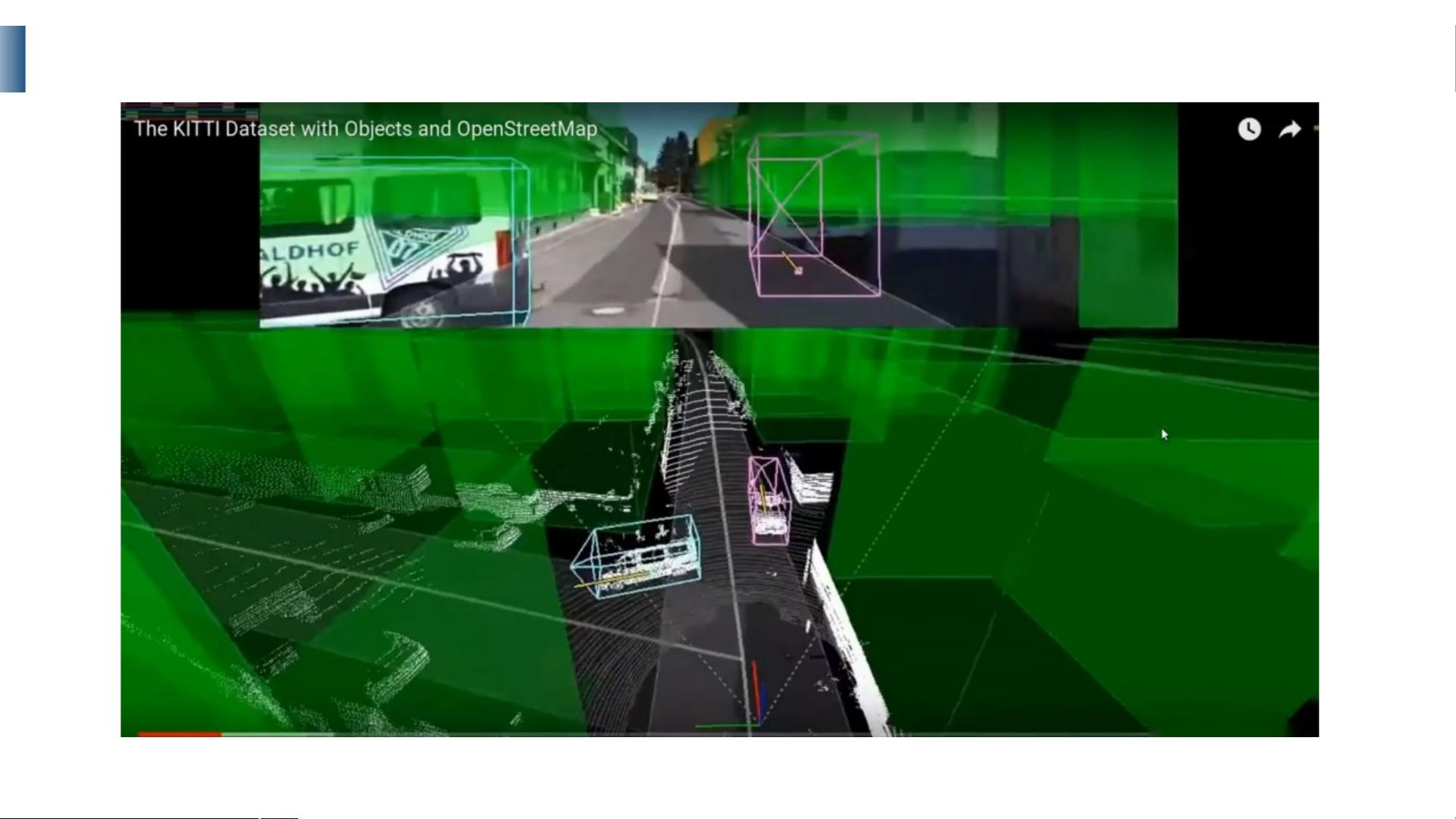
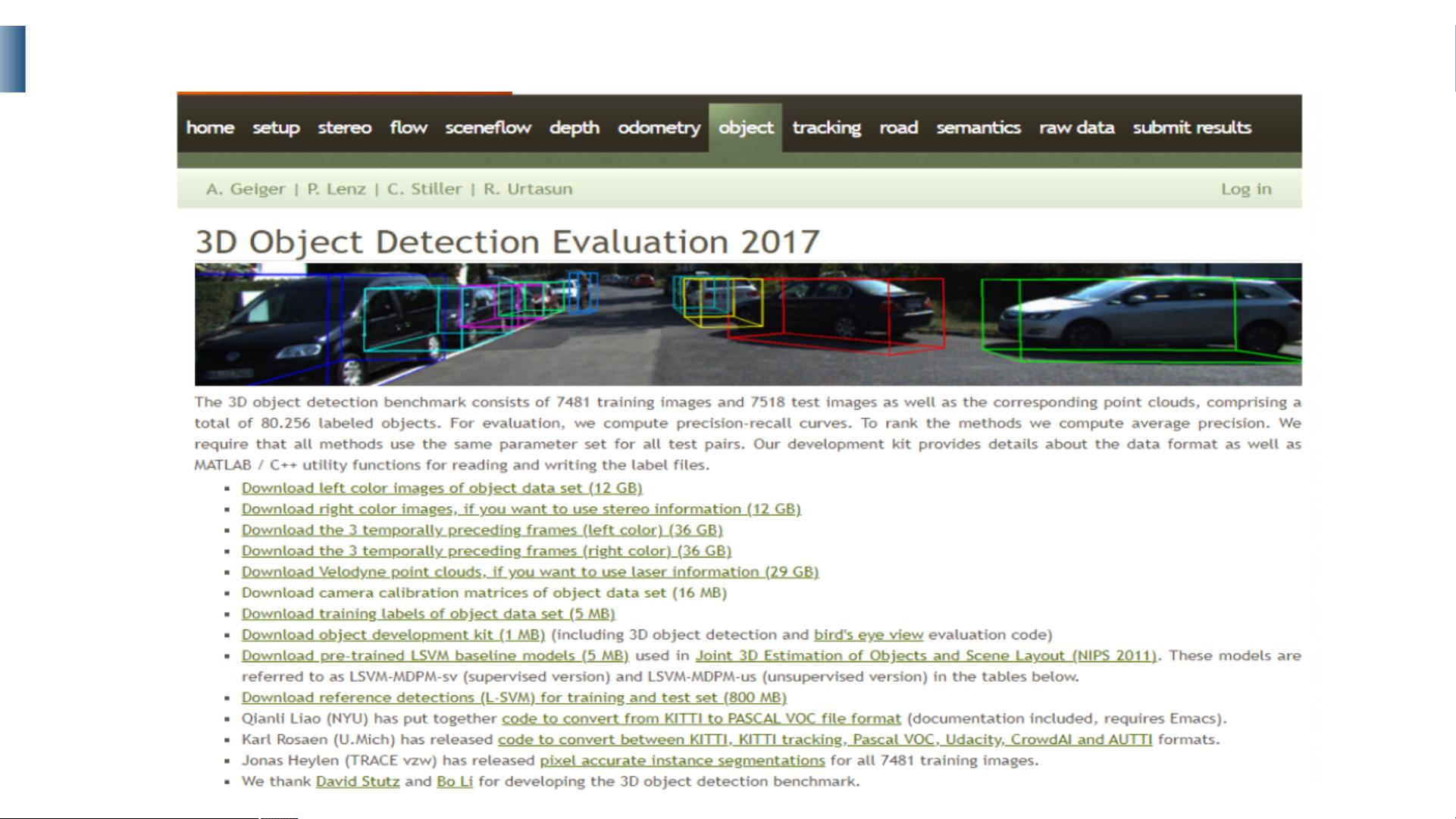
此外,BEV感知算法的发展还离不开开源数据集的支持。开源数据集可以为算法的训练和评估提供标注数据,帮助研究人员更好地理解和改进算法。目前已有一些针对BEV感知的开源数据集,比如KITTI、nuScenes等。
总之,深度学习BEV感知算法是一种通过将三维世界映射到二维平面上的方式,来实现环境感知的方法。它通过应用不同的输入数据和算法模块,能够准确地检测和分类图像中的目标。随着深度学习技术的不断发展,BEV感知算法的应用前景将更加广阔。
相关推荐




AI松子666
- 粉丝: 2051
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现自定义尺寸条形码和二维码生成工具
- Bootthink多系统引导程序成功安装经验分享
- 朗读女中文朗读器,智能语音朗读体验
- Jupyter Notebook项目培训教程
- JDK8无限强度权限策略文件8下载指南
- Navicat for MySQL工具压缩包介绍
- Spring和Quartz集成教程:定时任务解决方案
- 2013百度百科史记全屏效果的fullPage实现
- MATLAB开发电磁转矩电机瞬态响应研究
- 安卓系统短信问题解决方案:使用BlurEmailEngine修复
- 不同版本Android系统的Xposed框架安装指南
- JavaScript项目实验:模拟骰子与颜色转换器
- 封装高效滑动Tab动画技术解析
- 粒子群优化算法在Matlab中的开发与应用
- 网页图书翻页效果实现与turnjs4插件应用
- JSW: 一种新型的JavaScript语法,支持Coffeescript风格
