使用Kinect™传感器的视觉特征空间不确定性模型
需积分: 9 57 浏览量
更新于2024-07-27
收藏 2.93MB PDF 举报
"这篇研究文章提出了一种使用Kinect™传感器对视觉特征的空间测量的数学不确定性模型。该模型能够对Kinect™传感器作为三维感知传感器的使用进行定性和定量分析。通过建立两个空间(差异图像空间和真实笛卡尔空间)之间映射函数的传播关系,研究人员得出了测量误差协方差矩阵的数学模型,该模型代表了从Kinect™传感器获得的视觉特征在空间位置上的不确定性。为了构建视觉特征的空间不确定性定量模型,他们利用收集的视觉特征数据估计了差异图像空间中的协方差矩阵,并结合校准的传感器参数应用到提出的数学模型中。通过比较空间协方差矩阵的不确定性椭圆和散射匹配视觉特征的分布,验证了这个空间不确定性模型。预计该模型及其分析将在各种Kinect™传感器应用中发挥作用。"
文章来源于"Sensors"期刊的一篇研究,由Jae-Han Park、Yong-Deuk Shin、Ji-Hun Bae和Moon-Hong Baeg等人撰写,属于Robot Convergence R&D Group, Korea Institute of Industrial Technology (KITECH)。文章发表于2012年6月26日,探讨了使用微软的Kinect™传感器进行三维空间中视觉特征测量时的不确定性问题。
文章的核心贡献是建立了一个数学模型,用于描述和量化由Kinect™传感器获取的视觉特征的空间不确定性。这种不确定性主要源于从差异图像空间到实际笛卡尔空间转换过程中的误差传播。通过估计差异图像空间中的测量误差协方差矩阵,并结合传感器的校准参数,可以计算出空间不确定性信息。实验结果通过比较不确定性椭圆与实际匹配视觉特征的分布进行了验证,证明了模型的有效性。
这一研究成果对于依赖Kinect™传感器的领域,如机器人导航、三维重建、环境感知等具有重要意义,因为它可以帮助理解和减少由传感器测量不确定性带来的误差,从而提高应用的精度和可靠性。
Sensors 2012, 12 8644
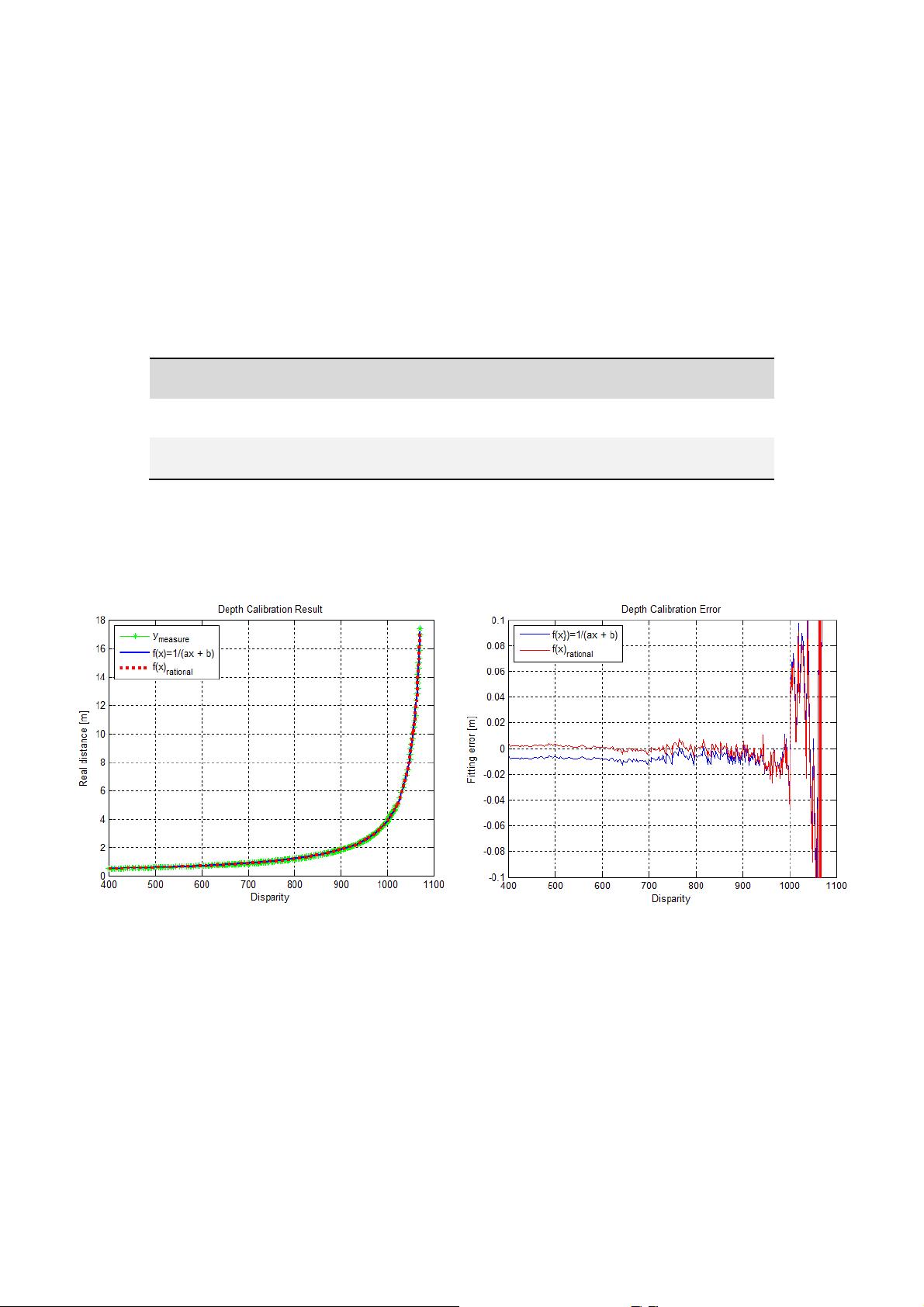
results for the depth calibration function in Equations (1) and (2), respectively. In Figure 3(a), both
calibration functions seemed to fit the measurement data well. However, as seen in Figure 3(b), the
residual error of the rational function model appeared to be nearer to the X-axis than the model
represented by Equation (1). This implies that the rational function model with a higher degree-of-
freedom of the optimization variables can be fitted more precisely in the depth calibration problem.
The norm of residual vector for Equation (1) and the rational function were computed to be 1.045495
and 1.034060, respectively.
Table 1. Depth calibration parameters (4th-order rational function model).
Polynomial
order
Const. (d
0
) 1st (d
1
) 2nd (d
2
) 3rd (d
3
) 4th (d
4
)
Numerator
P(d)
452.705 –611.068 255.254 –7.295 7.346
Denominator
Q(d)
–326.149 588.446 –548.754 340.178 –47.175
Figure 3. Depth calibration results. (a) Fitting results (measurement data, Equation (1)
model, fourth-order rational function model); (b) Residual (fitting error) results (Equation (1)
model, fourth-order rational function model).
(a) (b)
After performing depth calibration, the disparity image data can be transformed into the actual
distance information by the depth calibration function. Using this actual distance information, the 3D
spatial position information can be reconstructed with the pin-hole camera projection model. Equation
(3) shows the mapping relationship between the disparity image space data u = [u v d]
T
and the spatial
position information x = [x y z]
T
in the Cartesian space. u and v are the horizontal and vertical
coordinates, respectively, of the disparity image, and d is the disparity data, expressed as an
integer from 0 to 2,047. f(d) is the actual distance information that is calculated by the depth
calibration function:
剩余22页未读,继续阅读
2014-03-21 上传
2014-01-28 上传
2021-05-11 上传
2019-10-20 上传
2021-02-07 上传
2021-02-11 上传
2021-02-10 上传
2021-02-07 上传

huanfei1988
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++ Qt影院票务系统源码发布,代码稳定,高分毕业设计首选
- 纯CSS3实现逼真火焰手提灯动画效果
- Java编程基础课后练习答案解析
- typescript-atomizer: Atom 插件实现 TypeScript 语言与工具支持
- 51单片机项目源码分享:课程设计与毕设实践
- Qt画图程序实战:多文档与单文档示例解析
- 全屏H5圆圈缩放矩阵动画背景特效实现
- C#实现的手机触摸板服务端应用
- 数据结构与算法学习资源压缩包介绍
- stream-notifier: 简化Node.js流错误与成功通知方案
- 网页表格选择导出Excel的jQuery实例教程
- Prj19购物车系统项目压缩包解析
- 数据结构与算法学习实践指南
- Qt5实现A*寻路算法:结合C++和GUI
- terser-brunch:现代JavaScript文件压缩工具
- 掌握Power BI导出明细数据的操作指南
