高维数据可视化:t-SNE算法解析与应用
下载需积分: 0 | PDF格式 | 997KB |
更新于2024-08-05
| 74 浏览量 | 举报
"这篇文档介绍了高维数据可视化的t-SNE(t-distributed Stochastic Neighbor Embedding)算法,该算法主要用于高维数据的非线性降维,以便在二维或三维空间中进行可视化。t-SNE算法由PCA(主成分分析)发展而来,但能处理复杂的非线性关系。文章主要分为两部分,首先解释了t-SNE的基本原理,包括如何在高维和低维空间中构建概率分布,然后讨论了目标函数的优化,特别是困惑度的概念在寻找最佳参数中的作用。"
t-SNE算法是一种强大的工具,尤其适用于数据探索和可视化。当数据集具有大量特征并且特征之间可能存在复杂的非线性关系时,t-SNE通过非线性映射将高维数据降维到低维空间,保持数据的局部结构,从而使得数据的可视化变得更加直观。
算法的核心在于两个阶段:首先,在高维空间中,根据数据点之间的相似度构建一个概率分布,相似的数据点被赋予更高的概率。这一步通常通过计算数据点之间的条件概率来实现,该概率正比于它们的相似度。其次,算法尝试在低维空间中重建这个概率分布,目标是使高维和低维空间中的概率分布尽可能接近。
t-SNE采用的相似度度量是基于条件概率,该概率由高维空间中的欧氏距离转化而来。在低维空间中,同样使用条件概率来描述数据点之间的相似性。通过最小化高维和低维空间概率分布的Kullback-Leibler散度,可以优化降维过程,保持局部结构。
损失函数的设计使得t-SNE更加关注局部结构,对于高维空间中相近的数据点,如果在低维空间中被拉远,会受到较大的惩罚。相反,高维空间中远离的数据点在低维空间中靠近,则受到较小的惩罚。这种机制有助于保持数据点的局部邻接关系。
困惑度是t-SNE算法中一个关键的概念,它是衡量概率分布质量的一个指标,等价于高维空间中数据点的有效近邻数量。在优化过程中,通过二分搜索确定一个合适的困惑度值,以平衡保持局部结构和整体结构的难度。困惑度的选择对结果的可视化效果有很大影响,一个适中的困惑度值可以确保数据的局部细节在降维后得以保留。
t-SNE算法通过非线性映射和概率分布的匹配,有效地解决了高维数据的可视化问题,特别适合于发现和展示高维数据中的局部结构和模式。在实际应用中,结合困惑度的优化,可以生成揭示数据内在关系的高质量二维或三维投影图。
杨航锋
高维数据可视化之 算法
假设你有一个包含数百个特征的数据集,却对该数据所属领域几乎没有什么了解,并且你
需要去探索数据中存在的隐模式。那可谓是数无形时少直觉,根本无从下手,当数据各特征间
存在高度的线性相关,这时你可能首先会想到使用 对数据进行降维处理,但是 是
一种线性算法,它不能解释特征之间的复杂多项式关系,而 (t distributed stochastic
neighbor embedding)是一种用于挖掘高维数据的非线性降维算法,它能够将多维数据映射到
二维或三维空间中,因此 非常适用于高维数据的可视化操作。 是由 发
展而来,因此本文将先介绍 的基本原理,之后再扩展到 。
1 基本原理
是通过仿射变换将数据点映射到相应概率分布上,主要包括下面两个步骤:
1. 通过在高维空间中构建数据点之间的概率分布 ,使得相似的数据点有更高的概率被选
择,而不相似的数据点有较低的概率被选择;
2. 然后在低维空间里重构这些点的概率分布 ,使得这两个概率分布尽可能相似。
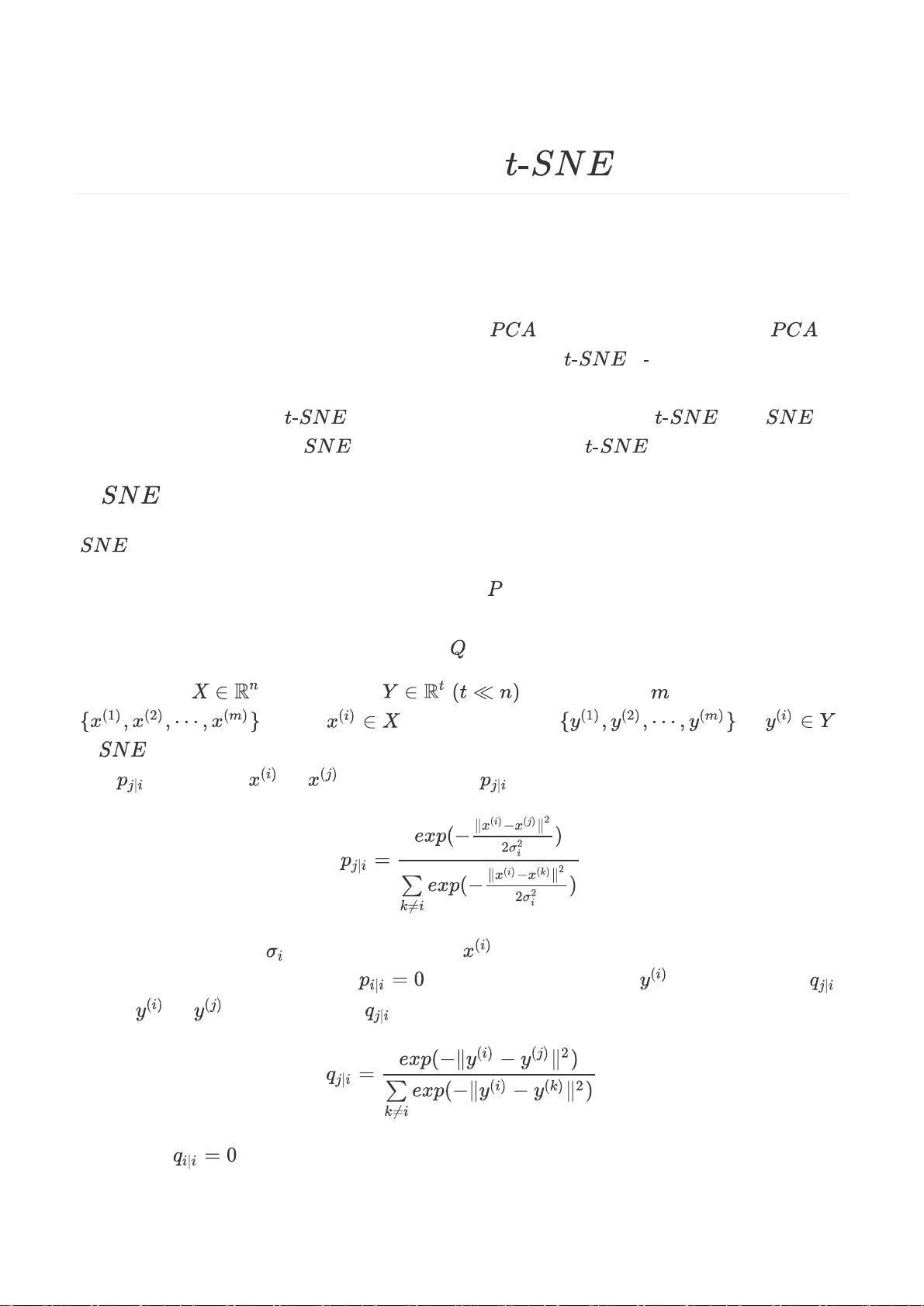
令输入空间是 ,输出空间为 。不妨假设含有 个样本数据
,其中 ,降维后的数据为 ,
。 是先将欧几里得距离转化为条件概率来表达点与点之间的相似度,即首先是计算条件
概率 ,其正比于 和 之间的相似度, 的计算公式为:
在这里引入了一个参数 ,对于不同的数据点 取值亦不相同,因为我们关注的是不同数
据点两两之间的相似度,故可设置 。对于低维度下的数据点 ,通过条件概率
来刻画 与 之间的相似度, 的计算公式为:
同理,设置 。
下载后可阅读完整内容,剩余5页未读,立即下载
相关推荐



whph
- 粉丝: 28
 我的内容管理
展开
我的内容管理
展开







最新资源
- Subclipse 1.8.2版:Eclipse IDE的Subversion插件下载
- Spring框架整合SpringMVC与Hibernate源码分享
- 掌握Excel编程与数据库连接的高级技巧
- Ubuntu实用脚本合集:提升系统管理效率
- RxJava封装OkHttp网络请求库的Android开发实践
- 《C语言精彩编程百例》:学习C语言必备的PDF书籍与源代码
- ASP MVC 3 实例:打造留言簿教程
- ENC28J60网络模块的spi接口编程及代码实现
- PHP实现搜索引擎技术详解
- 快速香草包装技术:速度更快的新突破
- Apk2Java V1.1: 全自动Android反编译及格式化工具
- Three.js基础与3D场景交互优化教程
- Windows7.0.29免安装Tomcat服务器快速部署指南
- NYPL表情符号机器人:基于Twitter的图像互动工具
- VB自动出题题库系统源码及多技术项目资源
- AndroidHttp网络开发工具包的使用与优势
