Arduino循迹小车制作教程:从元件到编程详解
需积分: 5 132 浏览量
更新于2024-08-04
13
收藏 1.06MB DOCX 举报
本资源是一份详细的Arduino循迹小车保姆级教程,旨在帮助初学者制作一款具备智能追踪功能的小车。以下是关键知识点概览:
1. **所需元件**:
- Arduino Nano:作为控制器,Nano因其小巧体积而被选用,主要利用其D3、D5、D6、D9、D10、D11引脚进行PWM输出,控制电机的转动。
- L298N电机驱动模块:负责连接直流减速电机,通过ENA、IN1、IN2、IN3、IN4和ENB引脚进行电机的启停和方向控制。
- 直流减速电机和万向轮:提供小车的移动动力,减速电机确保运动平稳,万向轮则增加灵活性。
- 亚克力板:作为小车主体材料,保护电路板和传感器。
- 轮胎两个:用于减震并降低摩擦力。
- TCRT5000寻迹传感器四个:用于识别路径,通过A0、VCC和GND与Arduino板连接。
2. **元器件详解**:
- Arduino Nano的GND、3v3和5v引脚用于电源连接;曲线引脚D3、D5、D6、D9、D10、D11用于输出模拟信号。
- L298N的使能引脚ENA和IN1/IN2/IN3/IN4引脚用于控制电机的工作状态,ENA是总开关,IN1/IN2对应具体的电机驱动信号。
- 寻迹传感器的A0脚连接到Arduino的A0、A1、A2、A3,VCC和GND用于供电。
3. **连线说明**:
- 寻迹传感器的VCC和GND分别连接到Arduino的5V和GND,A0分别连接到对应的A0-A3引脚。
- L298N的ENA连接到Arduino的12脚,OUT1和OUT2连接到电机的上下两端,但连接顺序根据实际设计和程序编写的指示调整。
4. **程序代码**:
- 在编写程序前,需确保开发板设置为Arduino Nano,处理器选择ATmega328P(OldBootloader)。
- 程序会控制传感器读取,依据接收到的数据调整电机驱动,实现小车沿轨迹跟踪。
这份教程详细地介绍了从所需元件的选择到电路连接,再到编写代码的全过程,适合有一定基础的电子爱好者进一步学习和实践Arduino编程。通过这个项目,你可以了解如何使用Arduino来控制硬件设备,实现简单的机器人功能。
一,所需元件
arduino nano 一个(Uno 太大,所以选择了体积较小的 Nano)
L298N 电机驱动模块一个
直流减速电机两个
万向轮一个
亚克力板
轮胎两个
TCRT5000 寻迹传感器四个
(
速成可直接跳到三,连线部分
)
二,元器件的详细介绍
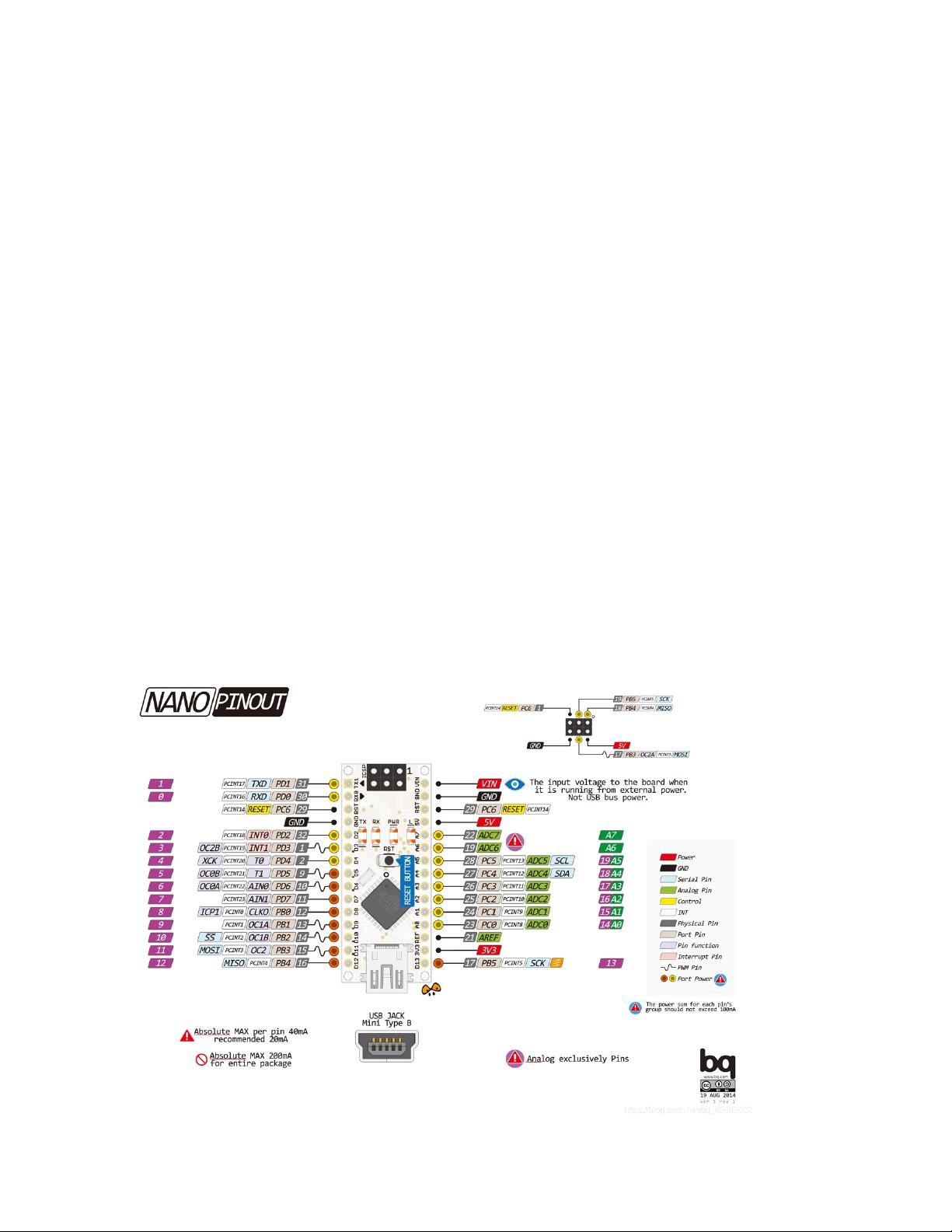
(1)arduino nano
下面看一张 Nano 的图,比较生涩难懂,没关系,我也没搞懂。在本项目中只需要大家知
道 GDN(Ground)是接地的,3v3 和 5v 是输出电压的(给 Nano 板通电及能用)。图中曲线
的引脚(D3,D5,D6,D9,D10,D11)可进行 PWM 输出。(通俗的讲:这几个引脚可以输出低
电压到高电压中间的任何一个值,而其他的引脚要么输出高电压,要么输出低电压)
下载后可阅读完整内容,剩余7页未读,立即下载
2020-05-28 上传
2024-04-12 上传
2022-06-25 上传
2022-06-28 上传
2022-06-28 上传
2022-11-29 上传
2022-06-25 上传
2023-02-22 上传
2022-07-10 上传

CodingLife99
- 粉丝: 1204
- 资源: 456
 我的内容管理
展开
我的内容管理
展开







最新资源
- Haskell编写的C-Minus编译器针对TM架构实现
- 水电模拟工具HydroElectric开发使用Matlab
- Vue与antd结合的后台管理系统分模块打包技术解析
- 微信小游戏开发新框架:SFramework_LayaAir
- AFO算法与GA/PSO在多式联运路径优化中的应用研究
- MapleLeaflet:Ruby中构建Leaflet.js地图的简易工具
- FontForge安装包下载指南
- 个人博客系统开发:设计、安全与管理功能解析
- SmartWiki-AmazeUI风格:自定义Markdown Wiki系统
- USB虚拟串口驱动助力刻字机高效运行
- 加拿大早期种子投资通用条款清单详解
- SSM与Layui结合的汽车租赁系统
- 探索混沌与精英引导结合的鲸鱼优化算法
- Scala教程详解:代码实例与实践操作指南
- Rails 4.0+ 资产管道集成 Handlebars.js 实例解析
- Python实现Spark计算矩阵向量的余弦相似度
