基于MSP430与MCP2515的CAN总线智能节点设计实现
需积分: 50 86 浏览量
更新于2024-09-10
2
收藏 490KB PDF 举报
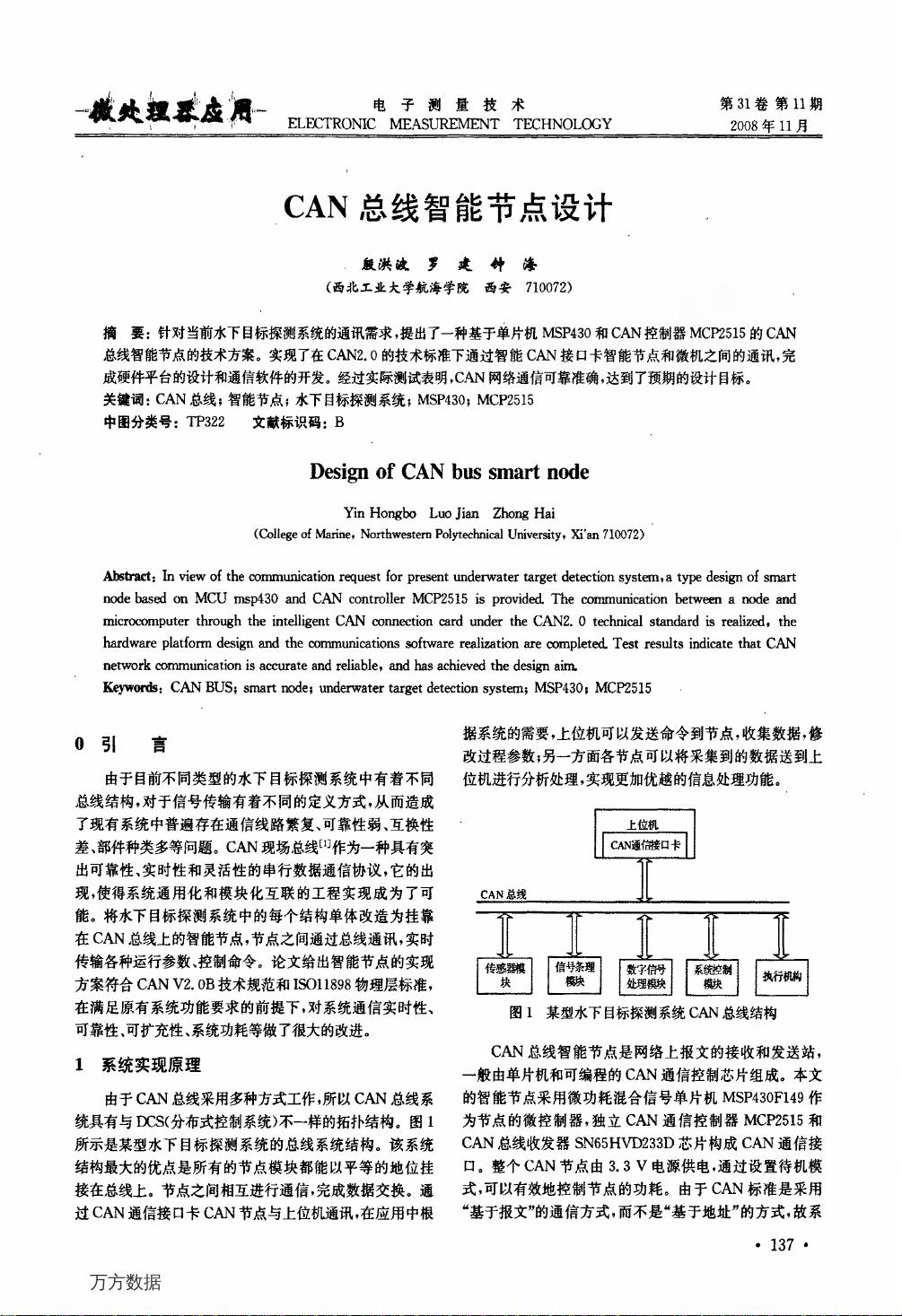
本文主要探讨了CAN总线智能节点在水下目标探测系统中的应用和设计。CAN(Controller Area Network)总线是一种广泛应用于工业自动化、汽车电子等领域的通信协议,以其高可靠性、实时性和低数据速率的特点而备受青睐。文章标题"CAN总线智能节点设计"表明研究的核心内容是围绕如何利用单片机MSP430和CAN控制器MCP2515构建一个能够在CAN 2.0标准下高效工作的智能节点。
MSP430是一种低功耗的嵌入式微控制器,适用于电池供电设备,而MCP2515则是一款CAN控制器,它负责管理CAN网络的数据传输,包括发送和接收。通过将这两者结合,智能节点能够实现节点与微机之间的可靠通信,从而满足水下目标探测系统对数据交换的需求。
设计的关键步骤可能包括硬件平台的设计,如选择合适的接口电路,实现CAN控制器与MSP430的连接,并确保信号传输质量。此外,软件层面的工作也非常重要,包括CAN驱动程序的开发、通信协议栈的实现以及错误检测和恢复机制。通过智能接口卡,可以简化节点与微处理器之间的数据交互,提高整个系统的效率。
作者提出的设计方案旨在优化水下环境中的通信性能,减少误报和数据丢失,这对于需要在复杂水下环境中实时监测和定位目标的系统来说,具有显著的实际意义。实际测试结果显示,所设计的CAN总线智能节点达到了预期的性能指标,证明了其在水下目标探测系统中的应用是可行且有效的。
本文深入解析了CAN总线智能节点的设计原理,涵盖了硬件选型、接口设计、通信协议实现及测试验证等多个环节,对于理解CAN技术在特定应用场景中的具体运用提供了有价值的信息。对于从事相关领域研究或工程实践的专业人士来说,这篇文章提供了实用的技术参考和实践经验。
万方数据
下载后可阅读完整内容,剩余5页未读,立即下载
2110 浏览量
2020-10-22 上传
2020-10-21 上传
159 浏览量
2020-10-19 上传
2021-02-03 上传
2021-02-01 上传
2022-04-29 上传

qq_16152129
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







