华南理工研究生自控理论试卷:动态系统分析与控制设计
需积分: 9 25 浏览量
更新于2024-09-15
收藏 161KB PDF 举报
华南理工大学2012年研究生入学考试自动控制理论试卷涵盖了多个方面的控制理论知识,旨在测试考生对于自控基础的理解和应用能力。以下是详细的知识点解析:
一、飞球调速器分析
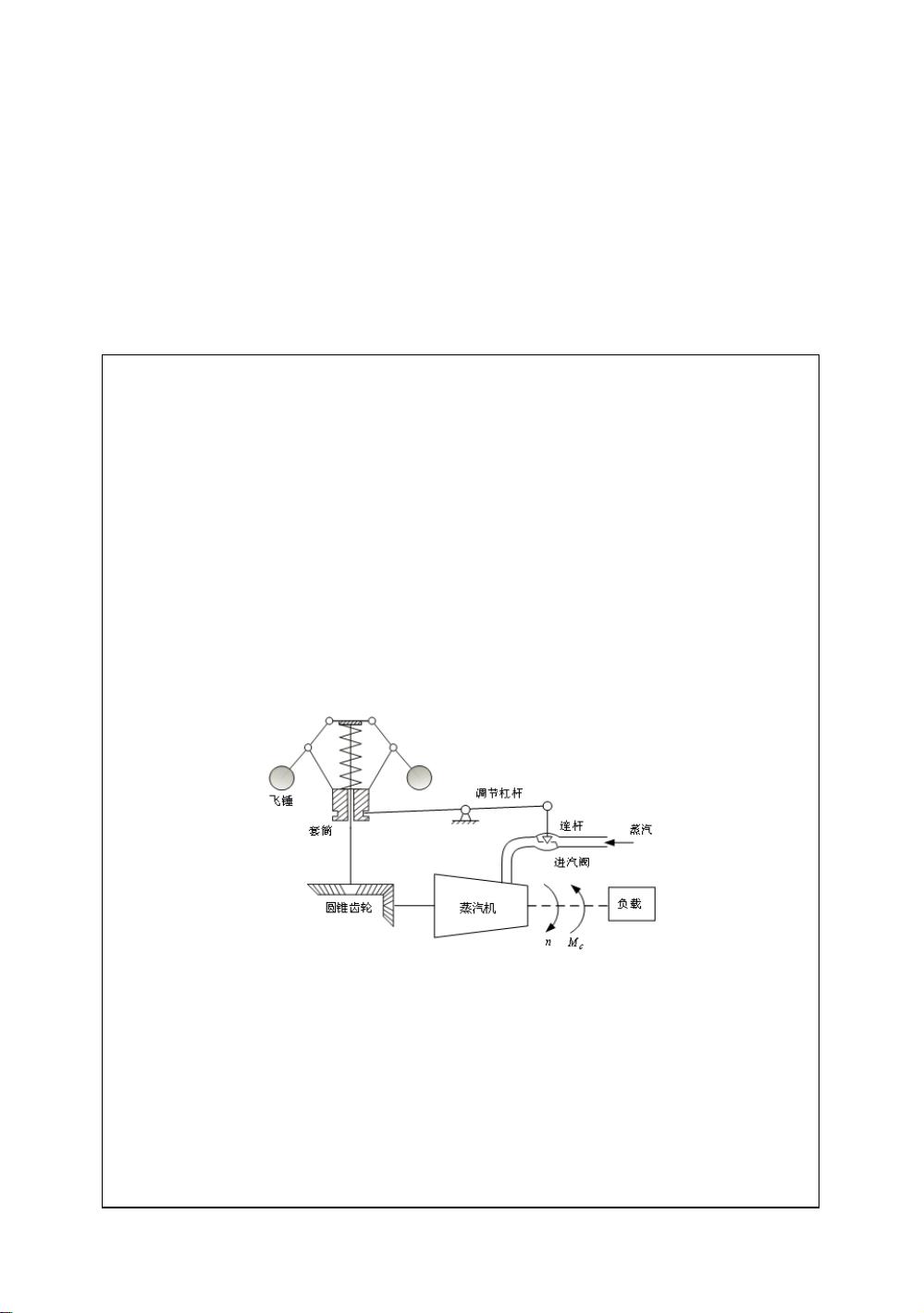
1. **系统功能方块图**:飞球调速器是一种典型的速度反馈控制系统,通过蒸汽机转速的变化驱动连杆上下移动,进而调整输出转速。功能方块图中,主要包括执行器(蒸汽机)、控制器(调节器)、被控对象(飞球)和测量元件(连杆位移)。可能存在干扰,如外部风阻或蒸汽压力波动,通过设计适当的滤波器或PID控制器来削弱这些干扰的影响。
2. **静态误差分析**:由于没有直接测量蒸汽机转速的环节,存在静差,即系统在稳态时不能精确地将输入信号转化为输出。通过在方块图中加入一个积分环节(例如,I(s) = 1/s),可以抵消静态误差,使得输出转速的稳态误差为0。
3. **杆长调整**:调整杠杆支点杆长可能影响连杆的放大系数,从而间接影响系统的静态误差。缩短杆长通常会使放大作用减弱,有助于减小静态误差,但可能会降低系统的快速响应性能。
二、弹簧-质量-阻尼器系统
1. **参数确定**:通过分析图(b)中的振动响应曲线,可以利用运动学和动力学原理解出系统的参数。根据阶跃输入下的响应,通过解析振幅衰减和周期来计算质量m、阻尼系数f和弹性系数k。
2. **根轨迹分析**:根轨迹是研究开环系统稳定性的重要工具。原系统根轨迹草图的绘制需考虑开环传递函数的零点和极点分布,分析其对系统稳定性的影响。当H(s)变为s+1时,系统可能会从不稳定变为稳定,或者稳定性边界发生改变。
三、负反馈控制系统
1. **根轨迹分析**:根轨迹草图展示了系统根在复平面上的分布,包括起点、终点、实轴区域等特征。根轨迹的走向反映了系统动态性能,如增益裕度和相位裕度。通过改变H(s),可能会影响系统的闭环稳定性及性能。
2. **H(s)变化影响**:H(s)的改变会改变系统的开环增益或相位特性,进而影响系统对输入信号的响应速度、抑制噪声的能力以及抗扰动能力。
四、传递函数和裕度计算
1. **开环对数幅频特性**:给出了系统的开环传递函数Gc(s)和干扰D(s)后,可以计算开环增益和相位特性,进而绘制伯德图。幅值裕度和相位裕度是评估系统稳定性和抗干扰能力的关键指标,它们决定了系统对信号变化的响应能力。
总结,这份华南理工大学的自动控制理论试卷涵盖了控制系统的设计、分析、参数确定和性能评价等多个核心知识点,旨在考察学生对自动控制原理、现代控制理论、根轨迹分析以及系统性能分析的深入理解和实践能力。
833
华南理工大学
2012 年攻读硕士学位研究生入学考试试卷
(请在答题纸上做答,试卷上做答无效,试后本卷必须与答题纸一同交回)
科目名称:自控基础综合(含自动控制原理、现代控制理论)
适用专业:系统分析与集成;控制理论与控制工程;检测技术与自动化装置;系统工
程;模式识别与智能系统;交通信息工程及控制;控制工程(专硕)
本卷满分:150 分 共 4 页
第 1 页
一、(24 分)在题一图所示的飞球调速器中,设连杆上下位移变化量与蒸
气机转速变化量成正比,试回答下述问题:
(1) 画出系统功能方块图,结合方块图说明系统的工作原理(要求指出至
少一处可能存在的干扰,系统如何克服干扰的影响,各器件的大致功
能);
(2) 判断该系统输出转速的静态误差是否为 0,并说明原因。试在方块图
中适当位置增加一环节,使得系统稳态误差为 0(仅要求写出该环节
的传递函数,不需要给出具体实现方案);
(3) 调整杠杆支点两端的杆长,能否减小输出转速的静态误差?若可以,
试简单说明调整的方法,并指出该方法对系统动态性能的影响。
题一图
二、(10 分)如题二图(a)所示是一个弹簧-质量-阻尼器组成的机械振动系
统,其中,阻尼器产生的阻力与速度成正比。当有 2 牛顿的力 P(阶跃输
入)作用于系统时,系统中的质量 m 作如题二图(b)所示的振动。试根据
这个响应曲线确定 m,f 和 k。(计算的最终结果保留 1 位小数)
下载后可阅读完整内容,剩余3页未读,立即下载
869 浏览量
点击了解资源详情
276 浏览量
2010-09-16 上传
264 浏览量
838 浏览量
2021-11-25 上传

chris_wu2012
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现DataGridView过滤功能的源码分享
- Python开发者必备:VisDrone数据集工具包
- 解决ESXi5.x安装无网络适配器问题的第三方工具使用指南
- GPRS模块串口通讯实现与配置指南
- WinCvs客户端安装使用指南及服务端资源
- PCF8591T AD实验源代码与使用指南
- SwiftForms:Swift实现的表单创建神器
- 精选9+1个网站前台模板下载
- React与BaiduMapNodejs打造上海小区房价信息平台
- 全面解析手机软件测试的实战技巧与方案
- 探索汇编语言:实验三之英文填字游戏解析
- Eclipse VSS插件版本1.6.2发布
- 建站之星去版权补丁介绍与下载
- AAInfographics: Swift语言打造的AAChartKit图表绘制库
- STM32高频电子线路实验完整项目资料下载
- 51单片机实现多功能计算器的原理与代码解析
