倒立摆控制系统分析:根轨迹与频域方法
本文主要探讨了倒立摆的校正方法,包括时域校正、频域校正和反馈矫正,以确保系统的稳定性。文章详细介绍了倒立摆的特性和数学模型,特别是针对直线倒立摆进行了深入分析。
1. 倒立摆的基本概念与特点
- 倒立摆是一种特殊的物理系统,其重心位于支撑点之上,处于不稳定状态。
- 非线性:倒立摆系统是非线性的,需要通过线性化处理进行控制设计。
- 不确定性:模型误差、机械间隙和阻力等因素导致不确定性,可通过减少误差来改善。
- 耦合性:各部件间存在强烈的耦合关系,通常在平衡点附近进行解耦计算。
- 开环不稳定性:垂直向上的平衡点是不稳定的,而垂直向下是稳定的。
- 约束限制:如行程和力矩限制,这些因素会影响系统的操作范围。
2. 直线倒立摆数学模型
- 微分方程推导:描述倒立摆动态行为的数学模型通常由微分方程建立。
- 模型参数:实际系统中,需要考虑具体的参数,如质量、长度、摩擦系数等。
- 开环响应分析:分析未控制系统的动态响应,以了解其自然行为。
3. 根轨迹法校正
- 根轨迹分析:利用根轨迹图评估系统稳定性,并找出控制器设计的依据。
- 根轨迹校正:通过改变控制器参数改变根轨迹,优化系统性能。
- MATLAB计算仿真:借助MATLAB工具进行系统模拟,验证校正效果。
4. 频域法设计控制器
- 频率响应表示:分析系统在不同频率下的响应特性。
- 频率响应分析:了解系统的幅值和相位特性,用于控制器设计。
- 仿真:在MATLAB Simulink环境下,模拟系统频率响应和控制效果。
- 频率法重新校正:根据仿真结果调整控制器参数,进一步优化性能。
5. PID控制器设计
- PID控制分析:PID控制器是广泛应用的反馈控制策略,结合比例、积分和微分三个成分。
- 参数设定与仿真:通过合理选择PID参数,实现系统的稳定控制,并通过仿真验证效果。
6. 结论与心得
- 结果分析:总结控制策略的效果,评估系统稳定性。
- 心得体会:分享作者在研究过程中的理解和体验。
该文深入研究了倒立摆的控制问题,通过多种校正方法提高系统的稳定性,并通过仿真验证了设计的有效性。这些方法对于理解和设计倒立摆系统具有重要的指导价值。
2.2 实际系统的模型参数
M:小车质量 1.096kg
m:摆杆质量 0.109kg
b:小车摩擦系数 0.1N/sec
l:摆杆转动轴心到杆质心的长度 0.25m
I:摆杆惯量 0.0034kgm
2
得到摆杆角度与小车位移的传递函数:
2.3 开环响应分析
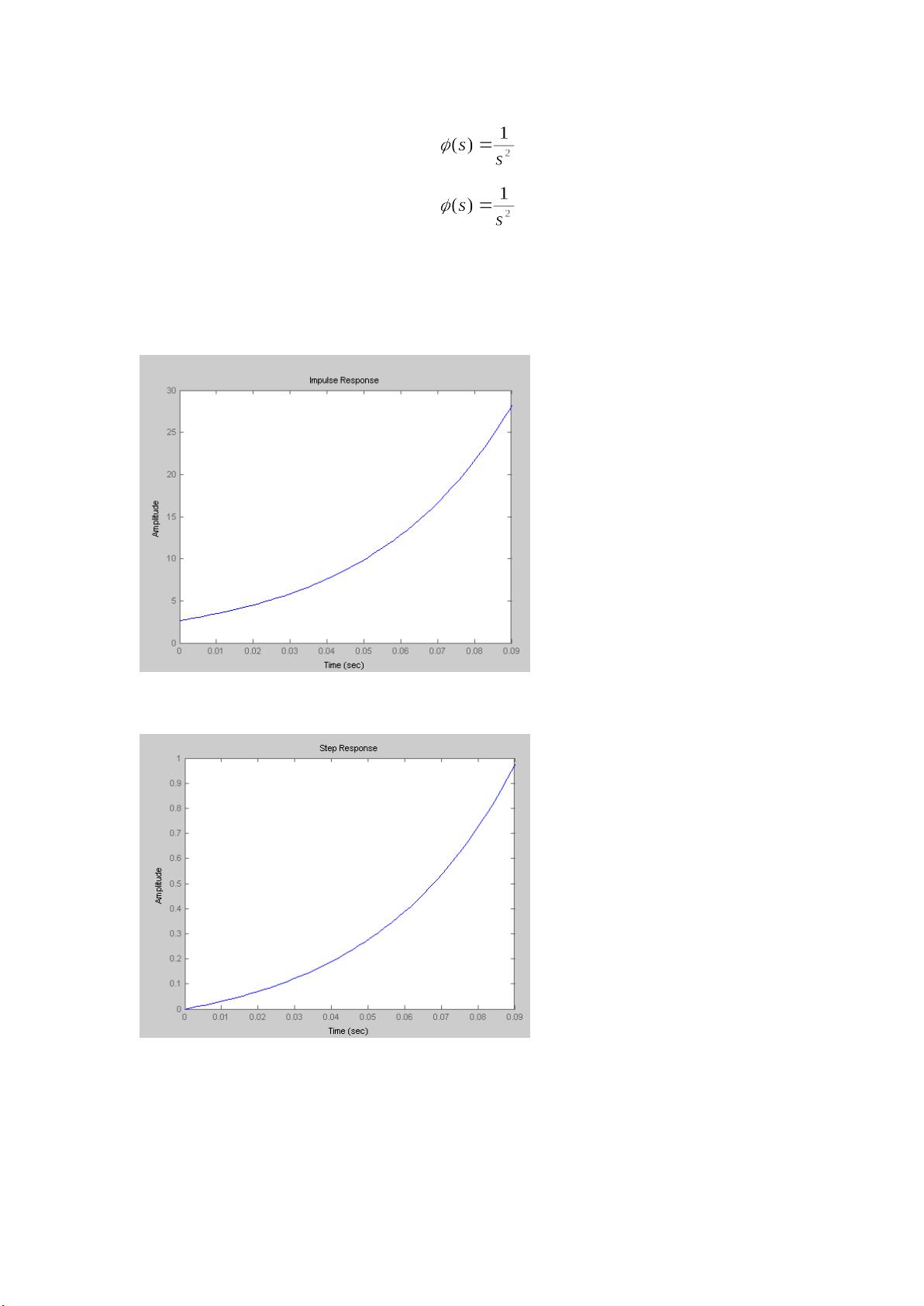
当输入为小车加速度时:
摆杆角度的单位脉冲响应传递函数 ,其图像如
图3:
摆杆角度的单位阶跃响应传递函数 ,其图像如
图4所示:
6
剩余35页未读,继续阅读
点击了解资源详情
2024-05-25 上传
2024-11-22 上传
点击了解资源详情
点击了解资源详情
2014-10-23 上传

lihutiger
- 粉丝: 1
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- PureMVC AS3在Flash中的实践与演示:HelloFlash案例分析
- 掌握Makefile多目标编译与清理操作
- STM32-407芯片定时器控制与系统时钟管理
- 用Appwrite和React开发待办事项应用教程
- 利用深度强化学习开发股票交易代理策略
- 7小时快速入门HTML/CSS及JavaScript基础教程
- CentOS 7上通过Yum安装Percona Server 8.0.21教程
- C语言编程:锻炼计划设计与实现
- Python框架基准线创建与性能测试工具
- 6小时掌握JavaScript基础:深入解析与实例教程
- 专业技能工厂,培养数据科学家的摇篮
- 如何使用pg-dump创建PostgreSQL数据库备份
- 基于信任的移动人群感知招聘机制研究
- 掌握Hadoop:Linux下分布式数据平台的应用教程
- Vue购物中心开发与部署全流程指南
- 在Ubuntu环境下使用NDK-14编译libpng-1.6.40-android静态及动态库
