AUTOSAR CANDriver 4.2.1:全面CAN支持与更新功能详解
需积分: 17 74 浏览量
更新于2024-07-18
收藏 1.64MB PDF 举报
AUTOSAR_SWS_CANDriver文档详细解析
AUTOSAR (AUTomotive Open System ARchitecture) 是一套广泛应用于汽车电子系统开发的开放标准架构,它旨在实现模块化、可扩展性和互操作性。CANDriver是其中的一个关键组件,专用于处理控制器局域网(CAN)通信,这是一种在汽车行业中广泛应用的串行通信总线。
在AUTOSAR Release 4.2.1中,CANDriver的规格得到了增强和改进。首先,文档强调了对CAN Full FDS(Flexible Data Specification)的支持,包括Trigger Transmit功能,这允许更高效的数据传输和控制。此外,取消了CanIf_CancelTxConfirmation函数,可能是为了简化接口或提高性能。
时间管理和唤醒事件处理机制也得到了优化,这对于实时性和响应性至关重要的汽车系统来说非常重要。这次更新还包括了一些小的改进和bug修复,确保了系统的稳定运行。
在4.1.3版本中,新的需求SWS_CAN_00497, SWS_CAN_00498, SWS_CAN_00499, 和 SWS_CAN_00496被添加进来,反映了技术发展和功能增强的需求。同时,一些原有需求如ECUC_Can_00445, SWS_CAN_00487, SWS_CAN_00469, SWS_CAN_00475, and SWS_CAN_00479进行了修改,反映了对安全性和性能提升的关注。另外,两个旧需求SWS_CAN_00476和SWS_Can_00414被移除,可能是由于不再适用或者已被新功能替代。
4.1.2版的改动涉及API(应用程序编程接口)表中的调整,特别是删除了'ScheduledFunctions'章节中的'Timing'列,可能是为了更好地组织和简化接口设计。同时,范围限制和CAN_CHANGE_BAUDRATE_SUPPORT参数定义被更新为CAN_CHANGE_BAUDRATE_API,这可能与更精确的配置管理有关。文档还包含了编辑上的修正和部分内容的调整,可能是为了提高文档的易读性和一致性。
在4.1.1版的AUTOSAR Administration部分,引入了 Pretended Networking支持,这可能是模拟网络环境的功能,便于测试和仿真。另外,添加了一个新的错误分类DET_error_CAN_E_PARAM_BAUDRATE,反映了对通信参数验证的强化。最后,文档序列也得到了纠正,保证了信息的准确传达。
总结来说,AUTOSAR_SWS_CANDriver文档在各个版本中都围绕着CAN Driver的核心功能进行了迭代升级,从基础支持到性能优化、新需求的引入、错误处理机制的完善,以及文档结构的调整,旨在提供一个高效、安全和可靠的汽车电子系统开发平台。对于从事汽车电子系统开发的工程师来说,理解和掌握这些变化对实际项目至关重要。

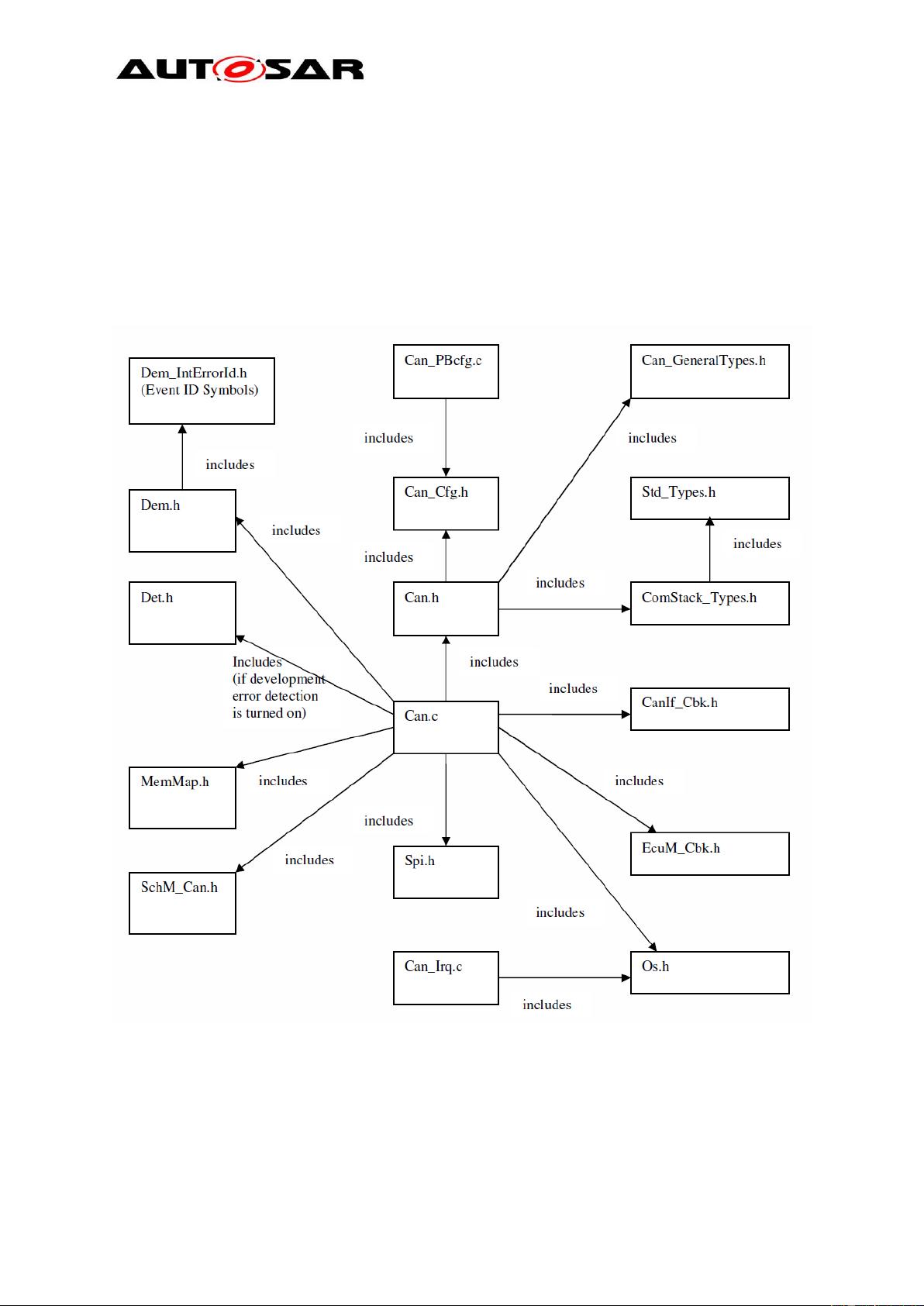
Specification of CAN Driver
AUTOSAR Release 4.2.1
16 of 111 Document ID 011: AUTOSAR_SWS_CANDriver
- AUTOSAR confidential -
4 Constraints and assumptions
4.1 Limitations
A CAN controller always corresponds to one physical channel. It is allowed to
connect physical channels on bus side. Regardless the CanIf module will treat the
concerned CAN controllers separately.
A few CAN hardware units support the possibility to combine several CAN controllers
by using the CAN RAM, to extend the number of message objects for one CAN
controller. These combined CAN controller are handled as one controller by the Can
module.
The Can module does not support CAN remote frames.
[SWS_Can_00237] ⌈The Can module shall not transmit messages triggered by
remote transmission requests.⌋(SRS_Can_01147)
[SWS_Can_00236] ⌈The Can module shall initialize the CAN HW to ignore any
remote transmission requests.⌋(SRS_Can_01147)
4.2 Applicability to car domains
The Can module can be used for any application, where the CAN protocol is used.


剩余110页未读,继续阅读
2020-04-23 上传
2021-10-02 上传
2021-08-31 上传
2021-08-31 上传
2021-10-02 上传
2021-08-31 上传
2021-10-02 上传

weixin_44208168
- 粉丝: 1
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
